Linux内核同步 - spin_lock
一、前言
在linux kernel的实现中,经常会遇到这样的场景:共享数据被中断上下文和进程上下文访问,该如何保护呢?如果只有进程上下文的访问,那`么可以考虑使用semaphore或者mutex的锁机制,但是现在中断上下文也参和进来,那些可以导致睡眠的lock就不能使用了,这时候,可以考虑使用spin lock。本文主要介绍了linux kernel中的spin lock的原理以及代码实现。由于spin lock是architecture dependent代码,因此,我们在第四章讨论了ARM32和ARM64上的实现细节。
注:本文需要进程和中断处理的基本知识作为支撑。
二、工作原理
1、spin lock的特点
我们可以总结spin lock的特点如下:
(1)spin lock是一种死等的锁机制。当发生访问资源冲突的时候,可以有两个选择:一个是死等,一个是挂起当前进程,调度其他进程执行。spin lock是一种死等的机制,当前的执行thread会不断的重新尝试直到获取锁进入临界区。
(2)只允许一个thread进入。semaphore可以允许多个thread进入,spin lock不行,一次只能有一个thread获取锁并进入临界区,其他的thread都是在门口不断的尝试。
(3)执行时间短。由于spin lock死等这种特性,因此它使用在那些代码不是非常复杂的临界区(当然也不能太简单,否则使用原子操作或者其他适用简单场景的同步机制就OK了),如果临界区执行时间太长,那么不断在临界区门口“死等”的那些thread是多么的浪费CPU啊(当然,现代CPU的设计都会考虑同步原语的实现,例如ARM提供了WFE和SEV这样的类似指令,避免CPU进入busy loop的悲惨境地)
(4)可以在中断上下文执行。由于不睡眠,因此spin lock可以在中断上下文中适用。
2、 场景分析
对于spin lock,其保护的资源可能来自多个CPU CORE上的进程上下文和中断上下文的中的访问,其中,进程上下文包括:用户进程通过系统调用访问,内核线程直接访问,来自workqueue中work function的访问(本质上也是内核线程)。中断上下文包括:HW interrupt context(中断handler)、软中断上下文(soft irq,当然由于各种原因,该softirq被推迟到softirqd的内核线程中执行的时候就不属于这个场景了,属于进程上下文那个分类了)、timer的callback函数(本质上也是softirq)、tasklet(本质上也是softirq)。
先看最简单的单CPU上的进程上下文的访问。如果一个全局的资源被多个进程上下文访问,这时候,内核如何交错执行呢?对于那些没有打开preemptive选项的内核,所有的系统调用都是串行化执行的,因此不存在资源争抢的问题。如果内核线程也访问这个全局资源呢?本质上内核线程也是进程,类似普通进程,只不过普通进程时而在用户态运行、时而通过系统调用陷入内核执行,而内核线程永远都是在内核态运行,但是,结果是一样的,对于non-preemptive的linux kernel,只要在内核态,就不会发生进程调度,因此,这种场景下,共享数据根本不需要保护(没有并发,谈何保护呢)。如果时间停留在这里该多么好,单纯而美好,在继续前进之前,让我们先享受这一刻。
当打开premptive选项后,事情变得复杂了,我们考虑下面的场景:
(1)进程A在某个系统调用过程中访问了共享资源R
(2)进程B在某个系统调用过程中也访问了共享资源R
会不会造成冲突呢?假设在A访问共享资源R的过程中发生了中断,中断唤醒了沉睡中的,优先级更高的B,在中断返回现场的时候,发生进程切换,B启动执行,并通过系统调用访问了R,如果没有锁保护,则会出现两个thread进入临界区,导致程序执行不正确。OK,我们加上spin lock看看如何:A在进入临界区之前获取了spin lock,同样的,在A访问共享资源R的过程中发生了中断,中断唤醒了沉睡中的,优先级更高的B,B在访问临界区之前仍然会试图获取spin lock,这时候由于A进程持有spin lock而导致B进程进入了永久的spin……怎么破?linux的kernel很简单,在A进程获取spin lock的时候,禁止本CPU上的抢占(上面的永久spin的场合仅仅在本CPU的进程抢占本CPU的当前进程这样的场景中发生)。如果A和B运行在不同的CPU上,那么情况会简单一些:A进程虽然持有spin lock而导致B进程进入spin状态,不过由于运行在不同的CPU上,A进程会持续执行并会很快释放spin lock,解除B进程的spin状态。
多CPU core的场景和单核CPU打开preemptive选项的效果是一样的,这里不再赘述。
我们继续向前分析,现在要加入中断上下文这个因素。访问共享资源的thread包括:
(1)运行在CPU0上的进程A在某个系统调用过程中访问了共享资源R
(2)运行在CPU1上的进程B在某个系统调用过程中也访问了共享资源R
(3)外设P的中断handler中也会访问共享资源R
在这样的场景下,使用spin lock可以保护访问共享资源R的临界区吗?我们假设CPU0上的进程A持有spin lock进入临界区,这时候,外设P发生了中断事件,并且调度到了CPU1上执行,看起来没有什么问题,执行在CPU1上的handler会稍微等待一会CPU0上的进程A,等它立刻临界区就会释放spin lock的,但是,如果外设P的中断事件被调度到了CPU0上执行会怎么样?CPU0上的进程A在持有spin lock的状态下被中断上下文抢占,而抢占它的CPU0上的handler在进入临界区之前仍然会试图获取spin lock,悲剧发生了,CPU0上的P外设的中断handler永远的进入spin状态,这时候,CPU1上的进程B也不可避免在试图持有spin lock的时候失败而导致进入spin状态。为了解决这样的问题,linux kernel采用了这样的办法:如果涉及到中断上下文的访问,spin lock需要和禁止本CPU上的中断联合使用。
linux kernel中提供了丰富的bottom half的机制,虽然同属中断上下文,不过还是稍有不同。我们可以把上面的场景简单修改一下:外设P不是中断handler中访问共享资源R,而是在的bottom half中访问。使用spin lock+禁止本地中断当然是可以达到保护共享资源的效果,但是使用牛刀来杀鸡似乎有点小题大做,这时候disable bottom half就OK了。
最后,我们讨论一下中断上下文之间的竞争。同一种中断handler之间在uni core和multi core上都不会并行执行,这是linux kernel的特性。如果不同中断handler需要使用spin lock保护共享资源,对于新的内核(不区分fast handler和slow handler),所有handler都是关闭中断的,因此使用spin lock不需要关闭中断的配合。bottom half又分成softirq和tasklet,同一种softirq会在不同的CPU上并发执行,因此如果某个驱动中的sofirq的handler中会访问某个全局变量,对该全局变量是需要使用spin lock保护的,不用配合disable CPU中断或者bottom half。tasklet更简单,因为同一种tasklet不会多个CPU上并发,具体我就不分析了,大家自行思考吧。
三、通用代码实现
1、文件整理
和体系结构无关的代码如下:
(1)include/linux/spinlock_types.h。这个头文件定义了通用spin lock的基本的数据结构(例如spinlock_t)和如何初始化的接口(DEFINE_SPINLOCK)。这里的“通用”是指不论SMP还是UP都通用的那些定义。
(2)include/linux/spinlock_types_up.h。这个头文件不应该直接include,在include/linux/spinlock_types.h文件会根据系统的配置(是否SMP)include相关的头文件,如果UP则会include该头文件。这个头文定义UP系统中和spin lock的基本的数据结构和如何初始化的接口。当然,对于non-debug版本而言,大部分struct都是empty的。
(3)include/linux/spinlock.h。这个头文件定义了通用spin lock的接口函数声明,例如spin_lock、spin_unlock等,使用spin lock模块接口API的驱动模块或者其他内核模块都需要include这个头文件。
(4)include/linux/spinlock_up.h。这个头文件不应该直接include,在include/linux/spinlock.h文件会根据系统的配置(是否SMP)include相关的头文件。这个头文件是debug版本的spin lock需要的。
(5)include/linux/spinlock_api_up.h。同上,只不过这个头文件是non-debug版本的spin lock需要的
(6)linux/spinlock_api_smp.h。SMP上的spin lock模块的接口声明
(7)kernel/locking/spinlock.c。SMP上的spin lock实现。
头文件有些凌乱,我们对UP和SMP上spin lock头文件进行整理:
UP需要的头文件
linux/spinlock_type_up.h:
linux/spinlock_types.h:
linux/spinlock_up.h:
linux/spinlock_api_up.h:
linux/spinlock.h
SMP需要的头文件
asm/spinlock_types.h
linux/spinlock_types.h:
asm/spinlock.h
linux/spinlock_api_smp.h:
linux/spinlock.h
2、数据结构
根据第二章的分析,我们可以基本可以推断出spin lock的实现。首先定义一个spinlock_t的数据类型,其本质上是一个整数值(对该数值的操作需要保证原子性),该数值表示spin lock是否可用。初始化的时候被设定为1。当thread想要持有锁的时候调用spin_lock函数,该函数将spin lock那个整数值减去1,然后进行判断,如果等于0,表示可以获取spin lock,如果是负数,则说明其他thread的持有该锁,本thread需要spin。
内核中的spinlock_t的数据类型定义如下:
typedef struct spinlock {
struct raw_spinlock rlock;
} spinlock_t;
typedef struct raw_spinlock {
arch_spinlock_t raw_lock;
} raw_spinlock_t;
由于各种原因(各种锁的debug、锁的validate机制,多平台支持什么的),spinlock_t的定义没有那么直观,为了让事情简单一些,我们去掉那些繁琐的成员。struct spinlock中定义了一个struct raw_spinlock的成员,为何会如此呢?好吧,我们又需要回到kernel历史课本中去了。在旧的内核中(比如我熟悉的linux 2.6.23内核),spin lock的命令规则是这样:
通用(适用于各种arch)的spin lock使用spinlock_t这样的type name,各种arch定义自己的struct raw_spinlock。听起来不错的主意和命名方式,直到linux realtime tree(PREEMPT_RT)提出对spinlock的挑战。real time linux是一个试图将linux kernel增加硬实时性能的一个分支(你知道的,linux kernel mainline只是支持soft realtime),多年来,很多来自realtime branch的特性被merge到了mainline上,例如:高精度timer、中断线程化等等。realtime tree希望可以对现存的spinlock进行分类:一种是在realtime kernel中可以睡眠的spinlock,另外一种就是在任何情况下都不可以睡眠的spinlock。分类很清楚但是如何起名字?起名字绝对是个技术活,起得好了事半功倍,可维护性好,什么文档啊、注释啊都素那浮云,阅读代码就是享受,如沐春风。起得不好,注定被后人唾弃,或者拖出来吊打(这让我想起给我儿子起名字的那段不堪回首的岁月……)。最终,spin lock的命名规范定义如下:
(1)spinlock,在rt linux(配置了PREEMPT_RT)的时候可能会被抢占(实际底层可能是使用支持PI(优先级翻转)的mutext)。
(2)raw_spinlock,即便是配置了PREEMPT_RT也要顽强的spin
(3)arch_spinlock,spin lock是和architecture相关的,arch_spinlock是architecture相关的实现
对于UP平台,所有的arch_spinlock_t都是一样的,定义如下:
typedef struct { } arch_spinlock_t;
什么都没有,一切都是空啊。当然,这也符合前面的分析,对于UP,即便是打开的preempt选项,所谓的spin lock也不过就是disable preempt而已,不需定义什么spin lock的变量。
对于SMP平台,这和arch相关,我们在下一节描述。
3、spin lock接口API
我们整理spin lock相关的接口API如下:
接口API的类型 spinlock中的定义 raw_spinlock的定义
定义spin lock并初始化 DEFINE_SPINLOCK DEFINE_RAW_SPINLOCK
动态初始化spin lock spin_lock_init raw_spin_lock_init
获取指定的spin lock spin_lock raw_spin_lock
获取指定的spin lock同时disable本CPU中断 spin_lock_irq raw_spin_lock_irq
保存本CPU当前的irq状态,disable本CPU中断并获取指定的spin lock spin_lock_irqsave raw_spin_lock_irqsave
获取指定的spin lock同时disable本CPU的bottom half spin_lock_bh raw_spin_lock_bh
释放指定的spin lock spin_unlock raw_spin_unlock
释放指定的spin lock同时enable本CPU中断 spin_unlock_irq raw_spin_unock_irq
释放指定的spin lock同时恢复本CPU的中断状态 spin_unlock_irqstore raw_spin_unlock_irqstore
获取指定的spin lock同时enable本CPU的bottom half spin_unlock_bh raw_spin_unlock_bh
尝试去获取spin lock,如果失败,不会spin,而是返回非零值 spin_trylock raw_spin_trylock
判断spin lock是否是locked,如果其他的thread已经获取了该lock,那么返回非零值,否则返回0 spin_is_locked raw_spin_is_locked
在具体的实现面,我们不可能把每一个接口函数的代码都呈现出来,我们选择最基础的spin_lock为例子,其他的读者可以自己阅读代码来理解。
spin_lock的代码如下:
static inline void spin_lock(spinlock_t *lock)
{
raw_spin_lock(&lock->rlock);
}
当然,在linux mainline代码中,spin_lock和raw_spin_lock是一样的,在realtime linux patch中,spin_lock应该被换成可以sleep的版本,当然具体如何实现我没有去看(也许直接使用了Mutex,毕竟它提供了优先级继承特性来解决了优先级翻转的问题),有兴趣的读者可以自行阅读,我们这里重点看看(本文也主要focus这个主题)真正的,不睡眠的spin lock,也就是是raw_spin_lock,代码如下:
#define raw_spin_lock(lock) _raw_spin_lock(lock)
UP中的实现:
#define _raw_spin_lock(lock) __LOCK(lock)
#define __LOCK(lock) \
do { preempt_disable(); ___LOCK(lock); } while (0)
SMP的实现:
void __lockfunc _raw_spin_lock(raw_spinlock_t *lock)
{
__raw_spin_lock(lock);
}
static inline void __raw_spin_lock(raw_spinlock_t *lock)
{
preempt_disable();
spin_acquire(&lock->dep_map, 0, 0, RET_IP);
LOCK_CONTENDED(lock, do_raw_spin_trylock, do_raw_spin_lock);
}
UP中很简单,本质上就是一个preempt_disable而已,和我们在第二章中分析的一致。SMP中稍显复杂,preempt_disable当然也是必须的,spin_acquire可以略过,这是和运行时检查锁的有效性有关的,如果没有定义CONFIG_LOCKDEP其实就是空函数。如果没有定义CONFIG_LOCK_STAT(和锁的统计信息相关),LOCK_CONTENDED就是调用do_raw_spin_lock而已,如果没有定义CONFIG_DEBUG_SPINLOCK,它的代码如下:
static inline void do_raw_spin_lock(raw_spinlock_t *lock) __acquires(lock)
{
__acquire(lock);
arch_spin_lock(&lock->raw_lock);
}
__acquire和静态代码检查相关,忽略之,最终实际的获取spin lock还是要靠arch相关的代码实现。
四、ARM平台的细节
代码位于arch/arm/include/asm/spinlock.h和spinlock_type.h,和通用代码类似,spinlock_type.h定义ARM相关的spin lock定义以及初始化相关的宏;spinlock.h中包括了各种具体的实现。
1、回忆过去
在分析新的spin lock代码之前,让我们先回到2.6.23版本的内核中,看看ARM平台如何实现spin lock的。和arm平台相关spin lock数据结构的定义如下(那时候还是使用raw_spinlock_t而不是arch_spinlock_t):
typedef struct {
volatile unsigned int lock;
} raw_spinlock_t;
一个整数就OK了,0表示unlocked,1表示locked。配套的API包括__raw_spin_lock和__raw_spin_unlock。__raw_spin_lock会持续判断lock的值是否等于0,如果不等于0(locked)那么其他thread已经持有该锁,本thread就不断的spin,判断lock的数值,一直等到该值等于0为止,一旦探测到lock等于0,那么就设定该值为1,表示本thread持有该锁了,当然,这些操作要保证原子性,细节和exclusive版本的ldr和str(即ldrex和strexeq)相关,这里略过。立刻临界区后,持锁thread会调用__raw_spin_unlock函数是否spin lock,其实就是把0这个数值赋给lock。
这个版本的spin lock的实现当然可以实现功能,而且在没有冲突的时候表现出不错的性能,不过存在一个问题:不公平。也就是所有的thread都是在无序的争抢spin lock,谁先抢到谁先得,不管thread等了很久还是刚刚开始spin。在冲突比较少的情况下,不公平不会体现的特别明显,然而,随着硬件的发展,多核处理器的数目越来越多,多核之间的冲突越来越剧烈,无序竞争的spinlock带来的performance issue终于浮现出来,根据Nick Piggin的描述:
On an 8 core (2 socket) Opteron, spinlock unfairness is extremely noticable, with a userspace test having a difference of up to 2x runtime per thread, and some threads are starved or “unfairly” granted the lock up to 1 000 000 (!) times.
多么的不公平,有些可怜的thread需要饥饿的等待1000000次。本质上无序竞争从概率论的角度看应该是均匀分布的,不过由于硬件特性导致这么严重的不公平,我们来看一看硬件block:
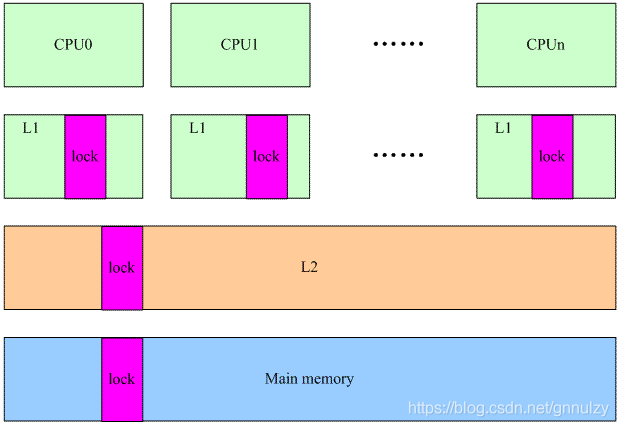
lock
lock本质上是保存在main memory中的,由于cache的存在,当然不需要每次都有访问main memory。在多核架构下,每个CPU都有自己的L1 cache,保存了lock的数据。假设CPU0获取了spin lock,那么执行完临界区,在释放锁的时候会调用smp_mb invalide其他忙等待的CPU的L1 cache,这样后果就是释放spin lock的那个cpu可以更快的访问L1cache,操作lock数据,从而大大增加的下一次获取该spin lock的机会。
2、回到现在:arch_spinlock_t
ARM平台中的arch_spinlock_t定义如下(little endian):
typedef struct {
union {
u32 slock;
struct __raw_tickets {
u16 owner;
u16 next;
} tickets;
};
} arch_spinlock_t;
本来以为一个简单的整数类型的变量就搞定的spin lock看起来没有那么简单,要理解这个数据结构,需要了解一些ticket-based spin lock的概念。如果你有机会去九毛九去排队吃饭(声明:不是九毛九的饭托,仅仅是喜欢面食而常去吃而已)就会理解ticket-based spin lock。大概是因为便宜,每次去九毛九总是无法长驱直入,门口的笑容可掬的靓女会给一个ticket,上面写着15号,同时会告诉你,当前状态是10号已经入席,11号在等待。
回到arch_spinlock_t,这里的owner就是当前已经入席的那个号码,next记录的是下一个要分发的号码。下面的描述使用普通的计算机语言和在九毛九就餐(假设九毛九只有一张餐桌)的例子来进行描述,估计可以让吃货更有兴趣阅读下去。最开始的时候,slock被赋值为0,也就是说owner和next都是0,owner和next相等,表示unlocked。当第一个个thread调用spin_lock来申请lock(第一个人就餐)的时候,owner和next相等,表示unlocked,这时候该thread持有该spin lock(可以拥有九毛九的唯一的那个餐桌),并且执行next++,也就是将next设定为1(再来人就分配1这个号码让他等待就餐)。也许该thread执行很快(吃饭吃的快),没有其他thread来竞争就调用spin_unlock了(无人等待就餐,生意惨淡啊),这时候执行owner++,也就是将owner设定为1(表示当前持有1这个号码牌的人可以就餐)。姗姗来迟的1号获得了直接就餐的机会,next++之后等于2。1号这个家伙吃饭巨慢,这是不文明现象(thread不能持有spin lock太久),但是存在。又来一个人就餐,分配当前next值的号码2,当然也会执行next++,以便下一个人或者3的号码牌。持续来人就会分配3、4、5、6这些号码牌,next值不断的增加,但是owner岿然不动,直到欠扁的1号吃饭完毕(调用spin_unlock),释放饭桌这个唯一资源,owner++之后等于2,表示持有2那个号码牌的人可以进入就餐了。
3、接口实现
同样的,这里也只是选择一个典型的API来分析,其他的大家可以自行学习。我们选择的是arch_spin_lock,其ARM32的代码如下:
static inline void arch_spin_lock(arch_spinlock_t *lock)
{
unsigned long tmp;
u32 newval;
arch_spinlock_t lockval;
prefetchw(&lock->slock);------------------------(1)
__asm__ __volatile__(
“1: ldrex %0, [%3]\n”-------------------------(2)
" add %1, %0, %4\n"
" strex %2, %1, [%3]\n"------------------------(3)
" teq %2, #0\n"----------------------------(4)
" bne 1b"
: “=&r” (lockval), “=&r” (newval), “=&r” (tmp)
: “r” (&lock->slock), “I” (1 << TICKET_SHIFT)
: “cc”);
while (lockval.tickets.next != lockval.tickets.owner) {------------(5)
wfe();-------------------------------(6)
lockval.tickets.owner = ACCESS_ONCE(lock->tickets.owner);------(7)
}
smp_mb();------------------------------(8)
}
(1)和preloading cache相关的操作,主要是为了性能考虑
(2)将slock的值保存在lockval这个临时变量中
(3)将spin lock中的next加一
(4)判断是否有其他的thread插入。更具体的细节参考Linux内核同步机制之(一):原子操作中的描述
(5)判断当前spin lock的状态,如果是unlocked,那么直接获取到该锁
(6)如果当前spin lock的状态是locked,那么调用wfe进入等待状态。更具体的细节请参考ARM WFI和WFE指令中的描述。
(7)其他的CPU唤醒了本cpu的执行,说明owner发生了变化,该新的own赋给lockval,然后继续判断spin lock的状态,也就是回到step 5。
(8)memory barrier的操作,具体可以参考memory barrier中的描述。
arch_spin_lock函数ARM64的代码(来自4.1.10内核)如下:
static inline void arch_spin_lock(arch_spinlock_t *lock)
{
unsigned int tmp;
arch_spinlock_t lockval, newval;
asm volatile(
/* Atomically increment the next ticket. */
" prfm pstl1strm, %3\n"
“1: ldaxr %w0, %3\n”-----(A)-----------lockval = lock
" add %w1, %w0, %w5\n"-------------newval = lockval + (1 << 16),相当于next++
" stxr %w2, %w1, %3\n"--------------lock = newval
" cbnz %w2, 1b\n"--------------是否有其他PE的执行流插入?有的话,重来。
/* Did we get the lock? /
" eor %w1, %w0, %w0, ror #16\n"--lockval中的next域就是自己的号码牌,判断是否等于owner
" cbz %w1, 3f\n"----------------如果等于,持锁进入临界区
/
* No: spin on the owner. Send a local event to avoid missing an
* unlock before the exclusive load.
/
" sevl\n"
“2: wfe\n”--------------------否则进入spin
" ldaxrh %w2, %4\n"----(A)---------其他cpu唤醒本cpu,获取当前owner值
" eor %w1, %w2, %w0, lsr #16\n"---------自己的号码牌是否等于owner?
" cbnz %w1, 2b\n"----------如果等于,持锁进入临界区,否者回到2,即继续spin
/ We got the lock. Critical section starts here. */
“3:”
: “=&r” (lockval), “=&r” (newval), “=&r” (tmp), “+Q” (*lock)
: “Q” (lock->owner), “I” (1 << TICKET_SHIFT)
: “memory”);
}
基本的代码逻辑的描述都已经嵌入代码中,这里需要特别说明的有两个知识点:
(1)Load-Acquire/Store-Release指令的应用。Load-Acquire/Store-Release指令是ARMv8的特性,在执行load和store操作的时候顺便执行了memory barrier相关的操作,在spinlock这个场景,使用Load-Acquire/Store-Release指令代替dmb指令可以节省一条指令。上面代码中的(A)就标识了使用Load-Acquire指令的位置。Store-Release指令在哪里呢?在arch_spin_unlock中,这里就不贴代码了。Load-Acquire/Store-Release指令的作用如下:
-Load-Acquire可以确保系统中所有的observer看到的都是该指令先执行,然后是该指令之后的指令(program order)再执行
-Store-Release指令可以确保系统中所有的observer看到的都是该指令之前的指令(program order)先执行,Store-Release指令随后执行
(2)第二个知识点是关于在arch_spin_unlock代码中为何没有SEV指令?关于这个问题可以参考ARM ARM文档中的Figure B2-5,这个图是PE(n)的global monitor的状态迁移图。当PE(n)对x地址发起了exclusive操作的时候,PE(n)的global monitor从open access迁移到exclusive access状态,来自其他PE上针对x(该地址已经被mark for PE(n))的store操作会导致PE(n)的global monitor从exclusive access迁移到open access状态,这时候,PE(n)的Event register会被写入event,就好象生成一个event,将该PE唤醒,从而可以省略一个SEV的指令。
注:
(1)+表示在嵌入的汇编指令中,该操作数会被指令读取(也就是说是输入参数)也会被汇编指令写入(也就是说是输出参数)。
(2)=表示在嵌入的汇编指令中,该操作数会是write only的,也就是说只做输出参数。
(3)I表示操作数是立即数
spin_lock的分析文章Google一下有很多,这里只是分享一些关于spin_lock思考过的问题。
一、UP 下spin_lock的实现
UP的情况下,spin_lock本身并没有实现锁机制,相对应的spin_lock()只是禁用了内核抢占而已。如下代码:
//@include/linux/spinlock_api_up.h
#define _raw_spin_lock(lock) __LOCK(lock)
/*
-
In the UP-nondebug case there’s no real locking going on, so the
-
only thing we have to do is to keep the preempt counts and irq
-
flags straight, to suppress compiler warnings of unused lock
-
variables, and to add the proper checker annotations:
*/
#define __LOCK(lock)
do { preempt_disable(); __acquire(lock); (void)(lock); } while (0)
#define preempt_disable()
do {
preempt_count_inc();
barrier();
} while (0)
由以上代码可知,UP下spin_lock仅仅是禁用了内核抢占,而此时IRQ是可以正常触发的。那就先考虑tick中断——即,UP下,持有spin_lock的进程会被调度器切走么?1)UP下,spin_lock() 是不会失败的, 但spin_lock() 保护的临界代码还是需要一定时间执行的,这期间内核抢占被禁止,那当前进程有可能被切走么?
先假设CFS(先假设调度器用的是CFS)在禁止内核抢占的情况下不会将当前进程切走,那么,仅仅禁用内核抢占可以保证临界区代码不会被进程上下文重入;如果,CFS并不理会抢占计数,会强制剥夺当前进程的CPU使用权,那么就存在spin_lock()保护的临界区代码被进程上下文重入的问题。
2)再考虑,spin_lock() 临界区被中断上下文重入的问题。
以上两点,都不会造成死锁或者CPU Halt, 因为UP下spin_lock()没有进行锁等待,所以存在的就只是代码重入问题,也即,即便用spin_lock()进行保护,这段代码还是有被重入的可能。
那问题已经提出来了,就看看代码如何实现?先看CFS的周期调度代码,如下代码确认当前进程是否需要重新调度:
static void check_preempt_tick(struct cfs_rq *cfs_rq, struct sched_entity curr)
{
…
ideal_runtime = sched_slice(cfs_rq, curr);
/
- 计算该进程的预期运行时间:
*当cfs_rq中的运行进程不大于sched_nr_latency(8)时,各个进程的ideal_runtime是一个常量
*之所以是常量,是因为period是常量(sysctl_sched_latency=6000000)。
*当cfs_rq中的运行进程大于sched_nr_latency时,period = nr_running * sysctl_sched_min_granularity;
*其中,sysctl_sched_min_granularity是750000.
*ideal_runtime *= period * weight/load;
*/
if (delta_exec > ideal_runtime)
{
//delta_exec 实际运行的时间已经超过其预计运行时间,
//调用resched_task将该进程设置为TIF_NEED_RESCHED,即需要重新调度的;
resched_task(rq_of(cfs_rq)->curr);
//clear buddy cache??
//个人的理解是buddy的缓冲信息可能会影响CFS,使其优先选择有buddy缓冲
//的进程,更高效的利用缓冲。
clear_buddies(cfs_rq, curr);
return;
}
//如果运行时间小于sysctl_sched_min_granularity(最小执行时间)
//则直接返回,让当前继续执行。
if (delta_exec < sysctl_sched_min_granularity)
return;
se = __pick_first_entity(cfs_rq);
delta = curr->vruntime - se->vruntime;
//如果最左边的se并不处于饥渴等待状态。
//可能当前进程的没得到足够执行时间,或者当前进程的优先级比最左边se更高。
//这种情况下,直接返回,让当前进程接着跑。
if (delta < 0)
return;
//如果最左边的se的等待时间已经大于curr的ideal_runtime,表明处于CPU饥渴
//状态,则将当前task设置成TIF_NEED_RESCHED,触发调度;
if (delta > ideal_runtime)
resched_task(rq_of(cfs_rq)->curr);
}
由此可见,这里也只是设置了RESCHED FLAG,真正的调度工作还是交给了中断返回时的do_work_pending(),而我们知道内核抢占被禁用的情况下,当前进程是不会被切走的,即不会重新调度,所以第一个问题就澄清了,即进程上下文重入的问题是不会发生的。
接着,中断上下文是否会发生重入?考虑这样的情况:进程A陷入内核,获取spin_lock,正在执行临界区代码,被IRQ打断,且ISR中要获取同一个spin_lock,在UP下,ISR不会由于锁等待而halt住,中断返回后,进程A继续执行,就像什么都没发生过一样,但是这样就没有起到防止重入的作用,临界变量可能已经改变,而进程A却不知道。而这种情况,仔细想想除了禁用本地中断之外似乎没有什么办法可以避免了。
所以,在UP情况下,如果临界区有可能被ISR访问的话,那么就应该是用 spin_lock_irq() 而不是仅仅用 spin_lock() 了事。
二、SMP下 spin_lock 的实现
spin_lock 在SMP下实现肯定要比UP下复杂得多,看代码:
//@include/linux/spinlock_api_smp.h
static inline void __raw_spin_lock(raw_spinlock_t *lock)
{
preempt_disable();
spin_acquire(&lock->dep_map, 0, 0, RET_IP);
LOCK_CONTENDED(lock, do_raw_spin_trylock, do_raw_spin_lock);
}
preempt_disable()不再解释,spin_acquire() 是sparse检查需要,用来检查死锁的,LOCK_CONTENDED是一个宏定义,先调用do_raw_spin_trylock()尝试获得锁,不等待,如果失败在调用do_raw_spin_lock() 忙等待unlock. do_row_spin_trylock()的代码不分析了,和do_raw_spin_lock()一样,只是不循环等待,直接看do_raw_spin_lock()代码:
static inline void arch_spin_lock(arch_spinlock_t *lock)
{
unsigned long tmp;
asm volatile(
“1: ldrex %0, [%1]\n”
" teq %0, #0\n"
WFE(“ne”)
" strexeq %0, %2, [%1]\n"
" teqeq %0, #0\n"
" bne 1b"
: “=&r” (tmp)
: “r” (&lock->lock), “r” (1)
: “cc”);
smp_mb();
}
这段内嵌汇编首先检查lock->lock,如果等于0,就表明现在是unlock状态,就把lock->lock置位1,表示lock状态。这段汇编里边,关键的三个指令是:ldrex, strexeq, WFE, 前两个指令实现独占访问储存器,保证"读取-修改-写入”在芯片级是原子的,而WFE是wait for event, 和WFI类似,只是他可以被SEV指令唤醒,在spin_unlock()的时候,会发出SEV。
具体可以参见蜗蜗的文章:http://www.wowotech.net/armv8a_arch/wfe_wfi.html
了解SMP 平台下的spin_lock之后,还是那两个问题,进程上下文重入和中断上下文重入。第一个问题已经澄清,那第二个问题呢?重现之前的情景:进程A陷入内核,获取spin_lock,正在执行临界区代码,被本地IRQ打断,且ISR中要获取同一个spin_lock, 在SMP下,ISR就要调用WFE进入low-power-mode,这样持有锁的内核路径也得不到运行,所以无法释放锁资源,ISR也就只能一直WFE,本地CPU就这样挂掉了。当然,当IRQ在其他CPU上的时候,这种情况是不会发生的,另一个CPU为WFE直到本地CPU释放锁资源。
所以,这样又回到之前的解决办法,如果ISR有可能重入临界区,那么就应该使用 spin_lock_irq() 而非 spin_lock()。如果不这样使用,在UP下,临界数据将错乱,而在SMP下,CPU将死锁。