碰撞检测之Ray-Cylinder检测
正交基和标准正交基
首先来看定义
Let S = {v1, v2, ... , vk} be a set of vectors in Rn, then S is called an orthogonal if
vi . vj=0
for all i not equal to j. An orthogonal set of vectors is called orthonormal if all vectors in S are unit vectors.
咳咳,翻译一下
对于 Rn中的一个向量集合 S={v1, v2, ... , vk} , 如果存在
vi . vj = 0 (i != j)
那么它们就是一组正交基,如果它们都是单位向量,则它们还是标准正交基。
定理
1.给定一组正交基S = {v1, v2, ... , vk},那么他们是线性相关的。
2.对于 Rn中的一个正交基 S={v1, v2, ... , vk},则 Rn中的向量 v 的以S为基的第 i 个坐标为
v . vj
例
求向量(5, 10) 在基 S = {(3/5, 4/5), (-4/5, 3/5)}中的坐标。
(5,10).(3/5,4/5) = 11
(5,10).(-4/5, 3/5) = 2
[(5,10)]S = (11,2)
给定一个空间向量,求出以这个向量为轴的正交基
解
假设给定的空间向量为
v = (a,b,c);
则与v垂直的向量必定满足
a*x + b*y + c*z = 0
这个向量可以是u = (0;-c;b) 或者 u = (-c,0,a);
已知两个向量,第三个向量利用向量叉乘就可以得出
w = cross(u,v)
最后将u,v,w单位化,得到新的正交基。
不同正交基下的坐标变换
同一个向量,在不同的基下面的坐标是不同的。因此,可以用正交矩阵来代表坐标系(也可以看作基)从而写出在统一的参考系(全局坐标系)下同一个向量在不同基中的坐标。
已知一个基Q和向量v在它之中的坐标v’,以及另外一个基R,我们可以通过v=Qv’=Rv’’公式来计算v’’。

上面就是求v’’的公式,注意到右边需要计算基R的逆矩阵R^-1,因为基R是正交矩阵,而正交矩阵的一个重要性质就是逆等于转置。因此,我们可以把它写成
![]()
这个公式就是坐标转换公式。特别地,如果Q是和参考系相同的坐标系(3D编程中大多数情况下如此),比如世界坐标系,则Q是一个单位矩阵I,则我们可以把它写成
![]()
这个坐标转换公式可以解释为:对于世界坐标系中的向量v’,它在坐标系R中的坐标是v’’
我们还可以得到哟个有趣的结论:
假设原始的坐标系为x-(1,0,0), y-(0,1,0), z(0,0,1),这个坐标系经过一个旋转矩阵Matrix旋转之后,新的坐标系就是这个旋转矩阵的转置三个列向量。
圆柱体的射线求交
上面啰嗦到的两个地方这里都会用到。
首先还是定义圆柱体的类
public class Cylinder : NGeometry
{
public Vector3 p0;
public Vector3 p1;
public float radius;
public Cylinder(Vector3 _p0, Vector3 _p1, float _radius)
: base(GeometryType.Cylinder)
{
p0 = _p0;
p1 = _p1;
radius = _radius;
}
public Cylinder() : base(GeometryType.Cylinder) { }
public Vector3 ComputeDirection()
{
return p1 - p0;
}
}看检测的代码,有点长
public static bool Raycast(Ray ray, float distance, Cylinder cylinder, out RaycastHitInfo hitInfo)
{
hitInfo = new RaycastHitInfo();
Vector3 cylinderDir = cylinder.ComputeDirection();
Vector3 kW = cylinderDir;
float fWLength = kW.magnitude;
kW.Normalize();
//two thin for check
if (fWLength <= 1e-6f)
{
return false;
}
//generate orthonormal basis
//cylinder along the z direction
Vector3 kU = Vector3.zero;
if (fWLength > 0.0f)
{
float fInvLength;
if (Mathf.Abs(kW.x) >= Mathf.Abs(kW.y))
{
fInvLength = 1.0f / Mathf.Sqrt(kW.x * kW.x + kW.z * kW.z);
kU.x = -kW.z * fInvLength;
kU.y = 0.0f;
kU.z = kW.x * fInvLength;
}
else
{
// W.y or W.z is the largest magnitude component, swap them
fInvLength = 1.0f / Mathf.Sqrt(kW.y * kW.y + kW.z * kW.z);
kU.x = 0.0f;
kU.y = kW.z * fInvLength;
kU.z = -kW.y * fInvLength;
}
}
Vector3 kV = Vector3.Cross(kW, kU);
kV.Normalize();
// compute intersection
//Transform the ray to the cylinder's local coordinate
//new Ray direction
Vector3 kD = new Vector3(Vector3.Dot(kU, ray.direction), Vector3.Dot(kV, ray.direction), Vector3.Dot(kW, ray.direction));
float fDLength = kD.magnitude;
Debug.Log("fDLength: " + fDLength);
kD.Normalize();
float fInvDLength = 1.0f / fDLength;
Vector3 kDiff = ray.origin - cylinder.p0;
//new Ray origin
Vector3 kP = new Vector3(Vector3.Dot(kU, kDiff), Vector3.Dot(kV, kDiff), Vector3.Dot(kW, kDiff));
float fRadiusSqr = cylinder.radius * cylinder.radius;
// Is the ray direction parallel to the cylinder direction? (or zero)
if (Mathf.Abs(kD.z) >= 1.0f - Mathf.Epsilon || fDLength < Mathf.Epsilon)
{
float fAxisDir = Vector4.Dot(ray.direction, cylinderDir);
float fDiscr = fRadiusSqr - kP.x * kP.x - kP.y * kP.y;
// ray direction anti-parallel to the cylinder direction
if (fAxisDir < 0 && fDiscr >= 0.0f)
{
if (kP.z > fWLength)
{
hitInfo.distance = (kP.z - fWLength) * fInvDLength;
}
else if (kP.z < 0)
{
return false;
}
else if (kP.z > 0 && kP.z < fWLength)
{
hitInfo.distance = kP.z * fInvDLength;
}
if (hitInfo.distance > distance)
return false;
hitInfo.point = hitInfo.distance * ray.direction;
return true;
}
// ray direction parallel to the cylinder direction
else if (fAxisDir > 0 && fDiscr >= 0.0f)
{
if (kP.z > fWLength)
{
return false;
}
else if (kP.z < 0)
{
hitInfo.distance = -kP.z * fInvDLength;
}
else if (kP.z > 0 && kP.z < fWLength)
{
hitInfo.distance = (fWLength - kP.z) * fInvDLength;
}
if (hitInfo.distance > distance)
return false;
hitInfo.point = hitInfo.distance * ray.direction;
return true;
}
else
{
//ray origin out of the circle
return false;
}
}
// test intersection with infinite cylinder
// set up quadratic Q(t) = a*t^2 + 2*b*t + c
float fA = kD.x * kD.x + kD.y * kD.y;
float fB = kP.x * kD.x + kP.y * kD.y;
float fC = kP.x * kP.x + kP.y * kP.y - fRadiusSqr;
float delta = fB * fB - fA * fC;
// line does not intersect infinite cylinder
if (delta < 0.0f)
{
return false;
}
// line intersects infinite cylinder in two points
if (delta > 0.0f)
{
float fRoot = Mathf.Sqrt(delta);
float fInv = 1.0f / fA;
float fT = (-fB - fRoot) * fInv;
float fTmp = kP.z + fT * kD.z;
float dist0 = 0f, dist1 = 0f;
float fT1 = (-fB + fRoot) * fInv;
float fTmp1 = kP.z + fT * kD.z;
//cast two point
//fTmp <= fWLength to check intersect point between slab.
if ((0.0f <= fTmp && fTmp <= fWLength) && (0.0f <= fTmp1 && fTmp1 <= fWLength))
{
dist0 = fT * fInvDLength;
dist1 = fT1 * fInvDLength;
hitInfo.distance = Mathf.Min(dist0, dist1);
return true;
}
else if ((0.0f <= fTmp && fTmp <= fWLength))
{
dist0 = fT * fInvDLength;
hitInfo.distance = dist0;
return true;
}
else if ((0.0f <= fTmp1 && fTmp1 <= fWLength))
{
dist1 = fT1 * fInvDLength;
hitInfo.distance = dist1;
return true;
}
//If intersect the infinite cylinder but point not between slab, the ray may intersect cylinder's caps.
//Test intersection with caps
float deltaAngle = Vector4.Dot(ray.direction, cylinderDir);
// Ray direction anti-parallel to the capsule direction
if (deltaAngle < 0)
{
if (kP.z > fWLength)
{
float deltaZ = kP.z - fWLength;
float angle = Vector3.Angle(ray.direction, -cylinderDir);
hitInfo.distance = (kP.z - fWLength) * fInvDLength / Mathf.Cos(angle * Mathf.Deg2Rad);
}
else if (kP.z < 0)
{
Debug.Log("No cap0");
return false;
}
if (hitInfo.distance > distance)
return false;
hitInfo.point = ray.origin + hitInfo.distance * ray.direction;
if (Vector3.Distance(hitInfo.point, cylinder.p1) > cylinder.radius)
{
return false;
}
return true;
}
// Direction parallel to the cylinder direction
else if (deltaAngle > 0)
{
if (kP.z > fWLength)
{
Debug.Log("No cap1");
return false;
}
else if (kP.z < 0)
{
float angle = Vector3.Angle(ray.direction, cylinderDir);
hitInfo.distance = -kP.z * fInvDLength / Mathf.Cos(angle * Mathf.Deg2Rad);
}
if (hitInfo.distance > distance)
return false;
hitInfo.point = ray.origin + hitInfo.distance * ray.direction;
if (Vector3.Distance(hitInfo.point, cylinder.p0) > cylinder.radius)
{
return false;
}
return true;
}
}
// line is tangent to infinite cylinder
else
{
float fT = -fB / fA;
float fTmp = kP.z + fT * kD.z;
if (0.0f <= fTmp && fTmp <= fWLength)
{
hitInfo.distance = fT * fInvDLength;
return true;
}
}
return false;
}简单梳理一下流程
1.将坐标系转换到了以圆柱体方向为轴的坐标系,用的就是给定一个空间向量,求出以这个向量为轴的正交基中提到的方法;
2.将Ray的origin和Direction都转到新的坐标系下,用的是上面的定理2。新的ray的origin为kP,direction为kD,射线上的点可以表示为kP+t*kD;
3.判断射线方向是否与Z轴方向平行,如果是,判断是否是圆柱体的上下面相交;
4.判断是否是圆柱相交,这里先假设圆柱是无限的,判断的方法是求解二次方程。这里详细说一下,二次函数的形式为
Q(t) = a*t^2 + 2*b*t + c
假设设想和圆柱相交,则必定存在射线上存在t,满足点kP+t*kD到Z轴的距离为圆柱的半径
(kP.x +t*kD.x)^2 +(kP.y +t*kD.y)^2 = R^2
先通过delta判断根的个数,最后求解就可以得到结果。
测试代码
using UnityEngine;
using System.Collections;
using NPhysX;
public class RayCylinderTester : MonoBehaviour {
public GameObject cylinder;
Cylinder _cylinder;
Ray ray;
float castDistance = 10f;
// Use this for initialization
void Start () {
_cylinder = new Cylinder();
}
// Update is called once per frame
void Update () {
ray = new Ray(Vector3.zero, new Vector3(1, 1, 1));
_cylinder.radius = 0.5f * cylinder.transform.localScale.x;
_cylinder.p0 = cylinder.transform.position + cylinder.transform.rotation * Vector3.down * cylinder.transform.localScale.y;
_cylinder.p1 = cylinder.transform.position + cylinder.transform.rotation * Vector3.up * cylinder.transform.localScale.y;
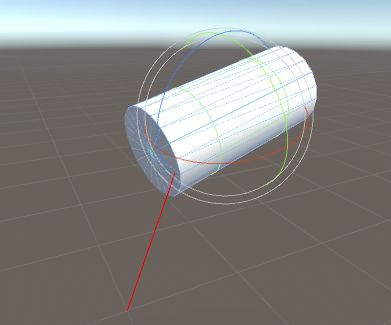
Debug.DrawLine(_cylinder.p0, _cylinder.p1, Color.green);
RaycastHitInfo hitinfo = new RaycastHitInfo();
if (NRaycastTests.Raycast(ray, castDistance, _cylinder, out hitinfo))
{
Debug.DrawLine(ray.origin, ray.origin + ray.direction * hitinfo.distance, Color.red, 0, true);
}
else
{
Debug.DrawLine(ray.origin, ray.origin + ray.direction * castDistance, Color.blue, 0, true);
}
}
}

参考
Orthonormal Bases in Rn - http://ltcconline.net/greenl/courses/203/vectors/orthonormalbases.htm
PhysX 3.3 source code
Create orthonormal basis from a given vector - http://www.mathworks.com/matlabcentral/answers/72631-create-orthonormal-basis-from-a-given-vector
推导相机变换矩阵 - http://blog.csdn.net/popy007/article/details/5120158