Eigen库下载安装并配置到VS
1.简介:
Eigen是一个高层次的C ++库,有效支持线性代数,矩阵和矢量运算,数值分析及其相关的算法。
Eigen适用范围广,支持包括固定大小、任意大小的所有矩阵操作,甚至是稀疏矩阵;支持所有标准的数值类型,并且可以扩展为自定义的数值类型;支持多种矩阵分解及其几何特征的求解;它不支持的模块生态系统 [2] 提供了许多专门的功能,如非线性优化,矩阵功能,多项式解算器,快速傅立叶变换等。Eigen支持多种编译环境,开发人员对库中的实例在多种编译环境下经过测试,以保证其在不同编译环境下的可靠性和实用性。
2.下载:
1.Eigen官网下载。(不知为什么,我电脑一只打不开官网!)
2.GitHub上下载。
3.百度云盘下载.提取码:d0jk
3.安装:
首先,将压缩包解压到本地随意一个盘中。

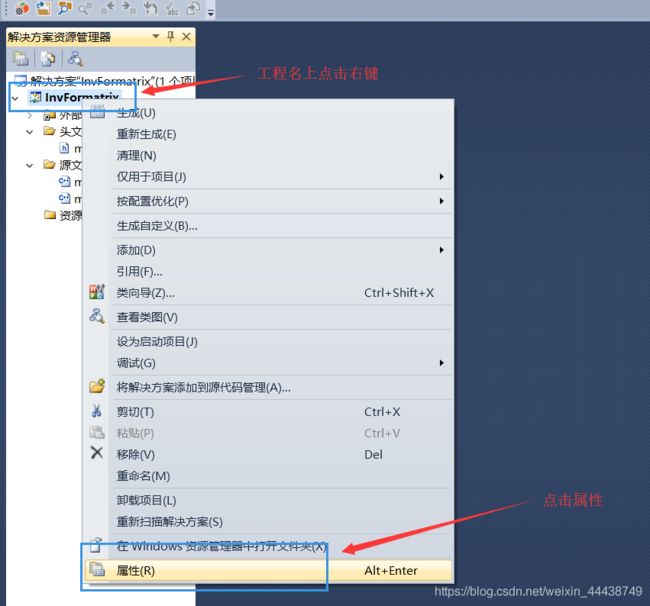
然后,打开VS,我安装的是VS2010,新建一个工程,鼠标放到工程名上点击右键,选择属性:
最后:

4.测试:
#include <iostream>
#include <Eigen/SVD>
#include <Eigen/Core>
using namespace std;
// 利用Eigen库,采用SVD分解的方法求解矩阵伪逆,默认误差er为0
Eigen::MatrixXd pinv_eigen_based(Eigen::MatrixXd & origin, const float er = 0) {
// 进行svd分解
Eigen::JacobiSVD<Eigen::MatrixXd> svd_holder(origin,
Eigen::ComputeThinU |
Eigen::ComputeThinV);
// 构建SVD分解结果
Eigen::MatrixXd U = svd_holder.matrixU();
Eigen::MatrixXd V = svd_holder.matrixV();
Eigen::MatrixXd D = svd_holder.singularValues();
// 构建S矩阵
Eigen::MatrixXd S(V.cols(), U.cols());
S.setZero();
for (unsigned int i = 0; i < D.size(); ++i) {
if (D(i, 0) > er) {
S(i, i) = 1 / D(i, 0);
} else {
S(i, i) = 0;
}
}
return V * S * U.transpose();
}
int main() {
Eigen::MatrixXd B(7,7);
B<<1,2,3,4,5,6,7,
1,2,3,4,5,6,7,
1,2,3,4,5,6,7,
1,2,3,4,5,6,7,
1,2,3,4,5,6,7,
1,2,3,4,5,6,7,
1,2,3,4,5,6,7;
// 打印矩阵B的伪逆矩阵
cout<<B<<endl;
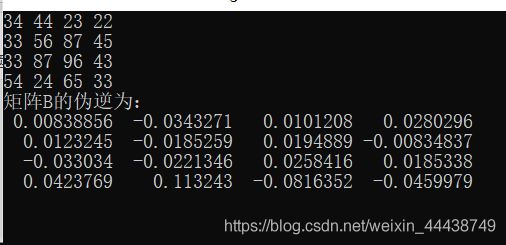
cout << "矩阵B的伪逆为:" << endl;
cout << pinv_eigen_based(B) << endl;
getchar();
}
打印结果:
MATLAB仿真结果:

关于一些使用方法,可以参照:Eigen库使用指南.