SiamFC:用于目标跟踪的全卷积孪生网络 fully-convolutional siamese networks for object tracking
SiamFC网络

图中z代表的是模板图像,算法中使用的是第一帧的ground truth;x代表的是search region,代表在后面的待跟踪帧中的候选框搜索区域;ϕ代表的是一种特征映射操作,将原始图像映射到特定的特征空间,文中采用的是CNN中的卷积层和pooling层;6×6×128代表z经过ϕ后得到的特征,是一个128通道6×6大小feature,同理,22×22×128是x经过ϕ后的特征;后面的×代表卷积操作,让22×22×128的feature被6×6×128的卷积核卷积,得到一个17×17的score map,代表着搜索区域中各个位置与模板相似度值。
算法本身是比较搜索区域与目标模板的相似度,最后得到搜索去区域的score map。其实从原理上来说,这种方法和相关性滤波的方法很相似。其在搜索区域中逐点的目标模板进行匹配,将这种逐点平移匹配计算相似度的方法看成是一种卷积,然后在卷积结果中找到相似度值最大的点,作为新的目标的中心。
上图所画的ϕ其实是CNN中的一部分,并且两个ϕ的网络结构是一样的,这是一种典型的孪生神经网络,并且在整个模型中只有conv层和pooling层,因此这也是一种典型的全卷积(fully-convolutional)神经网络。
在训练模型的时肯定需要损失函数,并通过最小化损失函数来获取最优模型。本文算法为了构造有效的损失函数,对搜索区域的位置点进行了正负样本的区分,即目标一定范围内的点作为正样本,这个范围外的点作为负样本,例如图1中最右侧生成的score map中,红色点即正样本,蓝色点为负样本,他们都对应于search region中的红色矩形区域和蓝色矩形区域。文章采用的是logistic loss,具体的损失函数形式如下:
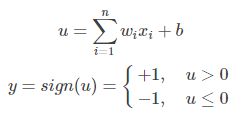
对于score map中了每个点的损失:
![]()
其中v是score map中每个点真实值,y∈{+1,−1}是这个点所对应的标签。
上面的是score map中每个点的loss值,而对于score map整体的loss,则采用的是全部点的loss的均值。即:
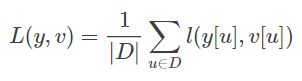
这里的u∈D代表score map中的位置。
整个网络结构类似与AlexNet,但是没有最后的全连接层,只有前面的卷积层和pooling层。

整个网络结构入上表,其中pooling层采用的是max-pooling,每个卷积层后面都有一个ReLU非线性激活层,但是第五层没有。另外,在训练的时候,每个ReLU层前都使用了batch normalization(批规范化是深度学习中经常见到的一种训练方法,指在采用梯度下降法训练DNN时,对网络层中每个mini-batch的数据进行归一化,使其均值变为0,方差变为1,其主要作用是缓解DNN训练中的梯度消失/爆炸现象,加快模型的训练速度),用于降低过拟合的风险。
AlexNet:
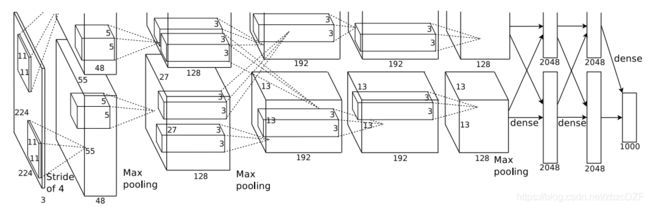
AlexNet为8层结构,其中前5层为卷积层,后面3层为全连接层;学习参数有6千万个,神经元有650,000个。AlexNet在两个GPU上运行;AlexNet在第2,4,5层均是前一层自己GPU内连接,第3层是与前面两层全连接,全连接是2个GPU全连接;
RPN层第1,2个卷积层后;Max pooling层在RPN层以及第5个卷积层后。ReLU在每个卷积层以及全连接层后。
卷积核大小数量:
- conv1:96 11×11×3(个数/长/宽/深度)
- conv2:256 5×5×48
- conv3:384 3×3×256
- conv4: 384 3×3×192
- conv5: 256 3×3×192
ReLU、双GPU运算:提高训练速度。(应用于所有卷积层和全连接层)
重叠pool池化层:提高精度,不容易产生过度拟合。(应用在第一层,第二层,第五层后面)
局部响应归一化层(LRN):提高精度。(应用在第一层和第二层后面)
Dropout:减少过度拟合。(应用在前两个全连接层)
微调(fine-tune)
看到别人一个很好的模型,虽然针对的具体问题不一样,但是也想试试看,看能不能得到很好的效果,而且自己的数据也不多,怎么办?没关系,把别人现成的训练好了的模型拿过来,换成自己的数据,调整一下参数,在训练一遍,这就是微调(fine-tune)。
冻结预训练模型的部分卷积层(通常是靠近输入的多数卷积层),训练剩下的卷积层(通常是靠近输出的部分卷积层)和全连接层。从某意义上来说,微调应该是迁移学习中的一部分。
感知机:PLA
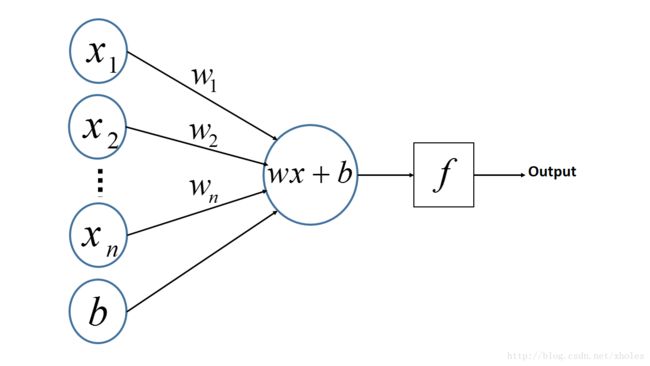
多层感知机是由感知机推广而来,感知机学习算法(PLA: Perceptron Learning Algorithm)用神经元的结构进行描述的话就是一个单独的。
感知机的神经网络表示如下:
多层感知机:MLP
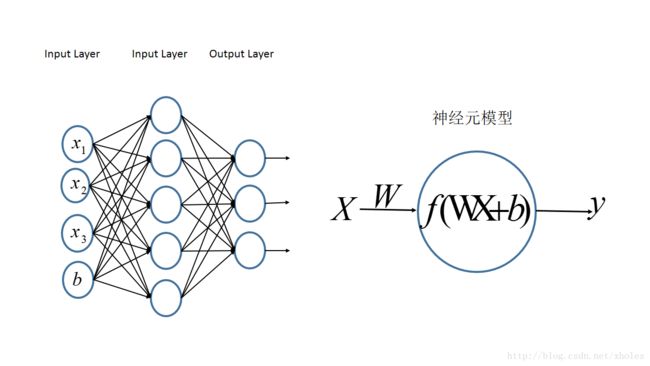
多层感知机的一个重要特点就是多层,我们将第一层称之为输入层,最后一层称之有输出层,中间的层称之为隐层。MLP并没有规定隐层的数量,因此可以根据各自的需求选择合适的隐层层数。且对于输出层神经元的个数也没有限制。
MLP神经网络结构模型如下,本文中只涉及了一个隐层,输入只有三个变量[x1,x2,x3]和一个偏置量b,输出层有三个神经元。相比于感知机算法中的神经元模型对其进行了集成。
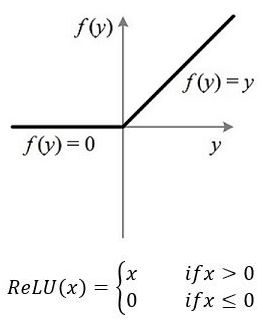
ReLU函数:
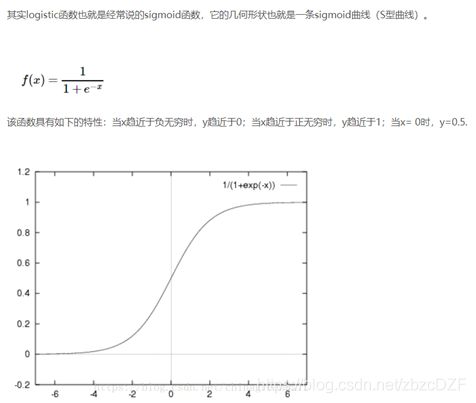
sigmod函数: