【Cocos2d-x】物理引擎使用入门
相关概念
什么是物理引擎?
科学模型:科学研究中对事物的合理简化。
物理引擎是一个计算机程序模拟牛顿力学模型,使用质量、速度、摩擦力和空气阻力等变量。
可以用来预测这种不同情况下的效果。它主要用在科学模拟和电子游戏中。
一般,物理引擎只负责物理计算,而不进行画面渲染。
关于box2d
Box2D是一款免费的开源二维物理引擎,由Erin Catto使用C++编写。它已被用于蜡笔物理学、愤怒的小鸟、地狱边境等游戏的开发。
Cocos2d-x本身已经集成box2d。
以上解释来自维基百科。
Box2D中文手册下载地址:http://pan.baidu.com/s/1o63MI
Box2D源码下载:https://code.google.com/p/box2d/downloads/list
Box2D首页:http://box2d.org/
刚体(body)
在box2d中物体即刚体。
刚体就是坚硬的物体,碰撞不会产生形变。
物体的类型有以下3种:
静态物体:碰撞不会移动。质量为0。如:边界、墙。
动态物体:碰撞会移动。
平台物体:一直保持某一种运动的物体,如电梯会一直保持上下移动。
形状(shape)
依附于刚体的2D碰撞几何结构,形状具有摩擦(friction)和恢复(restitution)的材料性质。
在Box2D中主要有以下两种形状:
1.圆形
2.多边形
一个刚体的形状,可以是由多个形状组合而成。比如:人,头是圆形,手、脚、身体都是矩形。
约束(constraint)
一个约束(constraint)就是消除物体自由度的物理连接。在 2D 中,一个物体有 3 个自由度。如果我们把一个物体钉在墙上(像摆锤那样),那我们就把它约束到了墙上,而且此物体就只能绕着这个钉子旋转,所以这个约束消除了它 2 个自由度。
接触约束(contact constraint)
一个防止刚体穿透,以及用于模拟摩擦(friction)和恢复(restitution)的特殊约束。你永远都不必创建一个接触约束,它们会自动被 Box2D 创建。
关节(joint)
它是一种用于把两个或多个物体固定到一起的约束。Box2D 支持的关节类型有:旋转,棱柱,距离等等。关节可以支持限制(limits)和马达(motors)。
关节限制(joint limit)
一个关节限制(joint limit)限定了一个关节的运动范围。例如人类的胳膊肘只能做某一范围角度的运
动。
关节马达(joint motor)
一个关节马达能依照关节的自由度来驱动所连接的物体。例如,你可以使用一个马达来驱动一个肘的
旋转。
夹具(fixture)
刚体物理信息(如:类型、密度系数、摩擦系数)的封装。
一个刚体可以具有多个夹具。
每一个夹具都对应一个形状。
摩擦
摩擦可以使对象逼真地沿其它对象滑动。Box2D 支持静摩擦和动摩擦,但使用相同的参数。摩擦在Box2D 中会被正确地模拟,并且摩擦力的强度与正交力(称之为库仑摩擦)成正比。摩擦参数经常会设置在 0 到 1 之间,0 意味着没有摩擦,1 会产生强摩擦。
恢复
恢复可以使对象弹起,想象一下,在桌面上方丢下一个小球。恢复的值通常设置在 0 到 1 之间,0 的意思是小球不会弹起,这称为非弹性碰撞;1 的意思是小球的速度会得到精确的反射,这称为完全弹性碰撞。
密度
Box2D 可以根据附加形状的质量分配来计算物体的质量以及转动惯量。直接指定物体质量常常会导致不协调的模拟。因此,推荐的方法是使用 b2Body::SetMassFromShape 来根据形状设置质量。
世界(world)
世界就是一个封闭的多边形。一般世界的大小和屏幕的大小一样。处于世界中的物体才会进行计算,这是为了提高效率。
世界也是物体,是形状和约束相互作用的集合。
以上概述来自Box2D中文手册。
在Cocos2d-x中使用Box2D
说明
开发环境说明:
引擎版本:Cocos2d-x2.2.1
开发工具:VS2012
系统:win7
工程配置
1.启用Box2D:工程上右键——C/C++——预处理器——预处理器定义——编辑——添加宏(CC_ENABLE_BOX2D_INTEGRATION)

注意:Cocos2d-x中集成了Box2D和Chipmunk,但是这两个物理引擎不能同时使用。启用chipmunk的宏定义(CC_ENABLE_CHIPMUNK_INTEGRATION)
2.修改libExternsions项目的预处理指令CC_ENABLE_CHIPMUNK_INTEGRATION为CC_ENABLE_BOX2D_INTEGRATION 
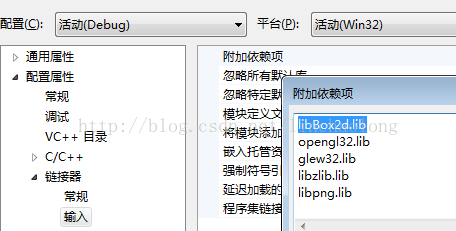
3.链接box2d库(libBox2d.lib)
Cocos2d-x2.2.6的一个bug
运行TestCpp中的Box2dTest时,当添加若干个方块后会报如下错误。

缩放因子
Box2D中使用米、千克、秒作单位。但是一般作画面渲染时都是以像素为单位的。
比如,我们在屏幕渲染一个宽为32像素的精灵,但是在物理空间中如何表示它的宽呢?
这时,就需要定义一个缩放因子用于将像素值转换为物理空间的值。
把像素/米比率设置为32是一个比较合适的值,所以定义缩放因子的值为32.
// 定义缩放因子
#define PTM_RATIO 32创建物理世界
在CCLayer初始化的时候,初始化物理世界。
// 创建一个世界
b2Vec2 gravity(0,-10); // 设置世界的横向和垂直重力速度,正常重力加速度约等于9.8,这里取10是出于效率考虑
pWorld = new b2World(gravity);
// 告诉世界(world)当物体停止移动时允许物体休眠。一个休眠中的物体不需要任何模拟。
pWorld->SetAllowSleeping(true);
// 在Box2D中世界也是一个物体(刚体),所以通过创建一个刚体来定义世界的位置和大小
// 1.定义世界的位置
b2BodyDef worldDef;
worldDef.position.Set(VisibleRect::leftBottom().x,VisibleRect::leftBottom().y); //设置世界的位置在屏幕左下角
// 创建刚体,这个刚体已经被添加到世界
b2Body* groundBody = pWorld->CreateBody(&worldDef);
// 2.定义世界的边界
// 定义边界盒子,b2EdgeShape是通过设置一条条线段来组成一个多边形
b2EdgeShape groundBox;
// 底边(两点一线)
groundBox.Set(b2Vec2(VisibleRect::leftBottom().x/PTM_RATIO,VisibleRect::leftBottom().y/PTM_RATIO), b2Vec2(VisibleRect::rightBottom().x/PTM_RATIO,VisibleRect::rightBottom().y/PTM_RATIO));
// 创建夹具(夹具是用于记录物体信息),实际上是把我们上面定义的线创建出来
groundBody->CreateFixture(&groundBox,0); //参数1为形状,参数2为密度(Box2D 可以根据附加形状的质量分配来计算物体的质量以及转动惯量)
// 顶边
groundBox.Set(b2Vec2(VisibleRect::leftTop().x/PTM_RATIO,VisibleRect::leftTop().y/PTM_RATIO), b2Vec2(VisibleRect::rightTop().x/PTM_RATIO,VisibleRect::rightTop().y/PTM_RATIO));
groundBody->CreateFixture(&groundBox,0);
// 左边
groundBox.Set(b2Vec2(VisibleRect::leftTop().x/PTM_RATIO,VisibleRect::leftTop().y/PTM_RATIO), b2Vec2(VisibleRect::leftBottom().x/PTM_RATIO,VisibleRect::leftBottom().y/PTM_RATIO));
groundBody->CreateFixture(&groundBox,0);
// 右边
groundBox.Set(b2Vec2(VisibleRect::rightBottom().x/PTM_RATIO,VisibleRect::rightBottom().y/PTM_RATIO), b2Vec2(VisibleRect::rightTop().x/PTM_RATIO,VisibleRect::rightTop().y/PTM_RATIO));
groundBody->CreateFixture(&groundBox,0);
// 迭代次数的设置
static const int velocityIterations = 8; // 速度迭代次数
static const int positionIterations = 1; // 位置迭代次数
void Box2DTest::update(float dt)
{
//更少的迭代会增加性能并降低精度,同样地,更多的迭代会减少性能但提高模拟质量。
// 调用Step方法遍历一次物理世界里的所有对象
pWorld->Step(dt, velocityIterations, positionIterations);
}
刚体与CCSprite绑定
Cocos2d-x中已经封装了一个用于物理引擎的CCSprite,就是CCPhysicsSprite,这个类就定义在扩展库中。#include "cocos-ext.h"就可以使用了。通过setB2Body方法与刚体进行关联。
// 1. 创建刚体
// 刚体定义
b2BodyDef bodyDef;
// 设置刚体类型为动态刚体
bodyDef.type = b2_dynamicBody;
// 设置刚体位置(注意:需要转换为物理空间单位,除以缩放因子)
bodyDef.position.Set(p.x/PTM_RATIO, p.y/PTM_RATIO);
// 创建刚体
b2Body *body = pWorld->CreateBody(&bodyDef);
// 2.定义刚体的形状(多边形)
b2PolygonShape dynamicBox;
// 通过b2PolygonShape定义一个简单的矩形
dynamicBox.SetAsBox(.5f, .5f);//设置矩形的中心点,Box2D会根据该形状所依附的刚体的计算矩形的尺寸。
// 3.夹具定义
b2FixtureDef fixtureDef;
// 夹具形状
fixtureDef.shape = &dynamicBox;
// 密度系数
fixtureDef.density = 1.0f;
// 摩擦系数
fixtureDef.friction = 0.3f;
body->CreateFixture(&fixtureDef);
CCNode *parent = this->getChildByTag(kTagParentNode);
// 有一张64x64的精灵表,精灵表中有4个不同的32x32的图片,随机挑选其中一张
int idx = (CCRANDOM_0_1() > .5 ? 0:1);
int idy = (CCRANDOM_0_1() > .5 ? 0:1);
// 4. 刚体与精灵绑定
// 创建物理精灵
CCPhysicsSprite *sprite = CCPhysicsSprite::createWithTexture(m_pSpriteTexture,CCRectMake(32 * idx,32 * idy,32,32));
// 物理精灵与刚体关联后,当调用世界的Step方法时就会更新精灵的位置,不需要手动更新
sprite->setB2Body(body);
// 设置缩放比例因子
sprite->setPTMRatio(PTM_RATIO);
// 设置精灵位置
sprite->setPosition( ccp( p.x, p.y) );//注意:一定要先调用setB2Body
// 添加到屏幕
parent->addChild(sprite);
调试绘图
b2Draw定义了用于绘制相关物理信息的接口,只需要实现这些接口。并调用世界(world)的SetDebugDraw方法关联DebugDraw。
DebugDraw在Cocos2d-x中已经有相关实现,就在cocos2d-x-2.2.1\samples\Cpp\TestCpp\Classes\Box2DTestBed目录下的GLES-Render.cpp和GLES-Render.h。
1.把GLES-Render.cpp和GLES-Render.h拷贝到工程Classes目录下。
2.包含头文件。
#ifdef _DEBUG
#include "GLES-Render.h"
#endif3.在创建世界的时候,创建DebugDraw,设置Debug标记并关联到世界。并重写CCLayer的draw方法,绘制调试信息。
// 绘制调试信息
#ifdef _DEBUG
// 创建DebugDraw,构造函数需要传递缩放比例因子
m_debugDraw = new GLESDebugDraw( PTM_RATIO );
// 世界关联DebugDraw
pWorld->SetDebugDraw(m_debugDraw);
// Debug标记
uint32 flags = 0;
flags += b2Draw::e_shapeBit; //绘制形状
flags += b2Draw::e_jointBit; //绘制关节
flags += b2Draw::e_aabbBit; //绘制碰撞盒子
flags += b2Draw::e_pairBit; //绘制潜在接触
flags += b2Draw::e_centerOfMassBit; //绘制质点
// 设置Debug标记
m_debugDraw->SetFlags(flags);
#endif
void Box2DTest::draw()
{
// 调用父类draw方法
CCLayer::draw();
#if _DEBUG
// 顶点属性(位置、颜色、纹理坐标)
ccGLEnableVertexAttribs( kCCVertexAttribFlag_Position );
kmGLPushMatrix();
// 绘制Debug数据
pWorld->DrawDebugData();
kmGLPopMatrix();
#endif
}4.在析构函数中释放debugDraw占用的内存。
Box2DTest::~Box2DTest(){
CC_SAFE_DELETE(pWorld);
CC_SAFE_DELETE(m_debugDraw);
}
1.当物体受力的时候(碰撞、挤压或下落),碰撞盒子的颜色会变成粉红色,默认为青色。
2.最外边的是刚体的形状。
注意:建议先把缩放因子的值设置为64,然后再调试,这样便于观察,因为缩放因子为32时,碰撞盒子的大小和精灵的大小一样。
示例工程地址:https://coding.net/u/linchaolong/p/Cocos2d-x_HelloBox2D/git 【点击下载源码】