STM32部分知识之SPI原理与配置
SPI接口简介:(同样是基于正点原子F4)
SPI 是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。是Motorola首先在其MC68HCXX系列处理器上定义的。
SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,主要应用在 EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。
PI接口框图

SPI内部结构简明图
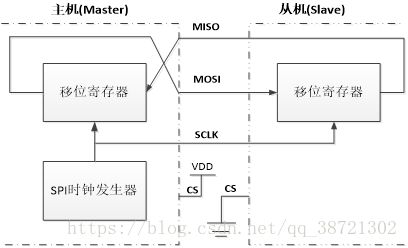
SPI接口一般使用4条线通信:
MISO 主设备数据输入,从设备数据输出。
MOSI 主设备数据输出,从设备数据输入。
SCLK时钟信号,由主设备产生。
CS从设备片选信号,由主设备控制
SPI工作原理总结
①硬件上为4根线。
②主机和从机都有一个串行移位寄存器,主机通过向它的SPI串行寄存器写入一个字节来发起一次传输。
③串行移位寄存器通过MOSI信号线将字节传送给从机,从机也将自己的串行移位寄存器中的内容通过MISO信号线返回给主机。这样,两个移位寄存器中的内容就被交换。
④外设的写操作和读操作是同步完成的。如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输。

STM32 SPI接口可配置为支持SPI协议或者支持I2S音频协议,默认是SPI模式。可以通过软件切换到I2S方式。





SPI引脚配置(3个SPI)
哪些引脚可以复用为SPIx的相应功能引脚,需要查数据手册。(以下部分从数据手册上截图的)


下面进入正题:
常用寄存器
lSPI控制寄存器1(SPI_CR1)
lSPI控制寄存器2(SPI_CR2)
lSPI状态寄存器(SPI_SR)
lSPI数据寄存器(SPI_DR)
lSPI_I2S配置寄存器(SPI_I2S_CFGR)
lSPI_I2S预分频寄存器(SPI_I2SPR)
SPI相关库函数:
stm32f4xx_spi.c/stm32f4xx_spi.h
SPI相关库函数:
void SPI_I2S_DeInit(SPI_TypeDef* SPIx);
void SPI_Init(SPI_TypeDef* SPIx, SPI_InitTypeDef* SPI_InitStruct);
void SPI_Cmd(SPI_TypeDef* SPIx, FunctionalState NewState);
void SPI_I2S_ITConfig(SPI_TypeDef* SPIx, uint8_t SPI_I2S_IT, FunctionalState NewState);
void SPI_I2S_DMACmd(SPI_TypeDef* SPIx, uint16_t SPI_I2S_DMAReq, FunctionalState NewState);
void SPI_I2S_SendData(SPI_TypeDef* SPIx, uint16_t Data);
uint16_t SPI_I2S_ReceiveData(SPI_TypeDef* SPIx);
void SPI_DataSizeConfig(SPI_TypeDef* SPIx, uint16_t SPI_DataSize);
FlagStatus SPI_I2S_GetFlagStatus(SPI_TypeDef* SPIx, uint16_t SPI_I2S_FLAG);
void SPI_I2S_ClearFlag(SPI_TypeDef* SPIx, uint16_t SPI_I2S_FLAG);
ITStatus SPI_I2S_GetITStatus(SPI_TypeDef* SPIx, uint8_t SPI_I2S_IT);
void SPI_I2S_ClearITPendingBit(SPI_TypeDef* SPIx, uint8_t SPI_I2S_IT);
程序配置过程:
①使能SPIx和IO口时钟
RCC_AHBxPeriphClockCmd() / RCC_APBxPeriphClockCmd();②初始化IO口为复用功能
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);③设置引脚复用映射:
GPIO_PinAFConfig();②初始化SPIx,设置SPIx工作模式
void SPI_Init(SPI_TypeDef* SPIx, SPI_InitTypeDef* SPI_InitStruct);③使能SPIx
void SPI_Cmd(SPI_TypeDef* SPIx, FunctionalState NewState);④SPI传输数据
void SPI_I2S_SendData(SPI_TypeDef* SPIx, uint16_t Data);
uint16_t SPI_I2S_ReceiveData(SPI_TypeDef* SPIx) ;
⑤查看SPI传输状态
SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE);硬件连接:


相关程序:
SPI初始化函数:
void SPI1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);//使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);//使能SPI1时钟
//PB3,4,5初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5;//PB3~5复用功能输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化
GPIO_PinAFConfig(GPIOB,GPIO_PinSource3,GPIO_AF_SPI1); //PB3复用为SPI1
GPIO_PinAFConfig(GPIOB,GPIO_PinSource4,GPIO_AF_SPI1); //PB4复用为SPI1
GPIO_PinAFConfig(GPIOB,GPIO_PinSource5,GPIO_AF_SPI1); //PB5复用为SPI1
//这里只针对SPI口初始化
RCC_APB2PeriphResetCmd(RCC_APB2Periph_SPI1,ENABLE);//复位SPI1
RCC_APB2PeriphResetCmd(RCC_APB2Periph_SPI1,DISABLE);//停止复位SPI1
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;//设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI工作模式:设置为主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI的数据大小:SPI发送接收8位帧
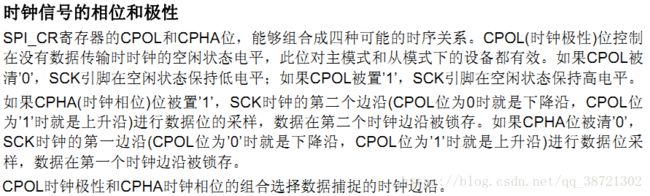
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //串行同步时钟的空闲状态为高电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //串行同步时钟的第二个跳变沿(上升或下降)数据被采样
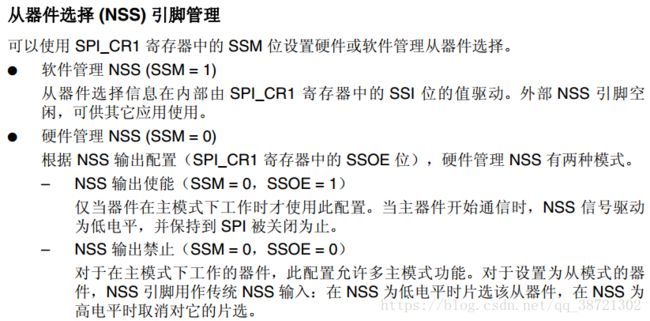
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号由SSI控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //定义波特率预分频的值:波特率预分频值为256
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式
SPI_Init(SPI1, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器
SPI_Cmd(SPI1, ENABLE); //使能SPI外设
SPI1_ReadWriteByte(0xff);//启动传输
} SPI速度设置函数:
//SPI1速度设置函数
//SPI速度=FAPB2/分频系数
//@ref SPI_BaudRate_Prescaler:SPI_BaudRatePrescaler_2~SPI_BaudRatePrescaler_256
//fAPB2时钟一般为84Mhz
void SPI1_SetSpeed(u8 SPI_BaudRatePrescaler)
{
assert_param(IS_SPI_BAUDRATE_PRESCALER(SPI_BaudRatePrescaler));//判断有效性
SPI1->CR1&=0XFFC7;//位3-5清零,用来设置波特率
SPI1->CR1|=SPI_BaudRatePrescaler; //设置SPI1的速度
SPI_Cmd(SPI1,ENABLE); //使能SPI1
} PI读写一个字节:
//SPI1 读写一个字节
//TxData:要写入的字节
//返回值:读取到的字节
u8 SPI1_ReadWriteByte(u8 TxData)
{
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET){}//等待发送区空
SPI_I2S_SendData(SPI1, TxData); //通过外设SPIx发送一个byte数据
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET){} //等待接收完一个byte
return SPI_I2S_ReceiveData(SPI1); //返回通过SPIx最近接收的数据
}关于W25Q128的相关函数我会在下一个博客粘贴出来