《信号与系统》第二章 常用信号及LTI系统的时域分析
第二章 常用信号及LTI系统的时域分析
- 2.1 常用信号及其基本特性
- 2.1.1 复指数信号
- 一、连续时间复指数信号
- 二、离散时间复指数信号
- 2.1.2 单位阶跃信号
- 一、连续时间单位阶跃信号
- 二、离散时间单位阶跃信号
- 2.1.3 连续时间单位冲激信号
- 2.1.4 离散时间单位样值信号
- 2.2 信号的时域运算
- 2.2.1 信号的微积分运算
- 2.2.2 信号的展缩、翻转、平移
- 一、连续时间信号的展缩、翻转、平移
- 二、离散时间信号的展缩、翻转、平移
- 2.2.2 信号的分解
- 2.3 卷积积分、卷积和
- 2.3.1 卷积的定义
- 2.3.2 卷积的图解法
- 2.3.3 卷积的性质
- 1. 卷积代数
- 2. 冲激信号的卷积特性
- 3.卷积的微分特性
- 4.卷积的积分特性
- 5.卷积的求和特性
- 2.4 连续时间系统的时域分析
- 2.4.1 连续时间系统的数学模型——微分方程
- 1. 微分方程的基本形式:
- 2. 微分方程的求解方法
- 3. 单位冲激响应
- 4. 零状态响应
- 5.响应模式分析
- 6. 系统的稳定性和因果性分析
2.1 常用信号及其基本特性
在数字信号处理与系统分析领域中,有着大量复杂的信号,而这些信号基本都是由一些常用信号组成的,常用的信号主要有以下几种:
- 连续及离散时间复指数信号
- 连续及离散时间阶跃信号
- 连续时间冲激信号
- 离散时间单位样值信号
2.1.1 复指数信号
一、连续时间复指数信号
形如
x ( t ) = e s t ( − ∞ < t < ∞ , s = σ + j ω ) x\left( t\right) =e^{st}(-\infty
的信号,称为连续时间复指数信号,根据参数的取值不同,还可以将复指数信号分为下列几个种类:
| 信号种类 | 参数取值 | 时间函数 |
|---|---|---|
| 直流信号 | σ=0, ω=0 | x ( t ) = 1 x(t)=1 x(t)=1 |
| 实指数信号 | σ≠0, ω=0 | x ( t ) = e σ t x(t)=e^{σt} x(t)=eσt |
| 虚指数信号 | σ=0, ω≠0 | x ( t ) = c o s ( ω t ) + j s i n ( ω t ) x(t)=cos(ωt)+jsin(ωt) x(t)=cos(ωt)+jsin(ωt) |
| 复指数信号 | σ≠0, ω≠0 | x ( t ) = e σ t c o s ( ω t ) + j e σ t s i n ( ω t ) x(t)=e^{σt}cos(ωt)+je^{σt}sin(ωt) x(t)=eσtcos(ωt)+jeσtsin(ωt) |
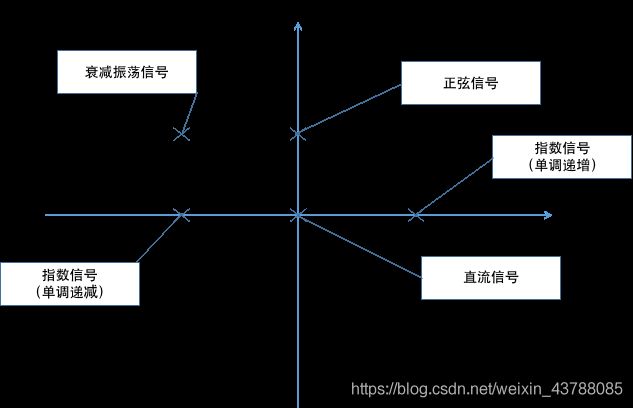
根据上表可知,σ和ω的取值(s的取值)直接决定了复指数信号的种类,在数学上,将σOω坐标面称为s平面,因此有序数对(σ,ω)在s平面中所处的位置决定了复指数信号的类型,具体情况如下:
| 位置(σ,ω) (σ>0,ω>0) | 信号种类 |
|---|---|
| 原点(0,0) | 直流信号 |
| σ轴正半轴(σ,0) | 指数信号(单调递增) |
| 第二象限(-σ,ω) | 衰减振荡信号 |
| σ轴负半轴(-σ,0) | 指数信号(单调递增) |
二、离散时间复指数信号
而在时间离散的情况下,形如
x [ n ] = z n = ( r e j Ω ) n = r n e j Ω n ( z = r e j Ω , − ∞ < n < + ∞ ) x\left[ n\right] =z^{n}=\left( re^{j\Omega }\right) ^{n}=r^{n}e^{j\Omega n}(z=re^{j\Omega},-\infty
的信号,称为离散时间复指数信号或复指数序列,其中r为复数z的模,Ω为幅角
复指数序列中的z与连续复指数信号中的s性质较为类似,s常采用直角坐标系s=σ+jω的方法表示,而z则常使用极坐标的方式进行表示,二者均属于复常数,因此根据r和Ω的取值,复指数序列同样也可以分为多个种类:
| 信号种类 | 参数取值 | 时间函数 |
|---|---|---|
| 实指数序列(单调递增) | Ω=0 | x [ n ] = r n x[n]=r^n x[n]=rn |
| 实指数序列(单调递减) | Ω=π | x [ n ] = ( − r ) n x[n]=(-r)^n x[n]=(−r)n |
| 虚指数序列 | r=1 | x [ n ] = e j Ω n = c o s [ Ω n ] + j s i n [ Ω n ] x[n]=e^{jΩn}=cos[Ωn]+jsin[Ωn] x[n]=ejΩn=cos[Ωn]+jsin[Ωn] |
| 复指数序列 | x [ n ] = r n c o s [ Ω n ] + j r n s i n [ Ω n ] x[n]=r^ncos[Ωn]+jr^nsin[Ωn] x[n]=rncos[Ωn]+jrnsin[Ωn] |
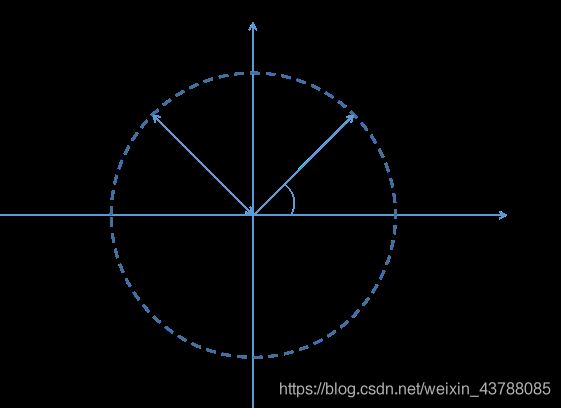
以复数z的实部Re[z]为横轴,虚部j·Im[z]作为纵轴,建立z平面,可知:
|z|<1(单位圆内),对应指数衰减振荡序列;
|z|=1(单位圆上),对应正弦序列;
|z|>1(单位圆外),对应指数增长振荡序列。
2虚指数序列的实部是正弦序列,其数学表达式为: x [ n ] = cos [ Ω 0 ⋅ n + φ ] x\left[ n\right] =\cos \left[ \Omega _{0}\cdot n+\varphi \right] x[n]=cos[Ω0⋅n+φ],时间连续正弦信号可转化为正弦序列: x ( t ) = cos ( ω 0 ⋅ t + φ ) ⟶ t = n T x [ n ] = c o s [ ω 0 n T + φ ] x\left( t\right) =\cos \left( \omega_{0} \cdot t+\varphi \right)\stackrel{t=nT}{\longrightarrow}x[n] = cos[ \omega_{0}nT+\varphi] x(t)=cos(ω0⋅t+φ)⟶t=nTx[n]=cos[ω0nT+φ],此处Ω0与ω0分别为离散时间和连续时间的基本角频率,此处的T为离散时间的采样间隔,通常采样间隔恒定不变。由此可得Ω0与ω0的关系为:
Ω 0 = ω 0 T = ω 0 f s = 2 π f 0 f s \Omega _{0}=\omega_{0}T=\dfrac{\omega_{0}}{f_{s}}=2\pi \dfrac{f_{0}}{f_{s}} Ω0=ω0T=fsω0=2πfsf0
其中
ω 0 — — 模 拟 角 频 率 ( r a d / s ) \qquad ω_{0}——模拟角频率(rad/s) ω0——模拟角频率(rad/s)
Ω 0 — — 数 字 域 频 率 ( r a d ) \qquad Ω_{0}——数字域频率(rad) Ω0——数字域频率(rad)
T — — 采 样 频 率 ( s ) \qquad T——采样频率(s) T——采样频率(s)
f 0 — — 模 拟 频 率 ( H z ) \qquad f_{0}——模拟频率(Hz) f0——模拟频率(Hz)
f s — — 采 样 频 率 ( H z ) \qquad f_{s}——采样频率(Hz) fs——采样频率(Hz)
因此,数字域频率Ω是模拟角频率ω对采样频率的归一化。
2.1.2 单位阶跃信号
一、连续时间单位阶跃信号
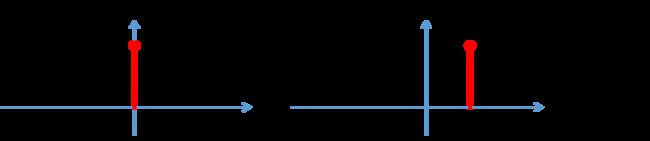
定义一个连续时间信号,该信号在t=0之前信号的数值均为0,在t=0之后均为1,则称该信号为连续时间单位阶跃信号,其定义的符号表达式如下:
u ( t ) = { 1 , t > 0 0 , t < 0 u\left( t\right) =\begin{cases}1,t >0\\ 0,t <0\end{cases} u(t)={1,t>00,t<0
将该定义推广,得:
A u ( t − t 0 ) = { A , t > t 0 0 , t < t 0 Au\left( t-t_{0}\right) =\begin{cases}A,t >t_{0}\\ 0,t

在实际应用中,单位阶跃信号常用于表示电源开关的接入状态,也常用于表示其他信号,比如:
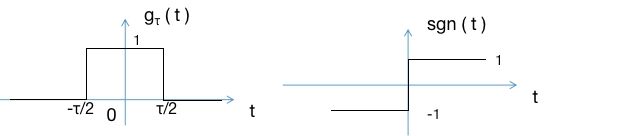
矩形脉冲:指阶跃时间远小于顶部持续时间的平顶脉冲,常用单位阶跃信号进行表示:
g τ ( t ) = u ( t + τ 2 ) − u ( t − τ 2 ) g_{\tau }\left( t\right) =u\left( t+\dfrac{\tau }{2}\right) -u\left( t-\dfrac{\tau }{2}\right) gτ(t)=u(t+2τ)−u(t−2τ)
符号函数:当t>0时数值为1,t<0时数值为-1的函数称为符号函数,对任意函数f(t),都有f(t)=sgn(t)·|f(t)|,其符号表达式表示为:
s g n ( t ) = { 1 , t > 0 − 1 , t < 0 = u ( t ) − u ( − t ) = 2 ⋅ u ( t ) − 1 sgn\left( t\right) =\begin{cases}1,t >0\\ -1,t <0\end{cases}=u(t)-u(-t)=2·u(t)-1 sgn(t)={1,t>0−1,t<0=u(t)−u(−t)=2⋅u(t)−1
二、离散时间单位阶跃信号
与连续时间单位阶跃信号类似,离散时间单位阶跃信号(或称单位阶跃序列)在n=0之前信号的数值均为0,在n=0之后均为1,但是有所不同的是,连续时间单位阶跃信号在t=0上没有定义,而单位阶跃序列在n=0时取常数1,符号表达式为:
u [ n ] = { 1 , n ≥ 0 0 , n < 0 u\left[ n\right] =\begin{cases}1,n ≥0\\ 0,n <0\end{cases} u[n]={1,n≥00,n<0
类似的,将单位阶跃序列推广,可得:
A u [ n − k ] = { A , n ≥ k 0 , n < k Au\left[ n-k\right] =\begin{cases}A,n ≥ k\\ 0,n
2.1.3 连续时间单位冲激信号
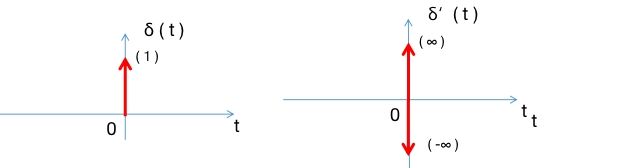
当矩阵脉冲从-τ/2到τ/2的积分为1,宽度τ无限趋近于0,高度1/τ趋近于无穷大时,该信号的作用时间极短,相应物理量极大。数学上称这一类信号为连续时间单位冲激信号,其数学定义为:
δ ( t ) = { δ ( t ) = 0 , t ≠ 0 ∫ − ∞ ∞ δ ( t ) d t = 1 \delta \left( t\right) =\begin{cases}\delta \left( t\right) =0,t\neq 0\\\\ \int _{-\infty }^{\infty }\delta \left( t\right) dt=1\end{cases} δ(t)=⎩⎪⎨⎪⎧δ(t)=0,t=0∫−∞∞δ(t)dt=1
推广为:
A δ ( t ) = { A δ ( t ) = 0 , t ≠ 0 ∫ − ∞ ∞ A δ ( t ) d t = A A\delta \left( t\right) =\begin{cases}A\delta \left( t\right) =0,t\neq 0\\\\ \int _{-\infty }^{\infty }A\delta \left( t\right) dt=A\end{cases} Aδ(t)=⎩⎪⎨⎪⎧Aδ(t)=0,t=0∫−∞∞Aδ(t)dt=A

连续时间单位冲激信号主要有以下性质:
-
筛选性:设x(t)为在t0处连续的普通函数,则有:
x ( t ) δ ( t − t 0 ) = x ( t 0 ) δ ( t − t 0 ) x(t)\delta \left( t-t_{0}\right)=x(t_{0})\delta \left( t-t_{0}\right) x(t)δ(t−t0)=x(t0)δ(t−t0)
该式表明,通过信号x(t)与冲激函数δ(t-t0)相乘,可筛选出连续时间信号x(t)在t0处的函数值x(t0),其相乘结果仍为冲激信号,在t0瞬间数值仍趋于无穷大,但冲激强度由 1 变为x(t0)。
-
取样性:设x(t)为在t0处连续的普通函数,则有:
∫ − ∞ ∞ x ( t ) δ ( t − t 0 ) d t = x ( t 0 ) \int _{-\infty }^{\infty }x(t)\delta \left( t-t_{0}\right) dt=x(t_{0}) ∫−∞∞x(t)δ(t−t0)dt=x(t0)
该式表明,通过信号x(t)与冲激函数δ(t-t0)相乘,并在时间域 (-∞,+∞) 上积分,可得到x(t)在t0处的取值x(t0)。一个普通函数x(t)与冲激函数δ(t)乘积下的面积等于x(t)在冲激瞬间的值。
-
展缩性: δ ( a t + b ) = 1 ∣ a ∣ δ ( t + b a ) \delta \left( at+b\right) =\dfrac{1}{\left| a\right| }\delta \left( t+\dfrac{b}{a}\right) δ(at+b)=∣a∣1δ(t+ab)
证明如下:
∫ − ∞ ∞ δ ( a t + b ) f ( t ) d t = τ = a t + b 1 ∣ a ∣ ∫ − ∞ ∞ δ ( τ ) f ( τ − b a ) d τ = 1 ∣ a ∣ f ( − b a ) \quad\int _{-\infty }^{\infty }\delta \left( at+b\right) f\left( t\right) dt\xlongequal {\tau = at+b}\dfrac{1}{\left| a\right| }\int _{-\infty }^{\infty }\delta \left( \tau\right) f\left( \dfrac{\tau -b}{a}\right) d\tau =\dfrac{1}{\left| a\right| }f\left( -\dfrac{b}{a}\right) ∫−∞∞δ(at+b)f(t)dtτ=at+b∣a∣1∫−∞∞δ(τ)f(aτ−b)dτ=∣a∣1f(−ab)
= ∫ − ∞ ∞ 1 ∣ a ∣ δ ( t + b a ) f ( t ) d t = 1 ∣ a ∣ f ( − b a ) =\int _{-\infty }^{\infty }\dfrac{1}{\left| a\right| }\delta \left( t+\dfrac{b}{a}\right) f\left( t\right) dt=\dfrac{1}{\left| a\right| }f\left( -\dfrac{b}{a}\right) =∫−∞∞∣a∣1δ(t+ab)f(t)dt=∣a∣1f(−ab)
∴ δ ( a t + b ) = 1 ∣ a ∣ δ ( t + b a ) \therefore \delta \left( at+b\right) =\dfrac{1}{\left| a\right| }\delta \left( t+\dfrac{b}{a}\right) ∴δ(at+b)=∣a∣1δ(t+ab)根据这一性质,令a=-1、b=0,可得δ(-t)=δ(t),因此冲激信号δ(t)是偶函数。
连续时间单位冲激信号可由连续时间单位阶跃信号经微分得到:
δ ( t ) = d d t u ( t ) \delta \left( t\right)=\dfrac{d}{dt}u\left( t\right) δ(t)=dtdu(t)
也就是说通过对单位冲激信号积分为可得到单位阶跃信号:
∫ − ∞ t δ ( τ ) d τ = u ( t ) \int _{-\infty }^{t}\delta \left( \tau \right) d\tau =u\left( t\right) ∫−∞tδ(τ)dτ=u(t)
单位冲激信号的微分称为冲激偶信号,由微分的性质可以得出冲击偶信号属于奇函数,对冲击偶信号进一步求微分可得高阶冲激信号。
2.1.4 离散时间单位样值信号
定义一个离散时间信号,该信号仅在n=0时数值为1,在n≠0时数值均为0,则称该信号为离散时间单位样值信号,又称为单位样值序列,其定义的符号表达式如下:
δ [ n ] = { 1 , n = 0 0 , n ≠ 0 \delta \left[ n\right] =\begin{cases}1,n =0\\ 0,n ≠ 0\end{cases} δ[n]={1,n=00,n=0
将该定义推广,得:
δ [ n − k ] = { 1 , n = k 0 , n ≠ k \delta \left[ n-k\right] =\begin{cases}1,n =k\\ 0,n ≠ k\end{cases} δ[n−k]={1,n=k0,n=k
对于任意一个离散时间信号,都可以使用δ[n]及δ[n-k]的线性加权和表示
x [ n ] = ∑ k = − ∞ ∞ x [ k ] δ [ n − k ] x\left[ n\right] =\sum ^{\infty }_{k=-\infty }x\left[ k\right] \delta \left[ n-k\right] x[n]=k=−∞∑∞x[k]δ[n−k]
例如下图
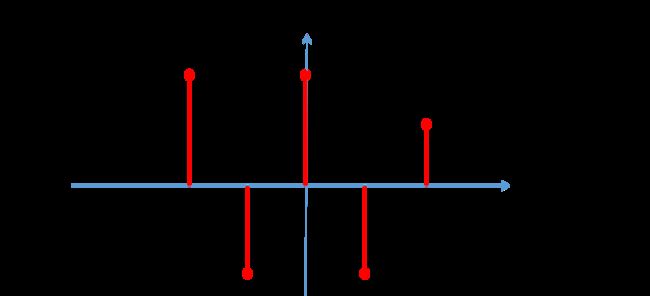
可表示为:x[n]=x[-2]·δ[n+2] + x[-1]·δ[n+1] + x[0]·δ[n] + x[1]·δ[n-1] + x[2]·δ[n-2]
对比单位阶跃序列,很容易发现单位样值序列可由单位阶跃序列的差分得到,其符号表达式为
δ [ n ] = u [ n ] − u [ n − 1 ] δ[n]=u[n]-u[n-1] δ[n]=u[n]−u[n−1]
2.2 信号的时域运算
2.2.1 信号的微积分运算
信号的微分: d d t x ( t ) = x ′ ( t ) \dfrac{d}{dt}x\left( t\right) =x'\left( t\right) dtdx(t)=x′(t)
信号的积分: x ( − 1 ) ( t ) = ∫ − ∞ t x ( τ ) d τ x^{\left( -1\right) }\left( t\right) =\int _{-\infty }^{t}x\left( \tau \right) d\tau x(−1)(t)=∫−∞tx(τ)dτ
2.2.2 信号的展缩、翻转、平移
一、连续时间信号的展缩、翻转、平移
- 平移: x(t) → x(t+b) b > 0 时,左移;b < 0 时,右移。
- 翻转: x(t) → x(-t) 波形以纵轴为轴左右翻转。
- 展缩:(尺度变换) x(t)→x(at)
a > 0 时 , t ∈ [ t 1 , t 2 ] → t ∈ [ t 1 a , t 2 a ] \qquad a>0时,t\in \left[ t_{1},t_{2}\right] \rightarrow t\in \left[ \dfrac{t_{1}}{a},\dfrac{t_{2}}{a}\right] a>0时,t∈[t1,t2]→t∈[at1,at2]
若 a > 1 , 波 形 被 压 缩 为 原 来 的 1 a \\\qquad 若a>1,波形被压缩为原来的\dfrac{1}{a} 若a>1,波形被压缩为原来的a1
若 a < 1 , 波 形 被 扩 展 为 原 来 的 a 倍 \\\qquad 若a<1,波形被扩展为原来的a倍 若a<1,波形被扩展为原来的a倍
- 展缩、翻转、平移: 可将按照任意顺序进行上述计算,例如:
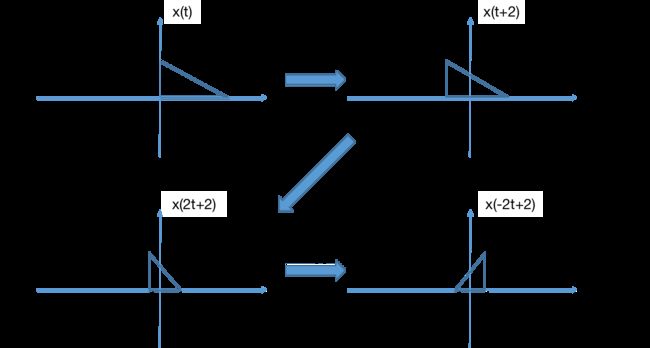
二、离散时间信号的展缩、翻转、平移
离散时间信号的展缩、翻转、平移: x[n]→x[an+b],a、b为实常数,a≠0
离散时间信号波形的翻转和平移的方法与连续信号相同,而展缩变换有所不同,由于离散时间信号时间不连续的特性,导致该类信号在进行压缩时会导致部分信号的丢失;在进行扩展的时候会导致信号在部分时间上没有定义。

2.2.2 信号的分解
信号可以分解成以下几种形式:
- 信号分解为奇偶信号之和
- 信号分解为基本信号的有限项之和
- 信号的因子分解
- 信号分解为矩阵脉冲之和
- 信号分解为正交信号分量之和
这里着重介绍信号分解为矩形脉冲之和的方法
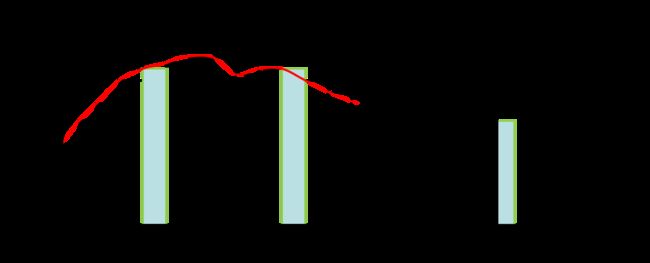
由上图,将连续时间信号x(t)分解为多个矩形脉冲之和,这些矩形脉冲的宽度均为τ,则
x ( t ) ≈ x ( 0 ) ⋅ g ( t ) + x ( Δ τ ) ⋅ g ( t − Δ τ ) + . . . + x ( n Δ τ ) ⋅ g ( t − n Δ τ ) x(t)≈x(0)·g(t)+x(Δτ)·g(t-Δτ)+...+x(nΔτ)·g(t-nΔτ) x(t)≈x(0)⋅g(t)+x(Δτ)⋅g(t−Δτ)+...+x(nΔτ)⋅g(t−nΔτ)
= ∑ k = − ∞ ∞ x ( n Δ τ ) ⋅ g ( t − n Δ τ ) = ∑ k = − ∞ ∞ x ( n Δ τ ) ⋅ g ( t − n Δ τ ) Δ τ ⋅ Δ τ =\sum ^{\infty }_{k=-\infty }x(nΔτ)·g(t-nΔτ)=\sum ^{\infty }_{k=-\infty }x(nΔτ)·\dfrac {g(t-nΔτ)}{Δτ}·Δτ =∑k=−∞∞x(nΔτ)⋅g(t−nΔτ)=∑k=−∞∞x(nΔτ)⋅Δτg(t−nΔτ)⋅Δτ
当Δτ → 0时,n Δ τ → τ , g ( t − n Δ τ ) Δ τ \dfrac {g(t-nΔτ)}{Δτ} Δτg(t−nΔτ) → δ (t-τ ),Δ τ → d τ
x ( t ) = ∫ − ∞ ∞ x ( τ ) ⋅ δ ( t − τ ) d τ x(t)=\int _{-\infty }^{\infty }x(\tau)·\delta \left( t-\tau\right) d\tau x(t)=∫−∞∞x(τ)⋅δ(t−τ)dτ
类似地,任意离散时间信号可分解为:
x [ n ] = ∑ k = − ∞ ∞ x [ k ] ⋅ δ [ n − k ] x[n]=\sum ^{\infty }_{k=-\infty }x[k]·\delta[n-k] x[n]=k=−∞∑∞x[k]⋅δ[n−k]
2.3 卷积积分、卷积和
2.3.1 卷积的定义
卷积积分: x 1 ( t ) ∗ x 2 ( t ) = ∫ − ∞ ∞ x 1 ( τ ) x 2 ( t − τ ) d τ x_{1}(t)*x_{2}(t)=\int _{-\infty }^{\infty}x_{1} \left( \tau \right)x_{2}(t-\tau) d\tau x1(t)∗x2(t)=∫−∞∞x1(τ)x2(t−τ)dτ
卷积和: x 1 [ n ] ∗ x 2 [ n ] = ∑ k = − ∞ ∞ x 1 [ k ] ⋅ x 2 [ n − k ] x_{1}[n]*x_{2}[n]=\sum ^{\infty }_{k=-\infty }x_{1}[k]·x_{2}[n-k] x1[n]∗x2[n]=∑k=−∞∞x1[k]⋅x2[n−k]
卷积的物理意义:揭示了LTI系统的零状态响应与输入信号、系统单位冲激响应之间的关系。
2.3.2 卷积的图解法
卷积积分运算: x 1 ( t ) ∗ x 2 ( t ) = ∫ − ∞ ∞ x 1 ( τ ) x 2 ( t − τ ) d τ x_{1}(t)*x_{2}(t)=\int _{-\infty }^{\infty}x_{1} \left( \tau \right)x_{2}(t-\tau) d\tau\quad x1(t)∗x2(t)=∫−∞∞x1(τ)x2(t−τ)dτ实际上包含了四个步骤:
- 换元 t→τ
- 翻转 x2(τ)→x2(-τ)
- 移位 x2(-τ)→x2(t-τ)
- 相乘积分
p 1 ( t ) p_{1}(t) p1(t)与 p 2 ( t ) p_{2}(t) p2(t)的卷积运算 p 1 ( t ) ∗ p 2 ( t ) p_{1}(t)*p_{2}(t) p1(t)∗p2(t) 具体图解如下:
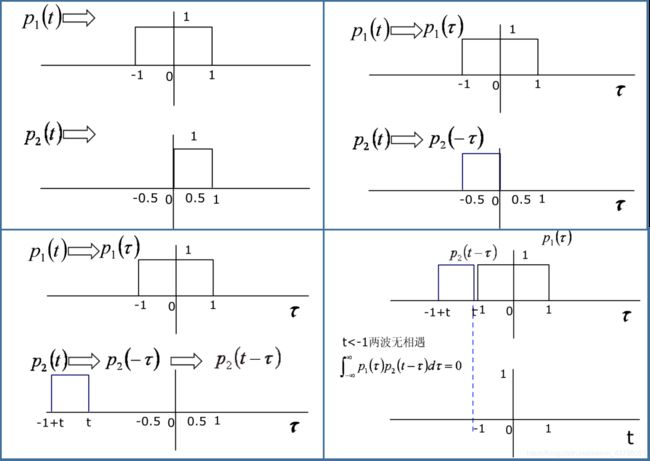
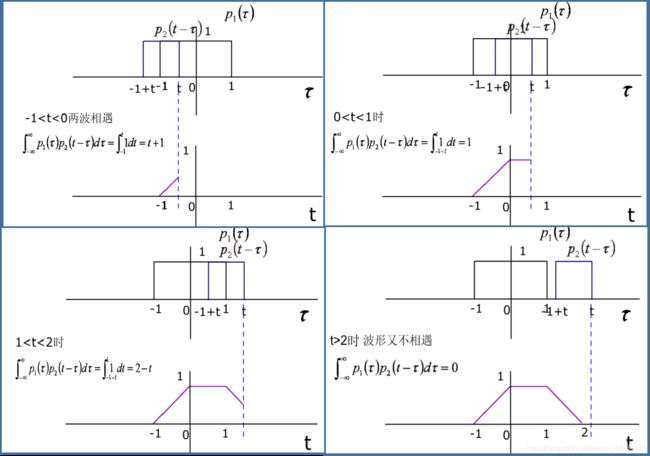
可以看出,两个有限长信号卷积,卷积后信号的长度为原两信号长度之和,起始时刻为原信号起始时刻之和。
卷积和运算: x 1 [ n ] ∗ x 2 [ n ] = ∑ k = − ∞ ∞ x 1 [ k ] ⋅ x 2 [ n − k ] x_{1}[n]*x_{2}[n]=\sum ^{\infty }_{k=-\infty }x_{1}[k]·x_{2}[n-k] x1[n]∗x2[n]=∑k=−∞∞x1[k]⋅x2[n−k]同样包含了四个步骤:
- 换元 n→k
- 翻转 x2[k]→x2[-k]
- 移位 x2[-k]→x2[n-k]
- 相乘求和
x 1 [ n ] x_{1}[n] x1[n]与 x 2 [ n ] x_{2}[n] x2[n]的卷积运算 x 1 [ n ] ∗ x 2 [ n ] x_{1}[n]*x_{2}[n] x1[n]∗x2[n] 具体图解如下:
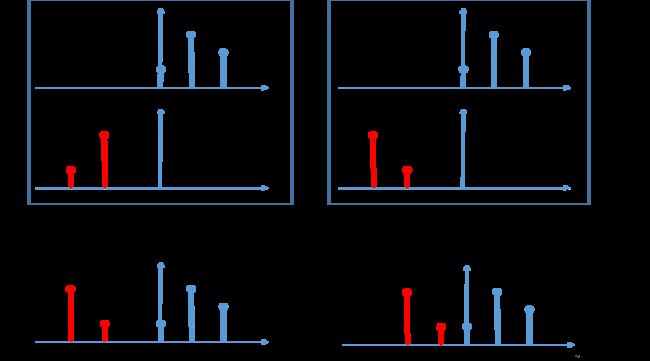
可以看出,两个有限长序列卷积,卷积后序列的长度为原两序列长度和-1,起始时刻为原序列起始时间之和。
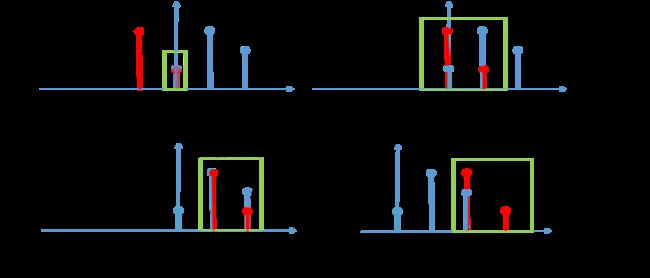
对于卷积和,还可以使用下图所示的竖式法
遵循的规则:
- 右端对齐
- 各点分别相乘相加,不进位
- 起始序号为两序列起始序号之和
2.3.3 卷积的性质
1. 卷积代数
- 交换律: x 1 ( t ) ∗ x 2 ( t ) = x 2 ( t ) ∗ x 1 ( t ) x_{1}(t) * x_{2}(t) = x_{2}(t) * x_{1}(t) x1(t)∗x2(t)=x2(t)∗x1(t)
- 分配律: x 1 ( t ) ∗ [ x 2 ( t ) + x 3 ( t ) ] = x 1 ( t ) ∗ x 2 ( t ) + x 1 ( t ) ∗ x 3 ( t ) x_{1}(t)*[x_{2}(t)+ x_{3}(t)]= x_{1}(t)*x_{2}(t)+ x_{1}(t)*x_{3}(t) x1(t)∗[x2(t)+x3(t)]=x1(t)∗x2(t)+x1(t)∗x3(t)
- 结合律: [ x 1 ( t ) ∗ x 2 ( t ) ] ∗ x 3 ( t ) = x 1 ( t ) ∗ [ x 2 ( t ) ∗ x 3 ( t ) ] [x_{1}(t)*x_{2}(t)]*x_{3}(t) = x_{1}(t)*[x_{2}(t)*x_{3}(t)] [x1(t)∗x2(t)]∗x3(t)=x1(t)∗[x2(t)∗x3(t)]
2. 冲激信号的卷积特性
-
δ ( t ) ∗ x ( t ) = x ( t ) \delta(t)*x(t)=x(t) δ(t)∗x(t)=x(t),称δ(t)是卷积积分的单位元。
证明: δ ( t ) ∗ x ( t ) = ∫ − ∞ ∞ δ ( τ ) x ( t − τ ) d τ = x ( t ) \delta(t)*x(t)=\int_{-\infty}^{\infty}\delta(\tau)x(t-\tau)d\tau=x(t) δ(t)∗x(t)=∫−∞∞δ(τ)x(t−τ)dτ=x(t) -
δ ( t − t 0 ) ∗ x ( t ) = x ( t − t 0 ) \delta(t-t_{0})*x(t)=x(t-t_{0}) δ(t−t0)∗x(t)=x(t−t0),称 δ ( t − t 0 ) \delta(t-t_{0}) δ(t−t0)为延时器。
推论:如果 x 1 ( t ) ∗ x 2 ( t ) = y ( t ) x_{1}(t)*x_{2}(t)=y(t) x1(t)∗x2(t)=y(t),那么 x 1 ( t ) ∗ x 2 ( t − t 0 ) = y ( t − t 0 ) x_{1}(t)*x_{2}(t-t_{0})=y(t-t_{0}) x1(t)∗x2(t−t0)=y(t−t0)
x 1 ( t − t 1 ) ∗ x 2 ( t − t 2 ) = y ( t − t 1 − t 2 ) \qquad \qquad \qquad x_{1}(t-t_{1})*x_{2}(t-t_{2})=y(t-t_{1}-t_{2}) x1(t−t1)∗x2(t−t2)=y(t−t1−t2)
该性质称为卷积的时不变性,该性质对于离散样值信号同样有效:
δ [ n ] ∗ x [ n ] = x [ n ] δ [ n − n 0 ] ∗ x [ n ] = x [ n − n 0 ] \delta[n]*x[n]=x[n] \quad \delta[n-n_{0}]*x[n]=x[n-n_{0}] δ[n]∗x[n]=x[n]δ[n−n0]∗x[n]=x[n−n0]
3.卷积的微分特性
δ ′ ( t ) ∗ x ( t ) = x ′ ( t ) \delta'(t)*x(t)=x'(t) δ′(t)∗x(t)=x′(t),称δ’(t)是微分器。
推论: δ ( n ) ( t ) ∗ x ( t ) = x ( n ) ( t ) \delta^{(n)}(t)*x(t)=x^{(n)}(t) δ(n)(t)∗x(t)=x(n)(t)
d x 1 ( t ) d t ∗ x 2 ( t ) = x 1 ( t ) ∗ d x 2 ( t ) d t = d d t [ x 1 ( t ) ∗ x 2 ( t ) ] \qquad\dfrac{dx_{1}(t)}{dt}*x_{2}(t)=x_{1}(t)*\dfrac{dx_{2}(t)}{dt}=\dfrac{d}{dt}[x_{1}(t)*x_{2}(t)] dtdx1(t)∗x2(t)=x1(t)∗dtdx2(t)=dtd[x1(t)∗x2(t)]
4.卷积的积分特性
x ( t ) ∗ u ( t ) = ∫ − ∞ t x ( τ ) d τ x(t)*u(t)=\int_{-\infty}^{t}x(\tau)d\tau x(t)∗u(t)=∫−∞tx(τ)dτ,称u(t)是模拟积分器。
证明: x ( t ) ∗ u ( t ) = ∫ − ∞ ∞ x ( τ ) u ( t − τ ) d τ = ∫ − ∞ t x ( τ ) d τ x(t)*u(t)=\int_{-\infty}^{\infty}x(\tau)u(t-\tau)d\tau=\int_{-\infty}^{t}x(\tau)d\tau x(t)∗u(t)=∫−∞∞x(τ)u(t−τ)dτ=∫−∞tx(τ)dτ
推论: [ ∫ − ∞ t x 1 ( τ ) d τ ] ∗ x 2 ( t ) \left[ \int _{-\infty }^{t}x_{1}\left( \tau \right) d\tau \right] \ast x_{2}\left( t\right) [∫−∞tx1(τ)dτ]∗x2(t)
= x 1 ( t ) ∗ [ ∫ − ∞ t x 2 ( τ ) d τ ] \qquad\qquad=x_{1}\left( t\right) \ast \left[ \int _{-\infty }^{t}x_{2}\left( \tau \right) d\tau \right] =x1(t)∗[∫−∞tx2(τ)dτ]
= ∫ − ∞ t [ x 1 ( τ ) ∗ x 2 ( τ ) d τ ] \qquad\qquad=\int _{-\infty }^{t}\left[ x_{1}\left( \tau\right) \ast x_{2}\left( \tau\right) d\tau\right] =∫−∞t[x1(τ)∗x2(τ)dτ]
x 1 ( t ) ∗ x 2 ( t ) = ∫ − ∞ t x 1 ( τ ) d τ ∗ d x 2 ( t ) d t = d x 1 ( t ) d t ∗ ∫ − ∞ t x 2 ( τ ) d τ \qquad x_{1}(t)*x_{2}(t)=\int_{-\infty}^{t}x_{1}(\tau)d\tau*\dfrac{dx_{2}(t)}{dt}=\dfrac{dx_{1}(t)}{dt}*\int_{-\infty}^{t}x_{2}(\tau)d\tau x1(t)∗x2(t)=∫−∞tx1(τ)dτ∗dtdx2(t)=dtdx1(t)∗∫−∞tx2(τ)dτ
上式成立条件: lim t → − ∞ x 1 ( t ) = lim t → − ∞ x 2 ( t ) = 0 \lim _{t\rightarrow -\infty }x_{1}\left( t\right) =\lim _{t\rightarrow -\infty }x_{2}\left( t\right) =0 t→−∞limx1(t)=t→−∞limx2(t)=0
5.卷积的求和特性
x [ n ] ∗ u [ n ] = ∑ k = − ∞ n x [ k ] x[n]*u[n]=\sum_{k=-\infty}^{n}x[k] x[n]∗u[n]=∑k=−∞nx[k],称u[n]是数字积分器。
推论: [ ∑ k = − ∞ n x 1 [ k ] ] ∗ x 2 [ n ] = x 1 [ n ] ∗ [ ∑ k = − ∞ n x 2 [ k ] ] = ∑ k = − ∞ n [ x 1 [ k ] ∗ x 2 [ k ] ] \left[ \sum ^{n}_{k=-\infty }x_{1}\left[ k\right] \right] \ast x_{2}\left[ n\right]=x_{1}\left[ n\right] \ast \left[ \sum ^{n}_{k=-\infty }x_{2}\left[ k\right] \right]=\sum ^{n}_{k=-\infty }\left[ x_{1}\left[ k\right] \ast x_{2}\left[ k\right] \right] [∑k=−∞nx1[k]]∗x2[n]=x1[n]∗[∑k=−∞nx2[k]]=∑k=−∞n[x1[k]∗x2[k]]
2.4 连续时间系统的时域分析
2.4.1 连续时间系统的数学模型——微分方程
1. 微分方程的基本形式:
d n d t n y ( t ) + a n − 1 d n − 1 d t n − 1 y ( t ) + … + a 1 d d t y ( t ) + a 0 y ( t ) = b m d m d t m x ( t ) + … + b 1 d d t x ( t ) + b 0 x ( t ) \dfrac{d^{n}}{dt^{n}}y\left( t\right) +a_{n-1}\dfrac{d^{n-1}}{dt^{n-1}}y\left( t\right) +\ldots +a_{1}\dfrac{d}{dt}y\left( t\right) +a_{0}y\left( t\right)=b_{m}\dfrac{d^{m}}{dt^{m}}x\left( t\right) +\ldots +b_{1}\dfrac{d}{dt}x\left( t\right) +b_{0}x\left( t\right) dtndny(t)+an−1dtn−1dn−1y(t)+…+a1dtdy(t)+a0y(t)=bmdtmdmx(t)+…+b1dtdx(t)+b0x(t)
2. 微分方程的求解方法
-
时域解法
微分方程的解分为齐次解yn(t)和特解yf(t)。y(t)=yn(t)+yf(t) -
零输入/零状态解法
全响应=零输入响应yzi(t)+零状态响应yzs(t)。y(t)=yzi(t)+yzs(t) -
变换域解法
通过拉普拉斯变换求解微分方程。此处重点讨论零输入/零响应解法
全响应=零输入响应yzi(t)+零状态响应yzs(t)。y(t)=yzi(t)+yzs(t)
零输入响应:输入x(t)为零,仅由初始状态产生的响应,记为yzi(t)
零状态响应:初始状态为零,仅由输入信号x(t)产生的响应,记为yzs(t)通常取t=0时刻作为起始时刻
输入信号在t=0时刻之后作用于系统,记为x(t)=f(t)·u(t)
t = 0 − t=0^{-} t=0−时刻系统的状态称为 t = 0 − t=0^{-} t=0−状态,记为 y ( 0 − ) y(0^{-}) y(0−)、 y ′ ( 0 − ) y'(0^{-}) y′(0−)…
t = 0 + t=0^{+} t=0+时刻系统的状态称为 t = 0 + t=0^{+} t=0+状态,记为 y ( 0 + ) y(0^{+}) y(0+)、 y ′ ( 0 + ) y'(0^{+}) y′(0+)…零输入响应由于其输入为0,根据微分方程齐次方程求解:
d n d t n y ( t ) + a n − 1 d n − 1 d t n − 1 y ( t ) + … + a 1 d d t y ( t ) + a 0 y ( t ) = 0 \dfrac{d^{n}}{dt^{n}}y\left( t\right) +a_{n-1}\dfrac{d^{n-1}}{dt^{n-1}}y\left( t\right) +\ldots +a_{1}\dfrac{d}{dt}y\left( t\right) +a_{0}y\left( t\right)=0 dtndny(t)+an−1dtn−1dn−1y(t)+…+a1dtdy(t)+a0y(t)=0
其特征方程为: D ( λ ) = λ n + a n − 1 λ n − 1 + . . . + a 1 λ + a 0 = 0 D(\lambda)=\lambda^{n}+a_{n-1}\lambda^{n-1}+...+a_{1}\lambda+a_{0}=0 D(λ)=λn+an−1λn−1+...+a1λ+a0=0
通过因式分解,解得特征根 λ 1 , λ 2 , . . . , λ n λ_{1} , λ_{2} , ... , λ_{n} λ1,λ2,...,λn特征根为单实根时,可得微分方程的齐次通解: y z i ( t ) = c 1 e λ 1 t + c 2 e λ 2 t + . . . + c n e λ n t y_{zi}(t)=c_{1}e^{\lambda_{1}t}+c_{2}e^{\lambda_{2}t}+...+c_{n}e^{\lambda_{n}t} yzi(t)=c1eλ1t+c2eλ2t+...+cneλnt
其中, e λ t e^{\lambda t} eλt称为特征模式,这也是连续时间指数信号一般表示成 e s t e^{st} est的形式的原因。
零输入响应时齐次方程的解,其形式与时域解法中的齐次通解相同。
待定系数由初始状态 y z i ( 0 − ) = y ( 0 − ) 、 y z i ′ ( 0 − ) = y ′ ( 0 − ) y_{zi}(0^{-})=y(0^{-})、y_{zi}'(0^{-})=y'(0^{-}) yzi(0−)=y(0−)、yzi′(0−)=y′(0−)确定。例 1 : R L C 电 路 如 图 所 示 , i ( t ) 为 输 出 , R = 3 Ω , L = 1 H , C = 1 2 F , 例1:RLC电路如图所示,i(t)为输出,R=3\Omega,L=1H,C=\dfrac{1}{2}F, 例1:RLC电路如图所示,i(t)为输出,R=3Ω,L=1H,C=21F,
输 入 x ( t ) = 10 e − 3 t u ( t ) , i ( 0 − ) = 0 , u c ( 0 − ) = 5 V , 试 求 其 零 输 入 响 应 i z i ( t ) 输入x(t)=10e^{-3t}u(t),i(0^{-})=0,u_{c}(0^{-})=5V,试求其零输入响应i_{zi}(t) 输入x(t)=10e−3tu(t),i(0−)=0,uc(0−)=5V,试求其零输入响应izi(t)
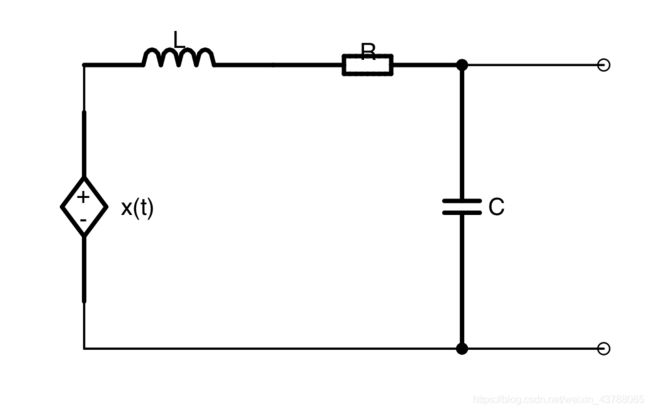
根据电感、电阻、电容与电流的关系,建立将该电路的模型为:
L i ′ ′ ( t ) + R i ′ ( t ) + 1 C i ( t ) = x ′ ( t ) Li''(t)+Ri'(t)+\dfrac{1}{C}i(t)=x'(t) Li′′(t)+Ri′(t)+C1i(t)=x′(t)
代入参数得:
i ′ ′ ( t ) + 3 i ′ ( t ) + 2 i ( t ) = x ′ ( t ) i''(t)+3i'(t)+2i(t)=x'(t) i′′(t)+3i′(t)+2i(t)=x′(t)
由此可得微分方程的特征方程为:
λ 2 + 3 λ + 2 = 0 \lambda^2+3\lambda+2=0 λ2+3λ+2=0
因式分解得:
( λ + 1 ) ( λ + 2 ) = 0 (\lambda+1)(\lambda+2)=0 (λ+1)(λ+2)=0
由此可得特征根为:
λ 1 = − 1 , λ 2 = − 2 \lambda_{1}=-1,\lambda_{2}=-2 λ1=−1,λ2=−2
将特征根代入可得通解为:
i z i ( t ) = C 1 e − t + C 2 e − 2 t , t > 0 i_{zi}(t)=C_{1}e^{-t}+C_{2}e^{-2t},t>0 izi(t)=C1e−t+C2e−2t,t>0
该式中仍有 C 1 、 C 2 C_{1}、C_{2} C1、C2两个未知量,通过待定系数法解出:
由基尔霍夫电压定律(KVL)得:
L i ′ ( 0 − ) + R i ( 0 − ) + u c ( 0 − ) = 0 Li'(0^-)+Ri(0^-)+u_c(0^-)=0 Li′(0−)+Ri(0−)+uc(0−)=0
解得:
i ′ ( 0 − ) = − 5 i'(0^-)=-5 i′(0−)=−5
对 i z i ( t ) = C 1 e − t + C 2 e − 2 i_{zi}(t)=C_{1}e^{-t}+C_{2}e^{-2} izi(t)=C1e−t+C2e−2求导,得:
i ′ ( t ) = − C 1 e − t − 2 C 2 e − 2 t i'(t)=-C_1e^{-t}-2C_2e^{-2t} i′(t)=−C1e−t−2C2e−2t
将 i ( 0 − ) = 0 , u c ( 0 − ) = 5 V i(0^{-})=0,u_{c}(0^{-})=5V i(0−)=0,uc(0−)=5V代入通解,得:
{ i ( 0 ) = C 1 + C 2 = 0 i ′ ( 0 ) = − C 1 − 2 C 2 = − 5 \begin{cases}i\left( 0\right) =C_{1}+C_{2}=0\\ i'\left( 0\right) =-C_{1}-2C_{2}=-5\end{cases} {i(0)=C1+C2=0i′(0)=−C1−2C2=−5
解得:
{ C 1 = − 5 C 2 = 5 \begin{cases}C_{1}=-5\\ C_{2}=5\end{cases} {C1=−5C2=5
从而该RLC电路系统的零输入响应为:
i z i ( t ) = − 5 e − t + 5 e − 2 t , t > 0 i_{zi}(t)=-5e^{-t}+5e^{-2t},t>0 izi(t)=−5e−t+5e−2t,t>0
3. 单位冲激响应
系统初始状态为零,输入为单位冲激信号 δ ( t ) \delta(t) δ(t)时的响应,称为单位冲激响应,记为h(t),将h(t)代入微分方程
d n d t n y ( t ) + a n − 1 d n − 1 d t n − 1 y ( t ) + … + a 1 d d t y ( t ) + a 0 y ( t ) = b m d m d t m x ( t ) + … + b 1 d d t x ( t ) + b 0 x ( t ) \dfrac{d^{n}}{dt^{n}}y\left( t\right) +a_{n-1}\dfrac{d^{n-1}}{dt^{n-1}}y\left( t\right) +\ldots +a_{1}\dfrac{d}{dt}y\left( t\right) +a_{0}y\left( t\right)=b_{m}\dfrac{d^{m}}{dt^{m}}x\left( t\right) +\ldots +b_{1}\dfrac{d}{dt}x\left( t\right) +b_{0}x\left( t\right) dtndny(t)+an−1dtn−1dn−1y(t)+…+a1dtdy(t)+a0y(t)=bmdtmdmx(t)+…+b1dtdx(t)+b0x(t)
可得适用于单位冲激响应的微分方程:
h ( n ) ( t ) + a n − 1 h ( n − 1 ) ( t ) + . . . + a 0 h ( t ) = b m δ ( m ) ( t ) + . . . + b 1 δ ′ ( t ) + b 0 δ ( t ) h^{(n)}(t)+a_{n-1}h^{(n-1)}(t)+...+a_{0}h(t)=b_{m}\delta^{(m)}(t)+...+b_{1}\delta'(t)+b_{0}\delta(t) h(n)(t)+an−1h(n−1)(t)+...+a0h(t)=bmδ(m)(t)+...+b1δ′(t)+b0δ(t)
由于该方程右侧由高阶冲激信号构成,只在t=0处不为零,在其他位置均为零,因此可以通过求齐次通解的方法来求解h(t)中t≠0的部分,其通解表示为特征模式项之和:
y ( t ) = c 1 e λ 1 t + c 2 e λ 2 t + . . . + c n e λ n t y(t)=c_{1}e^{\lambda_{1}t}+c_{2}e^{\lambda_{2}t}+...+c_{n}e^{\lambda_{n}t} y(t)=c1eλ1t+c2eλ2t+...+cneλnt
将通解与单位阶跃信号相乘,表示t>0时的情况
当t=0时,需要考虑高阶冲激信号产生的响应,该响应取决于单位冲激响应微分方程中的最高阶数m和n的大小:
- 当n>m时, h ( t ) = h(t)= h(t)=[特征模式项之和] u ( t ) u(t) u(t)
- 当n=m时, h ( t ) = b m + h(t)=b_{m}+ h(t)=bm+[特征模式项之和] u ( t ) u(t) u(t)
- 当n
例 2 : 已 知 某 L T I 系 统 y ′ ′ ( t ) + 3 y ′ ( t ) + 2 y ( t ) = x ′ ( t ) , 试 求 其 单 位 冲 激 响 应 h ( t ) 例2:已知某LTI系统y''(t)+3y'(t)+2y(t)=x'(t),试求其单位冲激响应h(t) 例2:已知某LTI系统y′′(t)+3y′(t)+2y(t)=x′(t),试求其单位冲激响应h(t)
根据
y ′ ′ ( t ) + 3 y ′ ( t ) + 2 y ( t ) = x ′ ( t ) y''(t)+3y'(t)+2y(t)=x'(t) y′′(t)+3y′(t)+2y(t)=x′(t)
代入 δ ( t ) \delta(t) δ(t)可得:
h ′ ′ ( t ) + 3 h ′ ( t ) + 2 h ( t ) = δ ′ ( t ) h''(t)+3h'(t)+2h(t)=\delta'(t) h′′(t)+3h′(t)+2h(t)=δ′(t)
可得特征方程:
λ 2 + 3 λ + 2 = 0 \lambda^2+3\lambda+2=0 λ2+3λ+2=0
解得特征根:
λ 1 = − 1 , λ 2 = − 2 \lambda_{1}=-1,\lambda_{2}=-2 λ1=−1,λ2=−2
由此可得单位冲激响应:
h ( t ) = ( C 1 e − t + C 2 e − 2 t ) u ( t ) h(t)=(C_1e^{-t}+C_2e^{-2t})u(t) h(t)=(C1e−t+C2e−2t)u(t)
h ′ ( t ) = ( C 1 e − t + C 2 e − 2 t ) δ ( t ) + ( − C 1 e − t − 2 C 2 e − 2 t ) u ( t ) = ( C 1 + C 2 ) δ ( t ) + ( − C 1 e − t − 2 C 2 e − 2 t ) u ( t ) \begin{aligned} h'(t) &=(C_1e^{-t}+C_2e^{-2t})\delta(t)+(-C_1e^{-t}-2C_2e^{-2t})u(t)\\&=(C_1+C_2)\delta(t)+(-C_1e^{-t}-2C_2e^{-2t})u(t)\end{aligned} h′(t)=(C1e−t+C2e−2t)δ(t)+(−C1e−t−2C2e−2t)u(t)=(C1+C2)δ(t)+(−C1e−t−2C2e−2t)u(t)
h ′ ′ ( t ) = ( C 1 + C 2 ) δ ′ ( t ) + ( − C 1 − 2 C 2 ) δ ( t ) + ( C 1 e − t + 4 C 2 e − 2 t ) u ( t ) h''(t)=(C_1+C_2)\delta'(t)+(-C_1-2C_2)\delta(t)+(C_1e^{-t}+4C_2e^{-2t})u(t) h′′(t)=(C1+C2)δ′(t)+(−C1−2C2)δ(t)+(C1e−t+4C2e−2t)u(t)
通过冲激平衡法,将 h ′ ′ ( t ) 、 h ′ ( t ) 、 h ( t ) h''(t)、h'(t)、h(t) h′′(t)、h′(t)、h(t)代入 h ′ ′ ( t ) + 3 h ′ ( t ) + 2 h ( t ) = δ ′ ( t ) h''(t)+3h'(t)+2h(t)=\delta'(t) h′′(t)+3h′(t)+2h(t)=δ′(t),解得:
C 1 = − 1 , C 2 = 2 C_1=-1,C_2=2 C1=−1,C2=2
由此可得单位冲激响应:
h ( t ) = ( − e − t + 2 e − 2 t ) u ( t ) h(t)=(-e^{-t}+2e^{-2t})u(t) h(t)=(−e−t+2e−2t)u(t)
4. 零状态响应
因为系统单位冲激响应为
δ ( t ) → h ( t ) \delta(t)\rightarrow h(t) δ(t)→h(t)
根据时不变性:
δ ( t − n Δ τ ) → h ( t − n Δ τ ) \delta(t-n\Delta\tau) \rightarrow h(t-n\Delta\tau) δ(t−nΔτ)→h(t−nΔτ)
根据齐次性:
x ( n Δ τ ) δ ( t − n Δ τ ) Δ τ → x ( n Δ τ ) h ( t − n Δ τ ) Δ τ x(n\Delta\tau)\delta(t-n\Delta\tau)\Delta\tau\rightarrow x(n\Delta\tau)h(t-n\Delta\tau)\Delta\tau x(nΔτ)δ(t−nΔτ)Δτ→x(nΔτ)h(t−nΔτ)Δτ
根据可加性:
∑ n = − ∞ ∞ x ( n Δ τ ) δ ( t − n Δ τ ) Δ τ → ∑ n = − ∞ ∞ x ( n Δ τ ) h ( t − n Δ τ ) Δ τ \sum_{n=-\infty}^{\infty}x(n\Delta\tau)\delta(t-n\Delta\tau)\Delta\tau\rightarrow\sum_{n=-\infty}^{\infty}x(n\Delta\tau)h(t-n\Delta\tau)\Delta\tau n=−∞∑∞x(nΔτ)δ(t−nΔτ)Δτ→n=−∞∑∞x(nΔτ)h(t−nΔτ)Δτ
当 Δ τ → 0 \Delta\tau\rightarrow0 Δτ→0时,可以得出:
x ( t ) = ∫ − ∞ ∞ x ( τ ) δ ( t − τ ) d τ → y z s ( t ) = ∫ − ∞ ∞ x ( τ ) h ( t − τ ) d τ x(t)=\int_{-\infty}^{\infty}x(\tau)\delta(t-\tau)d\tau \rightarrow y_{zs}(t)=\int_{-\infty}^{\infty}x(\tau)h(t-\tau)d\tau x(t)=∫−∞∞x(τ)δ(t−τ)dτ→yzs(t)=∫−∞∞x(τ)h(t−τ)dτ
首先分析 x ( t ) x(t) x(t)和 δ ( t ) \delta(t) δ(t)的关系:
x ( t ) = ∫ − ∞ ∞ x ( τ ) δ ( t − τ ) d τ = x ( t ) ∗ δ ( t ) \begin{aligned} x(t) &=\int_{-\infty}^{\infty}x(\tau)\delta(t-\tau)d\tau\\&=x(t) * \delta(t)\end{aligned} x(t)=∫−∞∞x(τ)δ(t−τ)dτ=x(t)∗δ(t)
称为“信号的分解特性”。以 δ ( t ) \delta(t) δ(t)为基本信号,将任意的信号 x ( t ) x(t) x(t)分解为 δ ( t ) \delta(t) δ(t)的线性加权组合。
而 y z s ( t ) y_{zs}(t) yzs(t)和 h ( t ) h(t) h(t)的关系:
y z s ( t ) = ∫ − ∞ ∞ x ( τ ) h ( t − τ ) d τ y_{zs}(t)=\int_{-\infty}^{\infty}x(\tau)h(t-\tau)d\tau yzs(t)=∫−∞∞x(τ)h(t−τ)dτ
称为“响应的分解特性”,以 h ( t ) h(t) h(t)为基本响应,将 x ( t ) x(t) x(t)产生的 y z s ( t ) y_{zs}(t) yzs(t)分解为 h ( t ) h(t) h(t)的线性加权组合,因此:
零 状 态 响 应 = 输 入 信 号 ∗ 单 位 冲 激 响 应 零状态响应=输入信号*单位冲激响应 零状态响应=输入信号∗单位冲激响应
5.响应模式分析
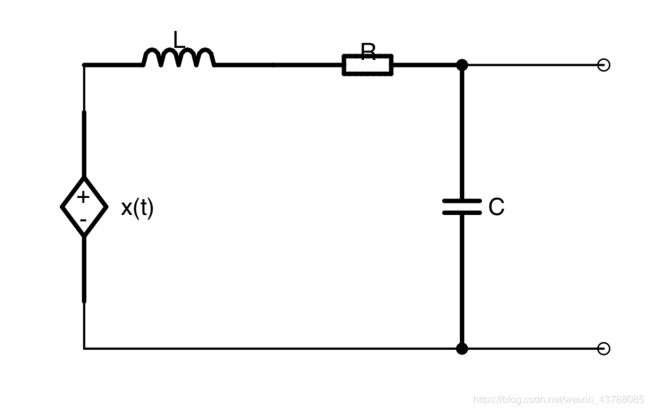
例 2 : R L C 电 路 如 图 所 示 , i ( t ) 为 输 出 , R = 3 Ω , L = 1 H , C = 1 2 F , 例2:RLC电路如图所示,i(t)为输出,R=3\Omega,L=1H,C=\dfrac{1}{2}F, 例2:RLC电路如图所示,i(t)为输出,R=3Ω,L=1H,C=21F,
输 入 x ( t ) = 10 e − 3 t u ( t ) , i ( 0 − ) = 0 , u c ( 0 − ) = 5 V , 试 求 其 全 输 入 响 应 i ( t ) 输入x(t)=10e^{-3t}u(t),i(0^{-})=0,u_{c}(0^{-})=5V,试求其全输入响应i(t) 输入x(t)=10e−3tu(t),i(0−)=0,uc(0−)=5V,试求其全输入响应i(t)
由例1:
i ′ ′ ( t ) + 3 i ′ ( t ) + 2 i ( t ) = x ′ ( t ) i''(t)+3i'(t)+2i(t)=x'(t) i′′(t)+3i′(t)+2i(t)=x′(t)
λ 2 + 3 λ + 2 = 0 \lambda^2+3\lambda+2=0 λ2+3λ+2=0
λ 1 = − 1 , λ 2 = − 2 \lambda_1=-1,\lambda_2=-2 λ1=−1,λ2=−2
零输入响应:
i z i ( t ) = − 5 e − t + 5 e − 2 t i_{zi}(t)=-5e^{-t}+5e^{-2t} izi(t)=−5e−t+5e−2t
单位冲激响应:
h ( t ) = ( − e − t + 2 e − 2 t ) u ( t ) h(t)=(-e^{-t}+2e^{-2t})u(t) h(t)=(−e−t+2e−2t)u(t)
零状态响应:
i z s ( t ) = x ( t ) ∗ h ( t ) = ( − 5 e − t + 20 e − 2 t − 15 e − 3 t ) u ( t ) \begin{aligned} i_{zs}(t)&=x(t)*h(t)\\ &=(-5e^{-t}+20e^{-2t}-15e^{-3t})u(t) \end{aligned} izs(t)=x(t)∗h(t)=(−5e−t+20e−2t−15e−3t)u(t)
将零状态响应与零输入响应相加,得全响应:
i ( t ) = i z i ( t ) + i z s ( t ) = ( − 5 e − t + 5 e − 2 t ) u ( t ) + ( − 5 e − t + 20 e − 2 t − 15 e − 3 t ) u ( t ) \begin{aligned} i(t)&=i_{zi}(t)+i_{zs}(t)\\&=(-5e^{-t}+5e^{-2t})u(t)+(-5e^{-t}+20e^{-2t}-15e^{-3t})u(t) \end{aligned} i(t)=izi(t)+izs(t)=(−5e−t+5e−2t)u(t)+(−5e−t+20e−2t−15e−3t)u(t)
整理可得:
i ( t ) = ( − 10 e − t + 25 e − 2 t − 15 e − 3 t ) u ( t ) i(t)=(-10e^{-t}+25e^{-2t}-15e^{-3t})u(t) i(t)=(−10e−t+25e−2t−15e−3t)u(t)
其中, − 10 e − t + 25 e − 2 t -10e^{-t}+25e^{-2t} −10e−t+25e−2t被称为自然响应,也称为自由响应或固有响应,自然响应是由系统特征模式决定的那部分响应,记作 y n ( t ) y_n(t) yn(t);
而 − 15 e − 3 t -15e^{-3t} −15e−3t则被称为强迫响应,强迫响应是由激励信号决定的响应,记作 y f ( t ) y_f(t) yf(t)。
整理上述全响应、零输入响应、零状态响应、自然响应和强迫响应的关系可得:
全 响 应 = 零 输 入 响 应 + 零 状 态 响 应 全 响 应 = 自 然 响 应 + 强 迫 响 应 自 然 响 应 = 零 输 入 响 应 + 零 状 态 响 应 中 由 系 统 特 征 根 决 定 的 部 分 强 迫 响 应 = 零 状 态 响 应 中 由 输 入 信 号 特 征 模 式 决 定 的 部 分 零 输 入 响 应 ≠ 自 然 响 应 = 一 部 分 自 然 响 应 = 微 分 方 程 的 齐 次 解 零 状 态 响 应 ≠ 强 迫 响 应 = 另 一 部 分 自 然 响 应 + 强 迫 响 应 = 微 分 方 程 的 特 解 \begin{aligned} 全响应&=零输入响应+零状态响应\\ 全响应&=自然响应+强迫响应\\\\ 自然响应&=零输入响应+零状态响应中由系统特征根决定的部分\\ 强迫响应&=零状态响应中由输入信号特征模式决定的部分\\\\ 零输入响应&≠自然响应=一部分自然响应=微分方程的齐次解\\ 零状态响应&≠强迫响应=另一部分自然响应+强迫响应=微分方程的特解 \end{aligned} 全响应全响应自然响应强迫响应零输入响应零状态响应=零输入响应+零状态响应=自然响应+强迫响应=零输入响应+零状态响应中由系统特征根决定的部分=零状态响应中由输入信号特征模式决定的部分=自然响应=一部分自然响应=微分方程的齐次解=强迫响应=另一部分自然响应+强迫响应=微分方程的特解
另外,全响应还可以分解为瞬态响应与稳态响应,瞬态响应指的是系统响应中随着时间的增加而衰减,并且最终完全消失的分量;而那些对着时间的增加一直保留的分量称为稳态响应。
6. 系统的稳定性和因果性分析
- 如果系统对任何一个有界输入,输出也有界,则称该系统为有界输出稳定系统(BIBO稳定系统),简称稳定系统。
即 ∣ x ( t ) ∣ < A |x(t)|∣x(t)∣<A,则 ∣ y ( t ) ∣ < B |y(t)|∣y(t)∣<B