布隆过滤器(BloomFilter)原理 实现和性能测试
目录
- BloomFilter的原理
- 如何确定最优的m和k?
- guava中的BloomFilter
- 使用案例
- 和HashSet对比
- 测试环境
- 测试方式
- BloomFilter vs HashSet
- 在不同fpp下的存储表现
- 参考资料
布隆过滤器(BloomFilter)是一种大家在学校没怎么学过,但在计算机很多领域非常常用的数据结构,它可以用来高效判断某个key是否属于一个集合,有极高的插入和查询效率(O(1)),也非常省存储空间。当然它也不是完美无缺,它也有自己的缺点,接下来跟随我一起详细了解下BloomFilter的实现原理,以及它优缺点、应用场景,最后再看下Google guava包中BloomFilter的实现,并对比下它和HashSet在不同数据量下内存空间的使用情况。
学过数据结构的人都知道,在计算机领域我们经常通过牺牲空间换时间,或者牺牲时间换空间,BloomFilter给了我们一种新的思路——牺牲准确率换空间。是的,BloomFilter不是100%准确的,它是有可能有误判,但绝对不会有漏判断,说通俗点就是,BloomFilter有可能错杀好人,但不会放过任何一个坏人。BloomFilter最大的优点就是省空间,缺点就是不是100%准确,这点当然和它的实现原理有关。
BloomFilter的原理
在讲解BloomFilter的实现前,我们先来了解下什么叫Bitmap(位图),先给你一道《编程珠玑》上的题目。
给你一个有100w个数的集合S,每个数的数据大小都是0-100w,有些数据重复出现,这就意味着有些数据可能都没出现过,让你以O(n)的时间复杂度找出0-100w之间没有出现在S中的数,尽可能减少内存的使用。
既然时间复杂度都限制是O(N)了,意味着我们不能使用排序了,我们可以开一个长为100w的int数组来标记下哪些数字出现过,在就标1,不在标0。但对于每个数来说我们只需要知道它在不在,只是0和1的区别,用int(32位)有点太浪费空间了,我们可以按二进制位来用每个int,这样一个int就可以标记32个数,空间占用率一下子减少到原来的1/32,于是我们就有了位图,Bitmap就是用n个二进制位来记录0-m之间的某个数有没有出现过。
Bitmap的局限在于它的存储数据类型有限,只能存0-m之间的数,其他的数据就存不了了。如果我们想存字符串或者其他数据怎么办?其实也简单,只需要实现一个hash函数,将你要存的数据映射到0-m之间就行了。这里假设你的hash函数产生的映射值是均匀的,我们来计算下一个m位的Bitmap到底能存多少数据?
当你在Bitmap中插入了一个数后,通过hash函数计算它在Bitmap中的位置并将其置为1,这时任意一个位置没有被标为1的概率是:
1 − 1 m 1 - \frac{1}{m} 1−m1
当插入n个数后,这个概率会变成:
( 1 − 1 m ) n (1 - \frac{1}{m})^n (1−m1)n
所以任意一个位置被标记成1的概率就是:
P 1 = 1 − ( 1 − 1 m ) n P_1 = 1 - (1 - \frac{1}{m})^n P1=1−(1−m1)n
这时候你判断某个key是否在这个集合S中时,只需要看下这个key在hash在Bitmap上对应的位置是否为1就行了,因为两个key对应的hash值可能是一样的,所以有可能会误判,你之前插入了a,但是hash(b)==hash(a),这时候你判断b是否在集合S中时,看到的是a的结果,实际上b没有插入过。
从上面公式中可以看出有 P 1 P_1 P1 的概率可能会误判,尤其当n比较大时这个误判概率还是挺大的。 如何减少这个误判率?我们最开始是只取了一个hash函数,如果说取k个不同的hash函数呢!我们每插入一个数据,计算k个hash值,并对k位置为1。在查找时,也是求k个hash值,然后看其是否都为1,如果都为1肯定就可以认为这个数是在集合S中的。
问题来了,用k个hash函数,每次插入都可能会写k位,更耗空间,那在同样的m下,误判率是否会更高呢?我们来推导下。
在k个hash函数的情况下,插入一个数后任意一个位置依旧是0的概率是:
( 1 − 1 m ) k (1 - \frac{1}{m})^k (1−m1)k
插入n个数后任意一个位置依旧是0的概率是:
( 1 − 1 m ) k n (1 - \frac{1}{m})^{kn} (1−m1)kn
所以可知,插入n个数后任意一个位置是1的概率是
1 − ( 1 − 1 m ) k n 1 - (1 - \frac{1}{m})^{kn} 1−(1−m1)kn
因为我们用是用k个hash共同来判断是否是在集合中的,可知当用k个hash函数时其误判率如下。它一定是比上面1个hash函数时误判率要小(虽然我不会证明)
( 1 − [ 1 − 1 m ] k n ) k < ( 1 − [ 1 − 1 m ] n ) \left(1-\left[1-\frac{1}{m}\right]^{k n}\right)^{k} < (1 - \left[1 - \frac{1}{m}\right]^n) (1−[1−m1]kn)k<(1−[1−m1]n)
维基百科也给出了这个误判率的近似公式(虽然我不知道是怎么来的,所以这里就直接引用了)
( 1 − [ 1 − 1 m ] k n ) k ≈ ( 1 − e − k n / m ) k \left(1-\left[1-\frac{1}{m}\right]^{k n}\right)^{k} \approx\left(1-e^{-k n / m}\right)^{k} (1−[1−m1]kn)k≈(1−e−kn/m)k
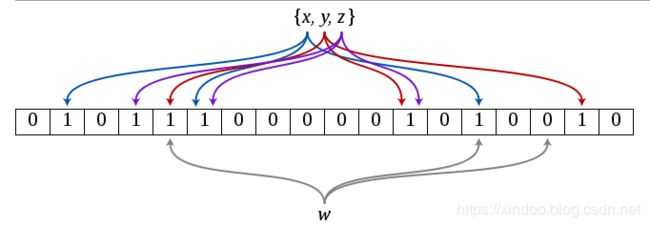
到这里,我们重新发明了Bloomfilter,就是这么简单,说白了Bloomfilter就是在Bitmap之上的扩展而已。对于一个key,用k个hash函数映射到Bitmap上,查找时只需要对要查找的内容同样做k次hash映射,通过查看Bitmap上这k个位置是否都被标记了来判断是否之前被插入过,如下图。
通过公式推导和了解原理后,我们已经知道Bloomfilter有个很大的缺点就是不是100%准确,有误判的可能性。但是通过选取合适的bitmap大小和hash函数个数后,我们可以把误判率降到很低,在大数据盛行的时代,适当牺牲准确率来减少存储消耗还是很值得的。
除了误判之外,BloomFilter还有另外一个很大的缺点 只支持插入,无法做删除。如果你想在Bloomfilter中删除某个key,你不能直接将其对应的k个位全部置为0,因为这些位置有可能是被其他key共享的。基于这个缺点也有一些支持删除的BloomFilter的变种,适当牺牲了空间效率,感兴趣可以自行搜索下。
如何确定最优的m和k?
知道原理后再来了解下怎么去实现,我们在决定使用Bloomfilter之前,需要知道两个数据,一个是要存储的数量n和预期的误判率p。bitmap的大小m决定了存储空间的大小,hash函数个数k决定了计算量的大小,我们当然都希望m和k都越小越好,如何计算二者的最优值,我们大概来推导下。(备注:推导过程来自Wikipedia)
由上文可知,误判率p为
p ≈ ( 1 − e − k n / m ) k ( 1 ) p \approx \left(1-e^{-k n / m}\right)^{k} \ (1) p≈(1−e−kn/m)k (1)
对于给定的m和n我们想让误判率p最小,就得让
k = m n ln 2 ( 2 ) k=\frac{m}{n} \ln2 \ (2) k=nmln2 (2)
把(2)式代入(1)中可得
p = ( 1 − e − ( m n ln 2 ) n m ) m n ln 2 ( 3 ) p=\left(1-e^{-\left(\frac{m}{n} \ln 2\right) \frac{n}{m}}\right)^{\frac{m}{n} \ln 2} \ (3) p=(1−e−(nmln2)mn)nmln2 (3)
对(3)两边同时取ln并简化后,得到
ln p = − m n ( ln 2 ) 2 \ln p=-\frac{m}{n}(\ln 2)^{2} lnp=−nm(ln2)2
最后可以计算出m的最优值为
m = − n ln p ( ln 2 ) 2 m=-\frac{n \ln p}{(\ln 2)^{2}} m=−(ln2)2nlnp
因为误判率p和要插入的数据量n是已知的,所以我们可以直接根据上式计算出m的值,然后把m和n的值代回到(2)式中就可以得到k的值。至此我们就知道了实现一个bloomfilter所需要的所有参数了,接下来让我们看下Google guava包中是如何实现BloomFilter的。
guava中的BloomFilter
BloomFilter无法通过new去创建新对象,而它提供了create静态方法来生成对象,其核心方法如下。
static <T> BloomFilter<T> create(
Funnel<? super T> funnel, long expectedInsertions, double fpp, Strategy strategy) {
checkNotNull(funnel);
checkArgument(
expectedInsertions >= 0, "Expected insertions (%s) must be >= 0", expectedInsertions);
checkArgument(fpp > 0.0, "False positive probability (%s) must be > 0.0", fpp);
checkArgument(fpp < 1.0, "False positive probability (%s) must be < 1.0", fpp);
checkNotNull(strategy);
if (expectedInsertions == 0) {
expectedInsertions = 1;
}
long numBits = optimalNumOfBits(expectedInsertions, fpp);
int numHashFunctions = optimalNumOfHashFunctions(expectedInsertions, numBits);
try {
return new BloomFilter<T>(new LockFreeBitArray(numBits), numHashFunctions, funnel, strategy);
} catch (IllegalArgumentException e) {
throw new IllegalArgumentException("Could not create BloomFilter of " + numBits + " bits", e);
}
}
从代码可以看出,需要4个参数,分别是
- funnel 用来对参数做转化,方便生成hash值
- expectedInsertions 预期插入的数据量大小,也就是上文公式中的n
- fpp 误判率,也就是上文公式中的误判率p
- strategy 生成hash值的策略,guava中也提供了默认策略,一般不需要你自己重新实现
从上面代码可知,BloomFilter创建过程中先检查参数的合法性,之后使用n和p来计算bitmap的大小m(optimalNumOfBits(expectedInsertions, fpp)),通过n和m计算hash函数的个数k(optimalNumOfHashFunctions(expectedInsertions, numBits)),这俩方法的具体实现如下。
static int optimalNumOfHashFunctions(long n, long m) {
// (m / n) * log(2), but avoid truncation due to division!
return Math.max(1, (int) Math.round((double) m / n * Math.log(2)));
}
static long optimalNumOfBits(long n, double p) {
if (p == 0) {
p = Double.MIN_VALUE;
}
return (long) (-n * Math.log(p) / (Math.log(2) * Math.log(2)));
}
其实就是上文中列出的计算公式。
后面插入和查找的逻辑就比较简单了,这里不再赘述,有兴趣可以看下源码,我们这里通过BloomFilter提供的方法列表了解下它的功能就行。
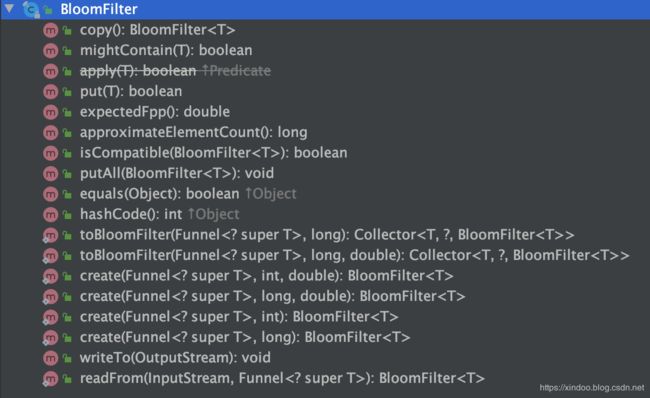
从上图可以看出,BloomFilter除了提供创建和几个核心的功能外,还支持写入Stream或从Stream中重新生成BloomFilter,方便数据的共享和传输。
使用案例
- HBase、BigTable、Cassandra、PostgreSQ等著名开源项目都用BloomFilter来减少对磁盘的访问次数,提升性能。
- Chrome浏览器用BloomFilter来判别恶意网站。
- 爬虫用BloomFilter来判断某个url是否爬取过。
- 比特币也用到了BloomFilter来加速钱包信息的同步。
……
和HashSet对比
我们一直在说BloomFilter有巨大的存储优势,做个优势到底有多明显,我们拿jdk自带的HashSet和guava中实现的BloomFilter做下对比,数据仅供参考。
测试环境
测试平台 Mac
guava(28.1)BloomFilter,JDK11(64位) HashSet
使用om.carrotsearch.java-sizeof计算实际占用的内存空间
测试方式
BloomFilter vs HashSet
分别往BloomFilter和HashSet中插入UUID,总计插入100w个UUID,BloomFilter误判率为默认值0.03。每插入5w个统计下各自的占用空间。结果如下,横轴是数据量大小,纵轴是存储空间,单位kb。
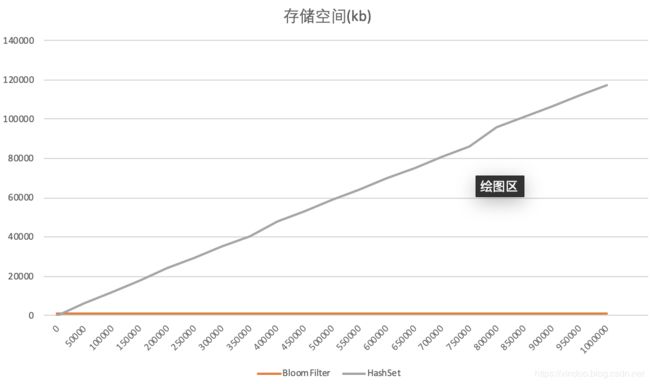
可以看到BloomFilter存储空间一直都没有变,这里和它的实现有关,事实上你在告诉它总共要插入多少条数据时BloomFilter就计算并申请好了内存空间,所以BloomFilter占用内存不会随插入数据的多少而变化。相反,HashSet在插入数据越来越多时,其占用的内存空间也会越来越多,最终在插入完100w条数据后,其内存占用为BloomFilter的100多倍。
在不同fpp下的存储表现
在不同的误判率下,插入100w个UUID,计算其内存空间占用。结果如下,横轴是误判率大小,纵轴是存储空间,单位kb。

fpp,size
0.1,585.453125
0.01,1170.4765625
1.0E-3,1755.5
1.0E-4,2340.53125
1.0E-5,2925.5546875
1.0E-6,3510.578125
1.0E-7,4095.6015625
1.0E-8,4680.6328125
1.0E-9,5265.65625
1.0E-10,5850.6796875
可以看出,在同等数据量的情况下,BloomFilter的存储空间和ln(fpp)呈反比,所以增长速率其实不算快,即便误判率减少9个量级,其存储空间也只是增加了10倍。
参考资料
- wikipedia bloom filter