An Analysis of Visual Question Answering Algorithms翻译
Abstract
在视觉问答(VQA)中,算法必须回答关于图像的基于文本的问题。尽管自2014年末以来,VQA已经创建了多个数据集,但它们在内容和算法评估方式上都存在缺陷。结果,评估分数被夸大了,而且主要是通过回答更简单的问题来决定的,这使得比较不同的方法变得很困难。在本文中,我们使用一个名为任务驱动图像理解挑战(TDIUC)的新数据集来分析现有的VQA算法,该数据集有超过160万个问题,分为12个不同的类别。我们还引入了对给定图像没有意义的问题,以迫使VQA系统对图像内容进行推理。我们提出新的评估方案,以弥补过度代表的问题类型,并使其更容易研究算法的优势和弱点。我们分析了基线和最先进的VQA模型的性能,包括多模态紧致双线性池(MCB)、神经模块网络和循环回答单元。我们的实验建立了注意力如何比其他类别更有助于某些类别,确定哪些模型比其他模型更有效,并解释了简单的模型(例如MLP)如何通过简单地学习回答大的、简单的问题类别来超越更复杂的模型(MCB)。
1. Introduction
在开放式视觉问题解答(VQA)中,算法必须对有关图像的任意基于文本的问题产生答案[21,3]。 VQA是一个令人兴奋的计算机视觉问题,它要求系统能够执行许多任务。 真正解决VQA将是人工智能的一个里程碑,并将极大地促进人机交互。 但是,VQA数据集必须测试广泛的能力,才能充分衡量进度。
VQA的研究始于2014年底,当时DAQUAR数据集已经发布[21]。 包括DAQUAR在内,已经发布了六个主要的VQA数据集,并且算法得到了快速改进。 在最受欢迎的数据集“ VQA数据集” [3]上,最好的算法现在达到了70%的准确性[5](人类表现为83%)。 尽管这些结果令人鼓舞,但现有数据集在多种偏见方面存在严重问题。 此外,由于现有数据集无法将实例分为有意义的类别,因此比较各个算法的功能并不容易。 例如,与回答需要空间推理的问题相比,一种方法在颜色问题上可能更胜一筹。 由于颜色问题在数据集中更为常见,因此,由于使用了评估指标,因此在空间推理方面表现出色的算法将无法获得该功绩的适当奖励。
贡献:我们的论文有四个主要目的,旨在更好地分析和比较VQA算法:1)我们创建了一个新的VQA基准数据集,其中根据其解决的任务将问题分为12个不同的类别; 2)我们提出两个新的评估指标,以补偿数据集偏差的形式; 3)我们平衡是/否对象存在检测问题的数量,以评估均衡分布是否可以帮助算法更好地学习; 4)我们引入了荒谬的问题,这些问题迫使算法确定一个问题对于给定的图像是否有效。然后,我们使用新的数据集重新训练和评估基线和最新VQA算法。我们发现,我们提出的方法可以对VQA算法进行更细微的比较,并有助于我们更好地了解特定技术的优势。此外,它还使我们能够回答有关VQA算法的几个关键问题,例如,“算法的泛化能力是否受到数据集中偏差的阻碍?”,“使用空间注意力是否有助于回答特定的问题类型”,“ VQA算法在回答不太常见的问题上有多成功?”和“ VQA算法能否区分真实问题和荒谬问题?”

2. Background
2.1. Prior Natural Image VQA Datasets
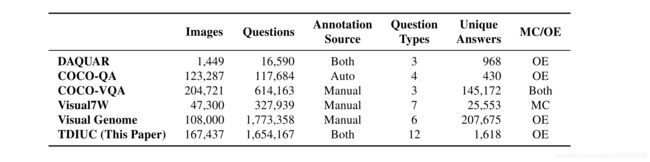
2014年至2016年间,已经发布了六个具有自然图像的VQA数据集:DAQUAR [21],COCO-QA [25],FM-IQA [6],VQA数据集[3],Visual7W [35]和Visual Genome [ 18]。 FM-IQA需要人为判断,尚未得到广泛使用,因此我们不再对其进行进一步讨论。 表1显示了其他数据集的统计信息。 在其他[13、34、29]之后,我们将包含自然图像的VQA数据集部分称为COCO-VQA。 详细的数据集评论可以在[14]和[28]中找到。
前面提到的所有VQA数据集都是有偏差的.DAQUAR和COCO-QA很小,并且问题类型的种类有限。 视觉基因组,Visual7W和COCO-VQA较大,但是它们存在一些偏差。 偏见的形式既有问的各种问题,也有人们为他们提供的答案。 对于COCO-VQA,仅使用问题特征进行训练的系统即可达到50%的准确性[13]。 这表明某些问题具有可预测的答案。 如果没有更细致的分析,确定哪种类型的问题更依赖于图像将是一项挑战。 对于使用Mechanical Turk制作的数据集,注释者通常会询问对象识别问题,例如“图像中有什么?”或“图像中是否有大象?”。 请注意,在后一个示例中,除非对象在图像中,否则注释者很少会问这种问题。 在COCO-VQA上,以“是否存在”开头的问题中有79%的答案是“是”。
2017年,引入了VQA 2.0 [7]数据集。在VQA 2.0中,对于两个不同的图像会询问相同的问题,并且指示注释者给出相反的答案,这有助于减少语言偏见。但是,除了语言偏见外,这些数据集在不同类型问题的分布以及每种问题类型内答案的分布方面也存在偏见。 VQA数据集使用的性能指标将每个测试实例的值均等(例如,简单准确性)。尽管有些人确实为基本问题类型计算了其他统计信息,但并未从这些子评分中计算出总体表现[3,25]。由于更容易产生偏见的问题类型也更加常见,这加剧了带有偏见的问题。与以“ Is”和“ Are”开头的问题相比,注释者很少问“为什么”和“哪里”开头的问题。例如,在COCO-VQA上,“是/不是”问题的准确性提高15%将使整体准确性提高5%以上,但是正确回答所有“为什么/在何处”问题的准确性将仅提高4.1%[14]。由于现有评估指标无法正确解决这些偏差,因此在这些数据集上训练的算法会学习利用这些偏差,从而导致在实际环境中部署时,系统运行不佳。
出于相关原因,过去十年中发布的主要基准测试不使用简单的准确性来评估图像识别和相关的计算机视觉任务,而是使用诸如每类平均值的准确性等指标来补偿不平衡的类别。 例如,在Caltech-101 [4]上,即使使用了平衡的训练数据,简单的准确性也无法解决这样一个事实,即某些类别比其他类别更容易分类(例如,面部和平面很容易且测试次数最多) 图片)。 每类平均准确性通过要求系统在每个类别上都做得很好来弥补这一点,即使类别中测试实例的数量相差很大。
现有基准测试不需要报告不同问题类型的准确性。 即使报告了问题,问题类型也可能过于粗糙而无用,例如,COCO-VQA中的“是/否”,“数字”和“其他”。 为了改善对VQA算法的分析,我们将问题分类为有意义的类型,计算子分数,并将其纳入我们的评估指标。
2.2. Synthetic Datasets that Fight Bias
先前的工作已经研究了VQA中的偏差并提出了对策。 在[33]中,创建了阴和阳数据集来研究对卡通图像具有相同数量的二进制(是/否)问题的影响。 他们发现,很难从平衡的数据集中回答问题。 这项工作意义重大,但仅限于是/否问题,其使用卡通图像的方法无法直接扩展到真实世界的图像。
本文的目标之一是确定算法可以轻松回答哪些类型的问题。在[1]中,提出了具有相似目标的SHAPES数据集。 SHAPES是一个小型数据集,由64个图像组成,这些图像是通过将彩色几何形状按不同的空间方向排列而组成的。每个图像具有相同的244个“是/否”问题,导致15,616个问题。尽管SHAPES是重要的辅助评估,但仅凭它不足以测试VQA算法。 SHAPES的主要局限性在于其所有图像均为2D形状,不能代表真实世界的图像。同样,合成语言和基本视觉推理(CLEVR)[12]也建议使用3D渲染几何对象来研究模型的推理能力。 CLEVR比SHAPES大,并使用3D渲染的几何对象。除了形状和颜色之外,它还为对象增加了材质属性。 CLEVR有五种类型的问题:属性查询,属性比较,整数比较,计数和存在。
SHAPES和CLEVR都是专门为组合语言方法量身定制的[1],并且低估了视觉推理的重要性。 例如,CLEVR问题“大球体上剩下的棕色金属物体所剩圆柱体的大小是多少?”需要苛刻的语言推理能力,但是解析简单的几何对象只需要有限的视觉理解。 与这三个综合数据集不同,我们的数据集包含自然图像和问题。 为了改进算法分析和比较,我们的数据集有更多(12)个明确定义的问题类型和新的评估指标。
3. TDIUC for Nuanced VQA Analysis
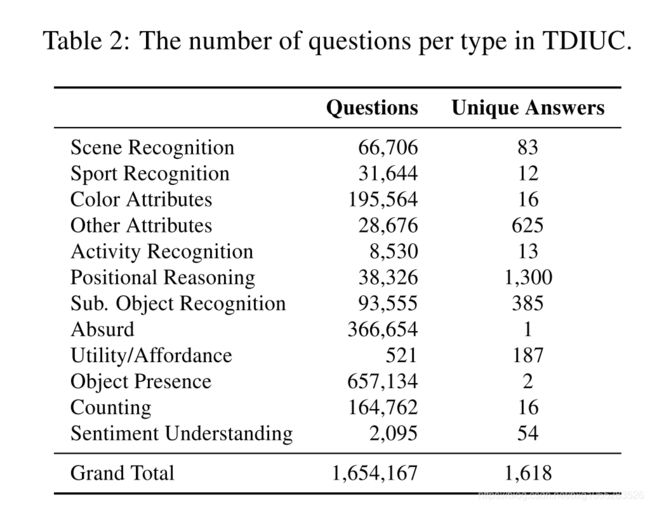
在过去两年中,多个公开发布的数据集刺激了VQA研究。 但是,由于评估指标存在偏差和问题,因此解释和比较VQA系统的性能可能是不透明的。 我们提出了一个新的基准数据集,该数据集明确地将问题分为12个不同的类别。 这样一来,您就可以衡量每个类别中的性能,并了解对于当今最佳系统而言,哪种问题是容易的还是很难的。 此外,我们使用评估指标来进一步补偿偏差。 我们将数据集称为“任务驱动图像理解挑战(TDIUC)”。 表1和图2分别显示了该数据集的总体统计数据和示例图像。
TDIUC有12种类型的问题被选择来代表经典计算机视觉任务和新颖的高级视觉任务,这些任务需要不同程度的图像理解和推理。 问题类型为:
- 1. Object Presence (e.g., ‘Is there a cat in the image?’)(是否有物体)
- 2. Subordinate Object Recognition (e.g., ‘What kind of furniture is in the picture?’)(对象种类识别)
- 3. Counting (e.g., ’How many horses are there?’) (数量)
- 4. Color Attributes (e.g., ‘What color is the man’s tie?’) (颜色)
- 5. Other Attributes (e.g., ‘What shape is the clock?’) (其他属性)
- 6. Activity Recognition (e.g., ‘What is the girl doing?’) (动作识别)
- 7. Sport Recognition (e.g.,‘What are they playing?’)(体育活动识别)
- 8. Positional Reasoning (e.g., ‘What is to the left of the man on the sofa?’)(位置推理)
- 9. Scene Classification (e.g., ‘What room is this?’)(场景分类)
- 10. Sentiment Understanding (e.g.,‘How is she feeling?’)(情绪理解)
- 11. Object Utilities and Affordances (e.g.,‘What object can be used to break glass?’)(用途)
- 12. Absurd (i.e., Nonsensical queries about the image)(错误)
表2给出了TDIUC中每个问题类型的数量。问题来自三个来源。 首先,我们从COCO-VQA和Visual Genome中导入了一部分问题。 其次,我们创建了从COCO的语义分段注释[19]和Visual Genome的对象和属性注释[18]生成问题的算法。 第三,我们使用人工注释器来确定某些问题类型。 在以下各节中,我们简要描述每种方法。
3.1. Importing Questions from Existing Datasets
我们从COCO-VQA和Visual Genome中导入了属于所有问题类型的问题,除了“对象实用程序和提供能力”。 我们通过使用大量的模板和正则表达式来做到这一点。 对于视觉基因组,我们导入了具有一个单词答案的问题。 对于COCO-VQA,我们导入了带有一两个单词答案的问题,并且其中五个或更多注释者同意。
对于颜色问题,如果其中包含单词“ color”且答案是常用颜色,则将导入该问题。 如果答案是九种常见运动之一或十五种常见活动之一,并且该问题包含描述动作或运动(例如玩耍,投掷等)的常见动词,则该问题被分类为活动或运动识别问题。 -答案必须以“有多少”开头,答案必须是一个小的可数整数(1-16)。 其他类别使用正则表达式确定。 例如,形式为“是否在感觉?”的问题被归类为情感理解,而形式“在它的右边/左边/后面是什么?”被归类为位置推理。
同样,“图像中的
3.2. Generating Questions using Image Annotations
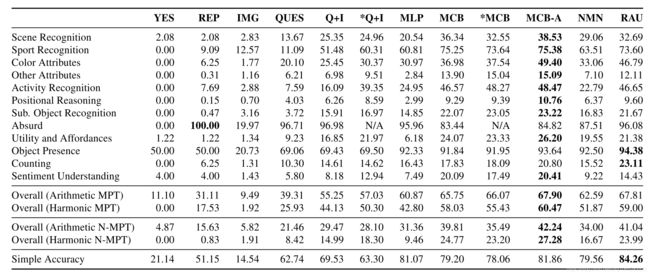
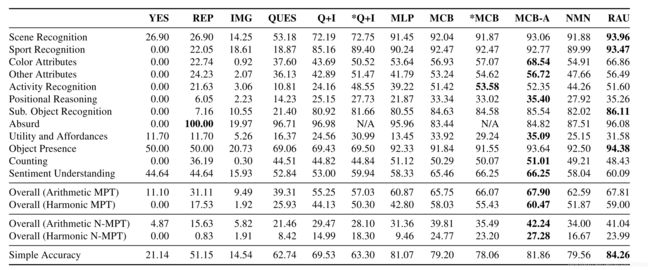
COCO数据集和视觉基因组中的图像都有各自的区域,并附加了语义知识。 我们利用此信息使用问题模板生成新问题。 为了介绍多样性,我们为每种问题类型定义了多个模板,并使用注释来填充它们。 例如,为了计数,我们使用8个模板,例如“有多少 运动识别,计数,从属对象识别,对象存在,场景理解,位置推理和荒谬问题是从COCO创建的,类似于[15]中使用的方案。 为了进行计数,我们对图像注释中的对象实例数进行计数。 为了最大程度地减少歧义,只有在对象覆盖至少2,000像素的区域时才这样做。 为了识别从属对象,我们提出了一些问题,这些问题需要根据对象的较大语义类别来识别对象的从属对象分类。 为此,我们使用COCO超级类别,这是一个语义概念,涵盖同一主题下的多个对象,例如,“家具”超类别包含椅子,沙发等。如果图像仅包含一种类型的家具,则问题类似于 因为答案不是模棱两可,所以生成了“图片中的家具是什么?”。 使用类似的启发式方法,我们会提出有关识别食品,电子设备,厨房设备,动物和车辆的问题。 对于物体存在的问题,我们发现图像的物体面积大于2,000像素,并产生类似于“图片中是否存在<物体>?”的问题,这些问题的答案为“是”。 要创建否定问题,我们会提出有关图像中不存在的COCO对象的问题。 为了使这一点变得更困难,我们优先考虑问题的创建,这些问题是针对缺少对象的问题,这些对象属于图像中存在的对象的同一超类。 与包含沙发和电视相比,街道场景更可能包含卡车和小汽车。 因此,在街景场景中回答“卡车在吗?”比回答“沙发在吗?”要困难得多。 对于运动识别问题,我们会在注释中检测到特定运动设备的存在,并询问有关所进行运动类型的问题。 图片只能包含一项特定运动的运动器材。 使用类似的方法来创建场景理解问题。 例如,如果注释中有厕所和水槽,则该房间就是浴室,并且可以创建适当的场景识别问题。 此外,我们使用超级类别“室内”和“室外”来询问有关拍摄照片的位置的问题。 荒谬的问题测试了算法根据图像内容判断问题何时无法回答的能力。 为此,我们列出给定图像中不存在的对象的列表,然后从TDIUC的其余部分中查找有关这些不存在的对象的问题,是/否和计数问题除外,其中包括导入的问题 来自COCO-VQA,自动生成的问题和手动创建的问题。 我们列出了每张图片都会“荒谬”的所有可能问题,并且我们统一为每张图片采样了三个问题。 实际上,我们将在整个数据集中多次重复相同的问题,在这个问题上它可以是真实问题,也可以是无意义的问题。 如果问题很荒谬,算法必须回答“不适用”。 Visual Genome的注释包含区域描述,关系图和对象边界。 但是,注释既可以是非详尽的,也可以是重复的,这使得使用它们自动使质量检查对变得困难。 我们仅使用Visual Genome提出颜色和位置推理问题。 我们使用的方法与COCO所使用的方法相似,但是由于注释中的古怪之处,因此需要采取其他预防措施。 附录中提供了其他详细信息。 使用模板无法轻松创建情感理解和对象效用/负担问题,因此我们使用手动注释来创建这些模板。 培训了12位志愿者注释者来生成这些问题,他们使用了我们开发的基于Web的注释工具。 向他们显示了来自COCO和Visual Genome的随机图像,还可以上传图像。 对所有来源的问题都进行了后处理。 所有数字都转换为文本,例如2变成了2。 所有答案均转换为小写,并且删除了标点符号。 删除同一图像的重复问题。 所有问题的答案必须至少出现两次。 数据集被分为训练和测试分割,其中训练占70%,测试占30%。 VQA研究的主要目标之一是构建能够执行许多任务的计算机视觉系统,而不是仅对一项特定任务具有专业知识(例如,对象识别)。 因此,有人认为VQA是一种视觉图灵测试[21]。 但是,如果使用简单的准确性来评估性能,则很难知道系统是否成功达到了此目标,因为某些问题类型比其他问题类型具有更多的问题。 在VQA中,预期问题类型的分布偏斜。 如果每个测试问题都得到同等对待,则很难评估在较罕见的问题类型上的表现并弥补偏差。 我们提出了多种措施来补偿偏差和偏斜分布。 为了补偿偏斜的问题类型分布,我们分别计算了12种问题类型的准确性。 但是,拥有最终的统一精度指标也很重要。 我们的总体指标是每个问题类型的所有准确性的算术和谐波均值,分别称为算术平均类型(Arithmetic MPT)准确性和谐波平均类型准确性(Harmonic MPT)。 与算术MPT不同,谐波MPT衡量系统在所有问题类型上均具有高分并偏向性能最低的类别的能力。 我们还使用归一化的指标,以每种问题类型内答案分布不平衡的形式补偿偏差,例如,重复次数最多的“两个”涵盖了所有计数类型问题的35%以上。 为此,我们分别计算问题类型中每个唯一答案的准确性,然后将它们平均化为问题类型。 为了计算总体性能,我们计算算术归一化平均类型(N-MPT)和谐波N-MPT分数。 未归一化的分数与归一化的分数之间的巨大差异表明,该算法无法推广到更稀有的答案。 尽管有其他公式(例如[6,10]),但大多数VQA系统将其公式化为分类问题,在该问题中,系统会给出图像和问题,并给出答案作为类别。 [3、25、5、27、9、16、11、20、24、26、29、31、32、34、10、22]。 几乎所有系统都使用CNN功能来表示图像,并使用递归神经网络(RNN)或用于问题的词袋模型。 我们简要回顾其中一些系统,重点关注我们在实验中比较的模型。 有关更全面的评论,请参见[14]和[28]。 两个简单的VQA基线是线性或多层感知器(MLP)分类器,它们将问题和图像嵌入彼此串联在一起作为输入[3、13、34],其中图像特征来自CNN的最后一个隐藏层。 这些简单的方法通常效果很好,并且可以与复杂的注意力模型竞争[13,34]。 在VQA模型中[5,27,32,30,31,20,9]对空间注意力进行了大量研究。 这些系统会根据与问题的相关性来权衡视觉特征,而不是使用全局特征(例如,从CNN的最后一个隐藏层开始)。 例如,回答“熊是什么颜色?”的目的是强调熊周围的视觉特征,而抑制其他特征。 MCB系统[5]赢得了CVPR-2016 VQA车间挑战赛。 除了使用空间注意力之外,它还隐式计算图像和问题特征之间的外部乘积,以确保它们的所有元素都相互作用。 显式地计算外部乘积将是缓慢的并且具有极高的尺寸,因此可以使用有效的近似来完成。 它使用一个长短期记忆(LSTM)网络来嵌入问题。 神经模块网络(NMN)是VQA的一种特别有趣的合成方法[1,2]。 主要思想是组成一系列离散模块(子网),这些模块可以一起执行以回答给定的问题。 为此,他们使用各种模块,例如,find(x)模块输出用于检测x的热图。 为了安排模块,首先将问题解析为简洁的表达式(称为S表达式),例如,“什么在汽车的右边?”被解析为(什么汽车);(什么正确);(什么 (和汽车右))。 使用这些表达式,模块被组合成一个序列来回答查询。 VQA的多步递归应答单元(RAU)模型是另一种最新方法[23]。 RAU中的每个推理步骤都包含一个完整的回答模块,该模块接受图像,问题和上一个LSTM步骤的输出。 这些中的每一个都是一个较大的LSTM网络的一部分,该网络逐渐地对该问题进行推理。 我们在TDIUC上训练了多个基线模型以及最新的VQA方法。 我们使用的方法是: 对于图像功能,所有模型均使用具有448×448图像的ResNet-152 [8]。 QUES和IMG提供有关数据集中偏差的信息。 QUES,Q + I和MLP都使用4800维跳跃思想向量[17]来嵌入问题,就像在[13]中所做的那样。 对于图像功能,所有这些都使用标准化为单位长度的ResNet-152的“ pool5”层。 MLP是具有softmax输出层的4层网络。 3个ReLU隐藏层分别具有6000、4000和2000个单位。 在训练期间,对隐藏层使用了落差(0.3)。 对于MCB,MCB-A,NMN和RAU,我们使用了公开代码在TDIUC上进行训练。 除了将NMN和RAU的视觉表示升级为都使用ResNet-152之外,实验设置和超级参数与代码的默认选择保持不变。 这些模型在TDIUC上的结果在表3中给出。表3中12种问题类型的每一种的准确率得分都在表3中给出,附录5在表5中给出了使用均值唯一答案进行归一化的得分。 通过查看表3,我们可以发现在MPT下某些问题类型相对容易(> 90%):场景识别,运动识别和物体存在。 荒谬的情况下也可以实现高精度,我们将在7.4节中进行更详细的讨论。 尽管有大量独特的答案,但从属对象的识别率仍较高(> 80%)。 尽管有大量训练数据,但所有方法的计数准确性均很低。 对于其余的问题类型,需要进行更多分析以查明性能较弱是由于训练数据量较少,偏倚还是模型限制所致。 接下来,我们将研究N-MPT可以弥补多少良好的性能是由于答案分布的偏差。 我们的主要目标之一是通过简单地学习回答更多且更简单的问题类型来弥补算法可以取得高分这一事实。对于现有的数据集,早期的工作表明,使用简单的精度,简单的基线方法通常会比更复杂的方法[13,34,10]。在TDIUC上,MLP的简单准确性超过了MCB和NMN,但仔细检查后发现,MLP的得分高度取决于类别众多的类别(例如“荒谬”和“对象存在”)的性能。使用MPT,我们发现NMN和MCB均胜过MLP。检查每种问题类型的标准化分数(附录表5)显示出更加明显的差异,这也反映在表3所示的算术N-MPT分数中。这表明MLP容易过拟合。与RAU相比,MCB-A的效果要好于简单的精度,但RAU在所有旨在补偿偏斜的答案分布和偏见的指标上得分都较低。 比较未归一化和归一化度量可以帮助我们确定给定问题类型的VQA算法的归纳能力。这些分数之间的巨大差异表明,算法依赖于偏斜的答案分布来获得高分数。我们发现,对于MCB-A,从属对象识别的准确性从未归一化的85.54%降至归一化的23.22%,而对于场景识别,其准确率从93.06%(未归一)降至38.53%(归一)。这两个类别的答案分布都严重偏斜。从属对象识别中的前25个答案和场景识别中的前5个答案涵盖了各自问题类型中所有问题的80%以上。这表明看似简单的问题类型可能仅仅是由于算法学习了答案统计信息。真正简单的问题类型在未规范化和规范化指标方面的表现都相似。例如,尽管计数具有相同数量的唯一答案和更多的训练数据,但运动识别仅下降了17.39%,而计数下降了30.21%。通过比较规范化和未规范化指标之间性能的相对下降,我们还可以比较算法的泛化能力,例如,对于从属对象识别,RAU与MCB-A(85.54%)相比具有更高的非规范化分数(86.11%)。但是,对于归一化分数,MCB-A的性能(23.22%)明显高于RAU(21.67%)。这表明RAU可能更多地取决于答案分布。与MCB相比,可以对MLP进行类似的观察。 在上一节中,我们看到了VQA模型难以正确预测稀有答案。重复次数少的问题实际上难于回答,还是算法只是偏向更频繁的答案?为了对此进行研究,我们创建了TDIUC的子集,该子集仅包含答案重复少于1000次的问题。我们称此数据集为TDIUC-Tail,其中包含46,590个训练和22,065个测试问题。然后,我们在以下方面训练了MCB:1)完整的TDIUC数据集;和2)TDIUC尾巴。两种版本均在TDIUC-Tail的验证版上进行了评估。 荒谬的问题迫使VQA系统查看图像以回答问题。 在TDIUC中,这些问题是从其余数据集中采样的,并且有很高的先验概率被回答为“不适用”。这在QUES模型中得到了证实,这在荒谬的情况下实现了很高的准确性; 但是,对于相同的问题,如果它们是图像的真品,则只能在这些问题上达到6.77%的准确性。 通过牺牲其他类别的性能可以实现良好的荒谬性能。 一个强大的VQA系统应该能够检测出荒谬的问题,而不会失败。 通过检查与荒谬问题相同的真实问题的准确性,我们可以量化算法将荒谬问题与真实问题区分开的能力。 我们发现,较复杂的模型(MCB:62.44%,MCB-A:68.83%),较简单的模型在这些问题上的准确性要低得多(QUES:6.77%,Q + I:34%)。 为了进一步研究这一点,我们训练了两种VQA系统,即Q + I和MCB,有无荒谬。结果列于表3。与没有完整问题的Q + I相比,对于经过培训的Q + I没有其他荒谬的问题,其他类别的准确度有了显着提高,尤其是对于用于抽样荒唐问题的问题类型,例如活动识别(使用荒谬的训练时为24%,没有训练时为48%)。在没有荒诞的情况下训练的Q + I模型的算术MPT准确性(57.03%)也比在荒谬的情况下训练的模型的MPT精度要高(除荒谬性以外,所有类别的MPT准确性均为51.45%)。这表明Q + I不能正确地区分荒谬和真实的问题,并且倾向于将真正的问题误认为是荒谬的。相比之下,功能更强大的模型MCB产生的荒谬结果更糟,但是在没有荒诞的情况下训练的版本与Q + I相比,差异要小得多,这表明MCB更具有识别荒谬问题的能力。 在7.3节中,我们看到偏斜的答案分布会影响泛化。即使对于简单的问题,此效果也很强,甚至影响最复杂的算法。当MCB-A在COCO-VQA和视觉基因组上接受培训时,请考虑一下MCB-A,即CVPR-2016 VQA Workshop Challenge的获胜者。当根据来自TDIUC的对象存在问题进行评估时,该问题包含50%的“是”和50%的“否”问题,它可以正确地以86.3%的准确度预测“是”的答案,而对于“否”的问题则仅为11.2%。回答。然而,在TDIUC上对其进行训练后,MCB-A能够通过“了解” COCO-VQA数据集的偏见获得95.02%的“是”和“ 92.26%”的“否”。数据集无偏时的性能良好。在[33]中也有关于平衡是/否问题的类似观察。数据集可以平衡简单的类别(例如对象存在),但是将相同的概念扩展到所有其他类别是一项艰巨的任务,并且破坏了现实世界的自然统计数据。采用平均平均值和归一化的准确性度量标准可以帮助弥补此问题。 通过将问题分解成各种类型,我们可以评估哪些类型最受关注。 我们通过比较有无注意的MCB模型(即MCB和MCB-A)来做到这一点。 如表3所示,注意力有助于改善几个问题类别的结果。 最明显的增加是颜色识别,属性识别,荒谬和计数。 所有这些问题类型均要求算法检测正确答案的指定对象(或缺少指定对象)。 MCB-A使用来自不同空间位置的局部特征而不是全局图像特征来计算注意力。 这有助于定位单个对象。 注意机制了解这些功能的相对重要性。 RAU还利用空间注意力并显示相似的增量。 NMN和较小的RAU提出了VQA的组合方法。 对于COCO-VQA,使用简单的精度,NNN的性能比某些MLP模型差[13]。 对于希望逐步进行逻辑分析图像的问题(例如位置推理),我们希望它会比其他模型具有更好的性能。 但是,尽管使用MPT和N-MPT度量标准,NNN的表现要好于MLP,但在特定问题类型上我们没有看到任何实质性的好处。 这可能是因为NMN受“ S表达式”解析器质量的限制,该解析器在许多情况下会产生错误或误导性的解析。 例如,“最左边的那个人的外套是什么颜色?”被解析为(彩色外套);(彩色假);(彩色(和外套假))。 这种表达方式不仅无法解析“男人”(这是正确回答问题所必需的关键要素),而且还会错误地将“左”解释为休假的过去式。 RAU对多个跃点执行推理,并且由于每个跃点都包含完整的VQA系统,因此它可以学习在每个步骤中解决不同的任务。 由于它是端到端训练的,因此不需要依赖严格的问题解析。 它在检测荒谬问题上显示出非常好的性能,并且在其他类别上也表现出色。 我们介绍了TDIUC,这是一个VQA数据集,它由12种明确定义的问题类型(包括荒谬的问题)组成,并用它来对最新的VQA算法进行严格的分析。 我们提出了新的评估指标来补偿VQA数据集中的偏差。 结果表明,荒谬的问题和新的评估指标使人们对VQA算法的行为有了更深入的了解。3.2.1 Questions Using COCO annotations
为了创建位置推理问题,我们使用边界框的相对位置来创建类似于“ <对象>的左边/右边是什么?”的问题,由于对象重叠,这可能是模棱两可的,因此我们采用以下试探法来消除 歧义:1)两个边界框之间的垂直距离应在较小的阈值之内; 2)物体的重叠长度不得超过对应物长度的一半; 3)物体在水平方向上的距离不应超过距离阈值,而距离阈值是通过主观判断最佳距离以减少歧义而确定的。 我们尝试生成上方/下方的问题,但结果不可靠。3.2.2 Questions Using Visual Genome annotations
3.3. Manual Annotation
3.4. Post Processing Post
4. Proposed Evaluation Metric
5. Algorithms for VQA
6. Experiments
7. Detailed Analysis of VQA Models
7.1. Easy Question-Types for Today’s Methods
7.2. Effects of the Proposed Accuracy Metrics
7.3. Can Algorithms Predict Rare Answers?
我们发现,在所有问题类型上仅接受TDIUC-Tail训练的MCB胜过接受所有TDIUC训练的MCB(详细信息在附录表6和表7中)。这表明MCB能够学习正确预测稀有答案,但是它偏向于预测更常见的答案以最大化整体准确性。使用归一化的准确性会削弱VQA算法对答案统计信息的依赖,并且对于部署VQA系统,直接针对N-MPT优化可能会有用。7.4. Effects of Including Absurd Questions
7.5. Effects of Balancing Object Presence
7.6. Advantages of Attentive Models
7.7. Compositional and Modular Approaches
8. Conclusion