如何自制自平衡云台基于mpu6050,arduino输出三维倾斜角度的方法(含源码,库)
智能小制作(含源码、库)-自平衡云台-输出三维倾斜角度,基于mpu6050、arduino
目录
- 智能小制作(含源码、库)-自平衡云台-输出三维倾斜角度,基于mpu6050、arduino
- 准备知识
- 介绍、思路
- mpu6050六轴姿态传感器介绍
- 其他硬件介绍
- 制作
- 所需材料
- 接线
- 库文件
- 感谢阅读
- 源代码
准备知识
介绍、思路
当你需要保持一个物品的平衡,或者需要得到物品倾斜的角度,不妨看看下面文章,下面内容即是实现这一功能
功能:
当你的立足的空间倾斜或者角度改变时,在自平衡稳定器将保持平衡或保持一定角度,防止倾斜导致不利的结果。
稍微修改也可以用于输出空间俯仰、滚转、偏航三个方向的倾斜角度
实现思路
通过处理arduino使用六轴姿态传感器得到的原始数据,得到空间俯仰、滚转、偏航三个方向的倾斜角度,进而arduino控制舵机的角度,达到自我平衡的效果,当然这里也可以使用LCD、OLED等输出俯仰、滚转、偏航三个方向的倾斜角度
示例这里使用的舵机可能或出现抖动的情况,需要要求精度,可以使用伺服电机或其他设备
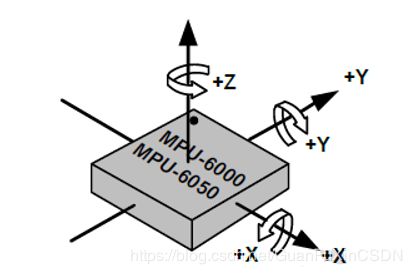
mpu6050六轴姿态传感器介绍
MPU-6000为全球首例整合性6轴运动处理组件,整合了3轴陀螺仪、3轴加速器,解决了组合陀螺仪与加速器时存在的一些问题问题,还包含了内建的温度感测器、DMP(Digital Motion Processor)
DMP:可以直接输出四元数,减少复杂的融合演算数据、感测器同步化、姿势感应等的负荷
MPU-6000的角速度感测范围为±250、±500、±1000与±2000°/sec (dps),可以准确捕捉快速与慢速动作,用户可程式控制的加速器全格感测范围为±2g、±4g±8g与±16g。产品传输可透过最高至400kHz的I2C或最高达20MHz的SPI。
应用
-
现实增强
-
电子稳像 (EIS: Electronic Image Stabilization)
-
光学稳像(OIS: Optical Image Stabilization)
-
行人导航器
-
姿势快捷方式
-
平衡车
-
飞行器呀
-
双足机器人

其他硬件介绍
由于在我的其他博客已经写过,就不在这里啰嗦了
舵机介绍:
创客小制作(含源代码)《RFID控制器》,用于智能门禁、物流追踪、控制开关等,基于Arduino
arduino介绍:
Arduino小白入门全解,学习笔记
LCD介绍:
Arduino实践(二)lcd1602使用说明,源码

制作
所需材料
- Arduino
- mpu6050六轴姿态传感器
- 舵机 —或更高级的伺服电机
- 支架(自行选择)
- 杜邦线
可选
LCD、OLED
接线
MPU6050 引脚说明
| MPU6050 引脚 | Arduino引脚 |
|---|---|
| VCC | 5V |
| GND | 地线 |
| SCL | MPU6050作为从机时IIC时钟线 |
| SDA | MPU6050作为从机时IIC数据线 |
| XCL | MPU6050作为主机时IIC时钟线 |
| XDA | MPU6050作为主机时IIC数据线 |
| AD0 | 地址管脚,该管脚决定了IIC地址的最低一位 |
| INT | 中断引脚 |
在本项目中只需要接VCC、GND 、SCL、SDA
舵机引脚说明
所有的舵机都有外接三根线,分别用棕、红、橙(黄)三种颜色进行区分,由于舵机品牌不同,颜色也会有所差异,棕色为接地线,红色为电源正极线,橙(黄)色为信号线
关于支架根据自己选择的支架安装,这里不详细说明
库文件
MPU6050.zip
https://download.csdn.net/download/GuanFuXinCSDN/12248710
I2Cdev.zip
https://download.csdn.net/download/GuanFuXinCSDN/12248704
说明
这两个zip文件内都包含了.h 和 .cpp文件,将两个文件解压放到arduino代码的同目录下即可正常使用
感谢阅读
持续更新arduino 树莓派 python Linux c语言等等
接到有帮助的话 求点赞 求关注❤️ 求分享
有问题可以评论
点关注,不迷路
如果有任何错误,如何建议,请批评指教,不胜感激 !
源代码
#include "Wire.h"
#include "I2Cdev.h"
#include "MPU6050.h"
/*舵机*/
#include