UART/USART串口通信二:实验
三大实验
- 前言
- 1.单片机给上位机发送数据,上位机打印出来数据
- 1.1 硬件设计
- 1.2 软件设计
- 2.电脑上位机给单片机发数据,单片机接收到数据之后立马发回给电脑,并打印出来
- 2.1 硬件设计
- 2.2 软件设计
- 3.电脑给单片机发命令,用于控制开发板上的RGB灯。
- 3.1 硬件设计
- 3.2 软件设计
- 总结:库函数开发STM外设的一般原理
前言
理论部分完了,接下来就是实验。
有下面三个实验
电脑使用到了串口调试助手。网上可以搞到很多。
1.单片机给上位机发送数据,上位机打印出来数据
1.1 硬件设计
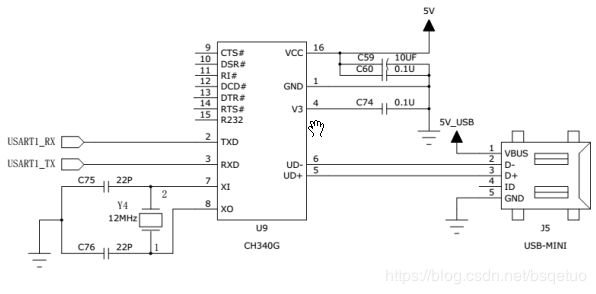
为利用 USART 实现开发板与电脑通信,需要用到一个 USB 转 USART 的 IC,我们选择 CH340G 芯片来实现这个功能, CH340G 是一个 USB 总线的转接芯片,实现 USB 转USART、 USB 转 lrDA 红外或者 USB 转打印机接口,我们使用其 USB 转 USART 功能。
将 CH340G 的 TXD 引脚与 USART1 的 RX 引脚连接, CH340G 的 RXD 引脚与USART1 的 TX 引脚连接。 CH340G 芯片集成在开发板上,其地线(GND)已与控制器的GND 连通。\使用时电脑上记得安装CH340驱动
1.2 软件设计
编程要点:
1-初始化串口需要用到的GPIO
2-初始化串口,USART_InitTypeDef
3-使能串口
4-编写发送和接收函数
5-编写中断服务函数
//1-初始化串口需要用到的GPIO
void GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 打开串口 GPIO 的时钟
USART_GPIO_APBxClkCmd(USART_GPIO_CLK, ENABLE);
// 将 USART Tx 的 GPIO 配置为推挽复用模式
GPIO_InitStructure.GPIO_Pin = USART_TX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(USART_TX_GPIO_PORT, &GPIO_InitStructure);
// 将 USART Rx 的 GPIO 配置为浮空输入模式
GPIO_InitStructure.GPIO_Pin = USART_RX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(USART_RX_GPIO_PORT, &GPIO_InitStructure);
}
//2-初始化串口,USART_InitTypeDef
void USART_Config(void)
{
USART_InitTypeDef USART_InitStructure;
// 打开串口外设的时钟
USART_APBxClkCmd(USART_CLK, ENABLE);
// 配置串口的工作参数
// 配置波特率
USART_InitStructure.USART_BaudRate = USART_BAUDRATE;
// 配置 针数据字长 8位
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
// 配置停止位 1位
USART_InitStructure.USART_StopBits = USART_StopBits_1;
// 配置校验位 没有
USART_InitStructure.USART_Parity = USART_Parity_No ;
// 配置硬件流控制 没有
USART_InitStructure.USART_HardwareFlowControl =
USART_HardwareFlowControl_None;
// 配置工作模式,收发一起
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
// 完成串口的初始化配置
USART_Init(USARTx, &USART_InitStructure);
// 使能串口接收中断
USART_ITConfig(USARTx, USART_IT_RXNE, ENABLE);
// 使能串口
USART_Cmd(USARTx, ENABLE);
}
//初始化
void USART_Configuration(void)
{
GPIO_Config();
USART_Config();
//NVIC_Configuration();
}
下面有一些发送数据的函数
/* 发送一个字节 */
void Usart_SendByte(USART_TypeDef* pUSARTx, uint8_t data)
{
USART_SendData(pUSARTx, data);
while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET );
}
/* 发送两个字节的数据 */
void Usart_SendHalfWord(USART_TypeDef* pUSARTx, uint16_t data)
{
uint8_t temp_h,temp_l;
temp_h = (data&0xff00) >> 8 ;
temp_l = data&0xff;
USART_SendData(pUSARTx, temp_h);
while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET );
USART_SendData(pUSARTx, temp_l);
while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET );
}
/* 发送8位数据的数组 */
void Usart_SendArray(USART_TypeDef* pUSARTx, uint8_t *array,uint8_t num)
{
uint8_t i;
for( i=0; i<num; i++ )
{
Usart_SendByte(pUSARTx, array[i]);
}
while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TC) == RESET );
}
/* 发送字符串 */
void Usart_SendStr(USART_TypeDef* pUSARTx, uint8_t *str)
{
uint8_t i=0;
do
{
Usart_SendByte(pUSARTx, *(str+i));
i++;
}while(*(str+i) != '\0');
while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TC) == RESET );
}
///重定向c库函数printf到串口,重定向后可使用printf函数
int fputc(int ch, FILE *f)
{
/* 发送一个字节数据到串口 */
USART_SendData(USARTx, (uint8_t) ch);
/* 等待发送完毕 */
while (USART_GetFlagStatus(USARTx, USART_FLAG_TXE) == RESET);
return (ch);
}
///重定向c库函数scanf到串口,重写向后可使用scanf、getchar等函数
int fgetc(FILE *f)
{
/* 等待串口输入数据 */
while (USART_GetFlagStatus(USARTx, USART_FLAG_RXNE) == RESET);
return (int)USART_ReceiveData(USARTx);
}
main.c
#include "stm32f10x.h" // 相当于51单片机中的 #include 2.电脑上位机给单片机发数据,单片机接收到数据之后立马发回给电脑,并打印出来
2.1 硬件设计
与实验一的硬件设计相同
2.2 软件设计
相比较实验一多了中断初始化和中断服务程序
编程要点:
1-初始化串口需要用到的GPIO
2-初始化串口,USART_InitTypeDef
3-中断配置(接收中断,中断优先级)
4-使能串口
5-编写发送和接收函数
6-编写中断服务函数
//3-中断配置(接收中断,中断优先级)
static void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* 嵌套向量中i断控制器组选择 */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
/* 配置USART为中断源 */
NVIC_InitStructure.NVIC_IRQChannel = USART_IRQ;
/* 抢断优先级*/
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
/* 子优先级 */
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
/* 使能中断 */
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
/* 初始化配置NVIC */
NVIC_Init(&NVIC_InitStructure);
}
中断服务函数:
void DEBUG_USART_IRQHandler(void)
{
uint8_t ucTemp;
if (USART_GetITStatus(USARTx,USART_IT_RXNE)!=RESET)
{
ucTemp = USART_ReceiveData( USARTx );
USART_SendData(USARTx,ucTemp);
}
}
3.电脑给单片机发命令,用于控制开发板上的RGB灯。
3.1 硬件设计
由于要控制一个RGB灯,会添加一个灯的硬件设计
3.2 软件设计
在前两个程序里加了一段:
#include "stm32f10x.h" // 相当于51单片机中的 #include 总结:库函数开发STM外设的一般原理
一般步骤: