Python人脸图像特征提取(HOG、Dlib、CNN方法)
Python人脸图像特征提取(HOG、Dlib、CNN方法)
- 一、HOG人脸图像特征提取
- 1、HOG特征:
- 1) 主要思想:
- 2) 实现方法:
- 3) 性能提高:
- 4) 优点
- 2、HOG特征提取算法的实现过程:
- 二、Dlib人脸图像特征提取
- 1.Dlib介绍
- 2.主要特点
- 三、卷积神经网络人脸图像特征提取
- 1、卷积神经网络简介
- 2、卷积神经网络结构
- 1) 输入层
- 2) 隐含层
- 卷积层
- 池化层
- 输出层
一、HOG人脸图像特征提取
1、HOG特征:
方向梯度直方图(Histogram of Oriented Gradient, HOG)特征是一种在计算机视觉和图像处理中用来进行物体检测的特征描述子。它通过计算和统计图像局部区域的梯度方向直方图来构成特征。Hog特征结合SVM分类器已经被广泛应用于图像识别中,尤其在行人检测中获得了极大的成功。需要提醒的是,HOG+SVM进行行人检测的方法是法国研究人员Dalal在2005的CVPR上提出的,而如今虽然有很多行人检测算法不断提出,但基本都是以HOG+SVM的思路为主。
1) 主要思想:
在一副图像中,局部目标的表象和形状能够被梯度或边缘的方向密度分布很好地描述。其本质为:梯度的统计信息,而梯度主要存在于边缘的地方。
Hog特征结合SVM分类器已经被广泛应用于图像识别中,尤其在行人检测中获得了极大的成功。
2) 实现方法:
首先将图像分成小的连通区域,这些连通区域被叫做细胞单元。然后采集细胞单元中各像素点的梯度的或边缘的方向直方图。最后把这些直方图组合起来,就可以构成特征描述符。
3) 性能提高:
将这些局部直方图在图像的更大的范围内(叫做区间)进行对比度归一化,可以提高该算法的性能,所采用的方法是:先计算各直方图在这个区间中的密度,然后根据这个密度对区间中的各个细胞单元做归一化。通过这个归一化后,能对光照变化和阴影获得更好的效果。
4) 优点
与其他的特征描述方法相比,HOG有很多优点。首先,由于HOG是在图像的局部方格单元上操作,所以它对图像几何的和光学的形变都能保持很好的不变性,这两种形变只会出现在更大的空间领域上。其次,在粗的空域抽样、精细的方向抽样以及较强的局部光学归一化等条件下,只要行人大体上能够保持直立的姿势,可以容许行人有一些细微的肢体动作,这些细微的动作可以被忽略而不影响检测效果。因此HOG特征是特别适合于做图像中的人体检测的。
2、HOG特征提取算法的实现过程:
HOG特征提取方法就是将一个image:
1)灰度化(将图像看做一个x,y,z(灰度)的三维图像);
2)采用Gamma校正法对输入图像进行颜色空间的标准化(归一化);目的是调节图像的对比度,降低图像局部的阴影和光照变化所造成的影响,同时可以抑制噪音的干扰;
3)计算图像每个像素的梯度(包括大小和方向);主要是为了捕获轮廓信息,同时进一步弱化光照的干扰。
4)将图像划分成小cells(例如6*6像素/cell);
5)统计每个cell的梯度直方图(不同梯度的个数),即可形成每个cell的descriptor;
6)将每几个cell组成一个block(例如3*3个cell/block),一个block内所有cell的特征descriptor串联起来便得到该block的HOG特征descriptor。
7)将图像image内的所有block的HOG特征descriptor串联起来就可以得到该image(你要检测的目标)的HOG特征descriptor了。这个就是最终的可供分类使用的特征向量了。
HOG特征提取流程图:

具体每一步的详细过程如下:
- 标准化gamma空间和颜色空间
为了减少光照因素的影响,首先需要将整个图像进行规范化(归一化)。在图像的纹理强度中,局部的表层曝光贡献的比重较大,所以,这种压缩处理能够有效地降低图像局部的阴影和光照变化。因为颜色信息作用不大,通常先转化为灰度图;
- 计算图像梯度
计算图像横坐标和纵坐标方向的梯度,并据此计算每个像素位置的梯度方向值;求导操作不仅能够捕获轮廓,人影和一些纹理信息,还能进一步弱化光照的影响。
最常用的方法是:简单地使用一个一维的离散微分模板在一个方向上或者同时在水平和垂直两个方向上对图像进行处理,更确切地说,这个方法需要使用滤波器核滤除图像中的色彩或变化剧烈的数据
- 构建方向的直方图
细胞单元中的每一个像素点都为某个基于方向的直方图通道投票。投票是采取加权投票的方式,即每一票都是带有权值的,这个权值是根据该像素点的梯度幅度计算出来。可以采用幅值本身或者它的函数来表示这个权值,实际测试表明: 使用幅值来表示权值能获得最佳的效果,当然,也可以选择幅值的函数来表示,比如幅值的平方根、幅值的平方、幅值的截断形式等。细胞单元可以是矩形的,也可以是星形的。直方图通道是平均分布在0-1800(无向)或0-3600(有向)范围内。经研究发现,采用无向的梯度和9个直方图通道,能在行人检测试验中取得最佳的效果。

- 将细胞单元组合成大的区间
由于局部光照的变化以及前景-背景对比度的变化,使得梯度强度的变化范围非常大。这就需要对梯度强度做归一化。归一化能够进一步地对光照、阴影和边缘进行压缩。

采取的办法是:把各个细胞单元组合成大的、空间上连通的区间。这样,HOG描述符就变成了由各区间所有细胞单元的直方图成分所组成的一个向量。这些区间是互有重叠的,这就意味着:每一个细胞单元的输出都多次作用于最终的描述器。
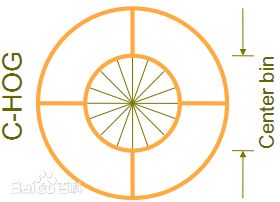
区间有两个主要的几何形状——矩形区间(R-HOG)和环形区间(C-HOG)R-HOG区间大体上是一些方形的格子,它可以有三个参数来表征:每个区间中细胞单元的数目、每个细胞单元中像素点的数目、每个细胞的直方图通道数目。
- 收集HOG特征
把提取的HOG特征输入到SVM分类器中,寻找一个最优超平面作为决策函数。
二、Dlib人脸图像特征提取
1.Dlib介绍
Dlib是一个现代化的C ++工具箱,其中包含用于在C ++中创建复杂软件以解决实际问题的机器学习算法和工具。它广泛应用于工业界和学术界,包括机器人,嵌入式设备,移动电话和大型高性能计算环境。Dlib的开源许可证 允许您在任何应用程序中免费使用它。
Dlib有很长的时间,包含很多模块,近几年作者主要关注在机器学习、深度学习、图像处理等模块的开发。
2.主要特点
- 文档丰富
与许多开源项目不同的是,Dlib为每个类和功能提供了完整和精确的文档。同时它还有调试模式,可以帮助你检查使用某个函数的先决条件。启用此功能后,它将捕获由于错误地调用函数或以不正确的方式使用对象而导致的绝大多数错误。
提供了许多示例程序(非常有用的示例!)
我认为文档是函数库最重要的部分。因此,如果您发现任何未记录的内容,不清楚或已过时的文档,请告诉原作者,作者会及时修复它。
- 高质量的广泛兼容的代码
好的单元测试覆盖率。代码的单元测试行与库代码行之比约为1到4。
该库在MS Windows,Linux和Mac OS X系统上定期进行测试。事实上,它可以在任何POSIX系统上运行,并且已经在Solaris,HPUX和BSD上使用。
没有其他软件包依赖。只需要通过开箱即用的操作系统提供的底层API。
在使用库之前,不需要安装或配置步骤。有关详细信息,请参阅 如何编译页面。
所有操作系统特定的代码都被隔离在尽可能小的操作系统抽象层中。库的其余部分要么在OS抽象层之上分层,要么是纯ISO标准C ++。
三、卷积神经网络人脸图像特征提取
1、卷积神经网络简介
卷积神经网络(Convolutional Neural Networks, CNN)是一类包含卷积计算且具有深度结构的前馈神经网络(Feedforward Neural Networks),是深度学习(deep learning)的代表算法之一。卷积神经网络具有表征学习(representation learning)能力,能够按其阶层结构对输入信息进行平移不变分类(shift-invariant classification),因此也被称为“平移不变人工神经网络(Shift-Invariant Artificial Neural Networks, SIANN)”
2、卷积神经网络结构
1) 输入层
卷积神经网络的输入层可以处理多维数据,常见地,一维卷积神经网络的输入层接收一维或二维数组,其中一维数组通常为时间或频谱采样;二维数组可能包含多个通道;二维卷积神经网络的输入层接收二维或三维数组;三维卷积神经网络的输入层接收四维数组.由于卷积神经网络在计算机视觉领域应用较广,因此许多研究在介绍其结构时预先假设了三维输入数据,即平面上的二维像素点和RGB通道。
与其它神经网络算法类似,由于使用梯度下降算法进行学习,卷积神经网络的输入特征需要进行标准化处理。具体地,在将学习数据输入卷积神经网络前,需在通道或时间/频率维对输入数据进行归一化,若输入数据为像素,也可将分布于 的原始像素值归一化至 [0,1] 区间。输入特征的标准化有利于提升卷积神经网络的学习效率和表现。
2) 隐含层
卷积神经网络的隐含层包含卷积层、池化层和全连接层3类常见构筑,在一些更为现代的算法中可能有Inception模块、残差块(residual block)等复杂构筑。在常见构筑中,卷积层和池化层为卷积神经网络特有。卷积层中的卷积核包含权重系数,而池化层不包含权重系数,因此在文献中,池化层可能不被认为是独立的层。以LeNet-5为例,3类常见构筑在隐含层中的顺序通常为:输入-卷积层-池化层-全连接层-输出。
卷积层
卷积层的功能是对输入数据进行特征提取,其内部包含多个卷积核,组成卷积核的每个元素都对应一个权重系数和一个偏差量(bias vector),类似于一个前馈神经网络的神经元(neuron)。卷积层内每个神经元都与前一层中位置接近的区域的多个神经元相连,区域的大小取决于卷积核的大小,在文献中被称为“感受野”,其含义可类比视觉皮层细胞的感受野。卷积核在工作时,会有规律地扫过输入特征,在感受野内对输入特征做矩阵元素乘法求和并叠加偏差量:

池化层
在卷积层进行特征提取后,输出的特征图会被传递至池化层进行特征选择和信息过滤。池化层包含预设定的池化函数,其功能是将特征图中单个点的结果替换为其相邻区域的特征图统计量。池化层选取池化区域与卷积核扫描特征图步骤相同,由池化大小、步长和填充控制。
输出层
卷积神经网络中输出层的上游通常是全连接层,因此其结构和工作原理与传统前馈神经网络中的输出层相同。对于图像分类问题,输出层使用逻辑函数或归一化指数函数(softmax function)输出分类标签。在物体识别(object detection)问题中,输出层可设计为输出物体的中心坐标、大小和分类。在图像语义分割中,输出层直接输出每个像素的分类结果。
