基于HAL库用STM32CubeMx生成FATFs+sd+flash
基于HAL库用STM32CubeMx生成FATFs+sd+flash
- 用stm32cubemx生成初始化代码
- 配置FATFS
- 接下来移植正点原子的SYSTEM+MALLOC+W25QXX
- 所用的头文件放到main.h里面去,方便使用
- 串口初始化代码里面先添加PRINTF的支持代码 别忘记了头文件的支持
- 这里是W25QXX的驱动代码。里面包括了spi的读写函数
- user_diskio.c添加flash的驱动代码
- 主函数里面的测试代码
- 串口助手打印的提示信息
- 移植过程中遇到的问题,
用stm32cubemx生成初始化代码
这里用的是正点原子的f429开发板
- 初始化串口
- 初始化SPI5
- 初始化SDIO
- 上面初始化都使用默认配置
- 初始化PF6(FLASH的片选引脚)-》上拉,初始化高电平
配置FATFS



不用管,继续生成
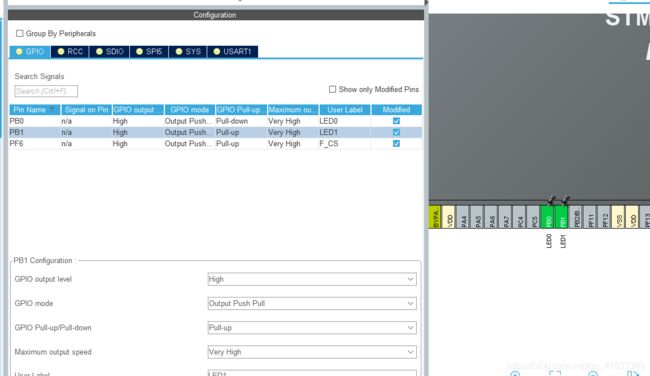
刚忘记配置两个LED用来指示单片机状态有没有死机,
好了,继续生成
接下来移植正点原子的SYSTEM+MALLOC+W25QXX

下面我把修改过的代码贴出来
所用的头文件放到main.h里面去,方便使用
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "w25qxx.h"
#include "delay.h"
#include "sys.h"
#include "malloc.h"
/* USER CODE END Includes */
串口初始化代码里面先添加PRINTF的支持代码 别忘记了头文件的支持
#include "stdio.h"
/* USER CODE BEGIN 1 */
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (uint8_t) ch;
return ch;
}
#endif
/* USER CODE END 1 */
这里是W25QXX的驱动代码。里面包括了spi的读写函数
#include "w25qxx.h"
#include "spi.h"
#include "delay.h"
#include "stm32f4xx_hal_gpio.h"
u16 W25QXX_TYPE=W25Q256; //默认是W25Q256
//4Kbytes为一个Sector
//16个扇区为1个Block
//W25Q256
//容量为32M字节,共有512个Block,8192个Sector
//SPI速度设置函数
//SPI速度=fAPB1/分频系数
//@ref SPI_BaudRate_Prescaler:SPI_BAUDRATEPRESCALER_2~SPI_BAUDRATEPRESCALER_2 256
//fAPB1时钟一般为45Mhz:
void SPI5_SetSpeed(u8 SPI_BaudRatePrescaler)
{
assert_param(IS_SPI_BAUDRATE_PRESCALER(SPI_BaudRatePrescaler));//判断有效性
__HAL_SPI_DISABLE(&hspi5); //关闭SPI
hspi5.Instance->CR1&=0XFFC7; //位3-5清零,用来设置波特率
hspi5.Instance->CR1|=SPI_BaudRatePrescaler;//设置SPI速度
__HAL_SPI_ENABLE(&hspi5); //使能SPI
}
//SPI5 读写一个字节
//TxData:要写入的字节
//返回值:读取到的字节
u8 SPI5_ReadWriteByte(u8 TxData)
{
u8 Rxdata;
HAL_SPI_TransmitReceive(&hspi5,&TxData,&Rxdata,1, 1000);
return Rxdata; //返回收到的数据
}
//初始化SPI FLASH的IO口
void W25QXX_Init(void)
{
u8 temp;
W25QXX_CS=1; //SPI FLASH不选中
SPI5_SetSpeed(SPI_BAUDRATEPRESCALER_8); //设置为45M时钟,高速模式
W25QXX_TYPE=W25QXX_ReadID(); //读取FLASH ID.
if(W25QXX_TYPE==W25Q256) //SPI FLASH为W25Q256
{
temp=W25QXX_ReadSR(3); //读取状态寄存器3,判断地址模式
if((temp&0X01)==0) //如果不是4字节地址模式,则进入4字节地址模式
{
W25QXX_CS=0; //选中
SPI5_ReadWriteByte(W25X_Enable4ByteAddr);//发送进入4字节地址模式指令
W25QXX_CS=1; //取消片选
}
}
}
//读取W25QXX的状态寄存器,W25QXX一共有3个状态寄存器
//状态寄存器1:
//BIT7 6 5 4 3 2 1 0
//SPR RV TB BP2 BP1 BP0 WEL BUSY
//SPR:默认0,状态寄存器保护位,配合WP使用
//TB,BP2,BP1,BP0:FLASH区域写保护设置
//WEL:写使能锁定
//BUSY:忙标记位(1,忙;0,空闲)
//默认:0x00
//状态寄存器2:
//BIT7 6 5 4 3 2 1 0
//SUS CMP LB3 LB2 LB1 (R) QE SRP1
//状态寄存器3:
//BIT7 6 5 4 3 2 1 0
//HOLD/RST DRV1 DRV0 (R) (R) WPS ADP ADS
//regno:状态寄存器号,范:1~3
//返回值:状态寄存器值
u8 W25QXX_ReadSR(u8 regno)
{
u8 byte=0,command=0;
switch(regno)
{
case 1:
command=W25X_ReadStatusReg1; //读状态寄存器1指令
break;
case 2:
command=W25X_ReadStatusReg2; //读状态寄存器2指令
break;
case 3:
command=W25X_ReadStatusReg3; //读状态寄存器3指令
break;
default:
command=W25X_ReadStatusReg1;
break;
}
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(command); //发送读取状态寄存器命令
byte=SPI5_ReadWriteByte(0Xff); //读取一个字节
W25QXX_CS=1; //取消片选
return byte;
}
//写W25QXX状态寄存器
void W25QXX_Write_SR(u8 regno,u8 sr)
{
u8 command=0;
switch(regno)
{
case 1:
command=W25X_WriteStatusReg1; //写状态寄存器1指令
break;
case 2:
command=W25X_WriteStatusReg2; //写状态寄存器2指令
break;
case 3:
command=W25X_WriteStatusReg3; //写状态寄存器3指令
break;
default:
command=W25X_WriteStatusReg1;
break;
}
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(command); //发送写取状态寄存器命令
SPI5_ReadWriteByte(sr); //写入一个字节
W25QXX_CS=1; //取消片选
}
//W25QXX写使能
//将WEL置位
void W25QXX_Write_Enable(void)
{
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(W25X_WriteEnable); //发送写使能
W25QXX_CS=1; //取消片选
}
//W25QXX写禁止
//将WEL清零
void W25QXX_Write_Disable(void)
{
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(W25X_WriteDisable); //发送写禁止指令
W25QXX_CS=1; //取消片选
}
//读取芯片ID
//返回值如下:
//0XEF13,表示芯片型号为W25Q80
//0XEF14,表示芯片型号为W25Q16
//0XEF15,表示芯片型号为W25Q32
//0XEF16,表示芯片型号为W25Q64
//0XEF17,表示芯片型号为W25Q128
//0XEF18,表示芯片型号为W25Q256
u16 W25QXX_ReadID(void)
{
u16 Temp = 0;
W25QXX_CS=0;
SPI5_ReadWriteByte(0x90);//发送读取ID命令
SPI5_ReadWriteByte(0x00);
SPI5_ReadWriteByte(0x00);
SPI5_ReadWriteByte(0x00);
Temp|=SPI5_ReadWriteByte(0xFF)<<8;
Temp|=SPI5_ReadWriteByte(0xFF);
W25QXX_CS=1;
return Temp;
}
//读取SPI FLASH
//在指定地址开始读取指定长度的数据
//pBuffer:数据存储区
//ReadAddr:开始读取的地址(24bit)
//NumByteToRead:要读取的字节数(最大65535)
void W25QXX_Read(u8* pBuffer,u32 ReadAddr,u16 NumByteToRead)
{
u16 i;
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(W25X_ReadData); //发送读取命令
if(W25QXX_TYPE==W25Q256) //如果是W25Q256的话地址为4字节的,要发送最高8位
{
SPI5_ReadWriteByte((u8)((ReadAddr)>>24));
}
SPI5_ReadWriteByte((u8)((ReadAddr)>>16)); //发送24bit地址
SPI5_ReadWriteByte((u8)((ReadAddr)>>8));
SPI5_ReadWriteByte((u8)ReadAddr);
for(i=0;i<NumByteToRead;i++)
{
pBuffer[i]=SPI5_ReadWriteByte(0XFF); //循环读数
}
W25QXX_CS=1;
}
//SPI在一页(0~65535)内写入少于256个字节的数据
//在指定地址开始写入最大256字节的数据
//pBuffer:数据存储区
//WriteAddr:开始写入的地址(24bit)
//NumByteToWrite:要写入的字节数(最大256),该数不应该超过该页的剩余字节数!!!
void W25QXX_Write_Page(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite)
{
u16 i;
W25QXX_Write_Enable(); //SET WEL
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(W25X_PageProgram); //发送写页命令
if(W25QXX_TYPE==W25Q256) //如果是W25Q256的话地址为4字节的,要发送最高8位
{
SPI5_ReadWriteByte((u8)((WriteAddr)>>24));
}
SPI5_ReadWriteByte((u8)((WriteAddr)>>16)); //发送24bit地址
SPI5_ReadWriteByte((u8)((WriteAddr)>>8));
SPI5_ReadWriteByte((u8)WriteAddr);
for(i=0;i<NumByteToWrite;i++)SPI5_ReadWriteByte(pBuffer[i]);//循环写数
W25QXX_CS=1; //取消片选
W25QXX_Wait_Busy(); //等待写入结束
}
//无检验写SPI FLASH
//必须确保所写的地址范围内的数据全部为0XFF,否则在非0XFF处写入的数据将失败!
//具有自动换页功能
//在指定地址开始写入指定长度的数据,但是要确保地址不越界!
//pBuffer:数据存储区
//WriteAddr:开始写入的地址(24bit)
//NumByteToWrite:要写入的字节数(最大65535)
//CHECK OK
void W25QXX_Write_NoCheck(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite)
{
u16 pageremain;
pageremain=256-WriteAddr%256; //单页剩余的字节数
if(NumByteToWrite<=pageremain)pageremain=NumByteToWrite;//不大于256个字节
while(1)
{
W25QXX_Write_Page(pBuffer,WriteAddr,pageremain);
if(NumByteToWrite==pageremain)break;//写入结束了
else //NumByteToWrite>pageremain
{
pBuffer+=pageremain;
WriteAddr+=pageremain;
NumByteToWrite-=pageremain; //减去已经写入了的字节数
if(NumByteToWrite>256)pageremain=256; //一次可以写入256个字节
else pageremain=NumByteToWrite; //不够256个字节了
}
};
}
//写SPI FLASH
//在指定地址开始写入指定长度的数据
//该函数带擦除操作!
//pBuffer:数据存储区
//WriteAddr:开始写入的地址(24bit)
//NumByteToWrite:要写入的字节数(最大65535)
u8 W25QXX_BUFFER[4096];
void W25QXX_Write(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite)
{
u32 secpos;
u16 secoff;
u16 secremain;
u16 i;
u8 * W25QXX_BUF;
W25QXX_BUF=W25QXX_BUFFER;
secpos=WriteAddr/4096;//扇区地址
secoff=WriteAddr%4096;//在扇区内的偏移
secremain=4096-secoff;//扇区剩余空间大小
//printf("ad:%X,nb:%X\r\n",WriteAddr,NumByteToWrite);//测试用
if(NumByteToWrite<=secremain)secremain=NumByteToWrite;//不大于4096个字节
while(1)
{
W25QXX_Read(W25QXX_BUF,secpos*4096,4096);//读出整个扇区的内容
for(i=0;i<secremain;i++)//校验数据
{
if(W25QXX_BUF[secoff+i]!=0XFF)break;//需要擦除
}
if(i<secremain)//需要擦除
{
W25QXX_Erase_Sector(secpos);//擦除这个扇区
for(i=0;i<secremain;i++) //复制
{
W25QXX_BUF[i+secoff]=pBuffer[i];
}
W25QXX_Write_NoCheck(W25QXX_BUF,secpos*4096,4096);//写入整个扇区
}else W25QXX_Write_NoCheck(pBuffer,WriteAddr,secremain);//写已经擦除了的,直接写入扇区剩余区间.
if(NumByteToWrite==secremain)break;//写入结束了
else//写入未结束
{
secpos++;//扇区地址增1
secoff=0;//偏移位置为0
pBuffer+=secremain; //指针偏移
WriteAddr+=secremain;//写地址偏移
NumByteToWrite-=secremain; //字节数递减
if(NumByteToWrite>4096)secremain=4096; //下一个扇区还是写不完
else secremain=NumByteToWrite; //下一个扇区可以写完了
}
};
}
//擦除整个芯片
//等待时间超长...
void W25QXX_Erase_Chip(void)
{
W25QXX_Write_Enable(); //SET WEL
W25QXX_Wait_Busy();
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(W25X_ChipErase); //发送片擦除命令
W25QXX_CS=1; //取消片选
W25QXX_Wait_Busy(); //等待芯片擦除结束
}
//擦除一个扇区
//Dst_Addr:扇区地址 根据实际容量设置
//擦除一个扇区的最少时间:150ms
void W25QXX_Erase_Sector(u32 Dst_Addr)
{
//监视falsh擦除情况,测试用
//printf("fe:%x\r\n",Dst_Addr);
Dst_Addr*=4096;
W25QXX_Write_Enable(); //SET WEL
W25QXX_Wait_Busy();
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(W25X_SectorErase); //发送扇区擦除指令
if(W25QXX_TYPE==W25Q256) //如果是W25Q256的话地址为4字节的,要发送最高8位
{
SPI5_ReadWriteByte((u8)((Dst_Addr)>>24));
}
SPI5_ReadWriteByte((u8)((Dst_Addr)>>16)); //发送24bit地址
SPI5_ReadWriteByte((u8)((Dst_Addr)>>8));
SPI5_ReadWriteByte((u8)Dst_Addr);
W25QXX_CS=1; //取消片选
W25QXX_Wait_Busy(); //等待擦除完成
}
//等待空闲
void W25QXX_Wait_Busy(void)
{
while((W25QXX_ReadSR(1)&0x01)==0x01); // 等待BUSY位清空
}
//进入掉电模式
void W25QXX_PowerDown(void)
{
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(W25X_PowerDown); //发送掉电命令
W25QXX_CS=1; //取消片选
delay_us(3); //等待TPD
}
//唤醒
void W25QXX_WAKEUP(void)
{
W25QXX_CS=0; //使能器件
SPI5_ReadWriteByte(W25X_ReleasePowerDown); // send W25X_PowerDown command 0xAB
W25QXX_CS=1; //取消片选
delay_us(3); //等待TRES1
}
上面的都是一些准备工作,其实到现在SD卡的文件系统已经移植完成了,因为生成的默认配置好了读写函数还有文件系统的配置,只需要挂载就能使用
下面我们来移植FLASH的文件系统的底层驱动
user_diskio.c添加flash的驱动代码
/**
******************************************************************************
* @file bsp_driver_sd.c for F4 (based on stm324x9i_eval_sd.c)
* @brief This file includes a generic uSD card driver.
******************************************************************************
* @attention
*
* © Copyright (c) 2019 STMicroelectronics.
* All rights reserved.
*
* This software component is licensed by ST under Ultimate Liberty license
* SLA0044, the "License"; You may not use this file except in compliance with
* the License. You may obtain a copy of the License at:
* www.st.com/SLA0044
*
******************************************************************************
*/
#ifdef OLD_API
/* kept to avoid issue when migrating old projects. */
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
#else
/* USER CODE BEGIN FirstSection */
/* can be used to modify / undefine following code or add new definitions */
/* USER CODE END FirstSection */
/* Includes ------------------------------------------------------------------*/
#include "bsp_driver_sd.h"
/* Extern variables ---------------------------------------------------------*/
extern SD_HandleTypeDef hsd;
/* USER CODE BEGIN BeforeInitSection */
/* can be used to modify / undefine following code or add code */
/* USER CODE END BeforeInitSection */
/**
* @brief Initializes the SD card device.
* @retval SD status
*/
uint8_t BSP_SD_Init(void)
{
uint8_t sd_state = MSD_OK;
/* Check if the SD card is plugged in the slot */
if (BSP_SD_IsDetected() != SD_PRESENT)
{
return MSD_ERROR;
}
/* HAL SD initialization */
sd_state = HAL_SD_Init(&hsd);
/* Configure SD Bus width (4 bits mode selected) */
if (sd_state == MSD_OK)
{
/* Enable wide operation */
if (HAL_SD_ConfigWideBusOperation(&hsd, SDIO_BUS_WIDE_4B) != HAL_OK)
{
sd_state = MSD_ERROR;
}
}
return sd_state;
}
/* USER CODE BEGIN AfterInitSection */
/* can be used to modify previous code / undefine following code / add code */
/* USER CODE END AfterInitSection */
/**
* @brief Configures Interrupt mode for SD detection pin.
* @retval Returns 0 in success otherwise 1.
*/
uint8_t BSP_SD_ITConfig(void)
{
/* TBI: add user code here depending on the hardware configuration used */
return (uint8_t)0;
}
/** @brief SD detect IT treatment
*/
void BSP_SD_DetectIT(void)
{
/* TBI: add user code here depending on the hardware configuration used */
}
/** @brief SD detect IT detection callback
*/
__weak void BSP_SD_DetectCallback(void)
{
/* NOTE: This function Should not be modified, when the callback is needed,
the BSP_SD_DetectCallback could be implemented in the user file
*/
}
/* USER CODE BEGIN BeforeReadBlocksSection */
/* can be used to modify previous code / undefine following code / add code */
/* USER CODE END BeforeReadBlocksSection */
/**
* @brief Reads block(s) from a specified address in an SD card, in polling mode.
* @param pData: Pointer to the buffer that will contain the data to transmit
* @param ReadAddr: Address from where data is to be read
* @param NumOfBlocks: Number of SD blocks to read
* @param Timeout: Timeout for read operation
* @retval SD status
*/
uint8_t BSP_SD_ReadBlocks(uint32_t *pData, uint32_t ReadAddr, uint32_t NumOfBlocks, uint32_t Timeout)
{
uint8_t sd_state = MSD_OK;
if (HAL_SD_ReadBlocks(&hsd, (uint8_t *)pData, ReadAddr, NumOfBlocks, Timeout) != HAL_OK)
{
sd_state = MSD_ERROR;
}
return sd_state;
}
/* USER CODE BEGIN BeforeWriteBlocksSection */
/* can be used to modify previous code / undefine following code / add code */
/* USER CODE END BeforeWriteBlocksSection */
/**
* @brief Writes block(s) to a specified address in an SD card, in polling mode.
* @param pData: Pointer to the buffer that will contain the data to transmit
* @param WriteAddr: Address from where data is to be written
* @param NumOfBlocks: Number of SD blocks to write
* @param Timeout: Timeout for write operation
* @retval SD status
*/
uint8_t BSP_SD_WriteBlocks(uint32_t *pData, uint32_t WriteAddr, uint32_t NumOfBlocks, uint32_t Timeout)
{
uint8_t sd_state = MSD_OK;
if (HAL_SD_WriteBlocks(&hsd, (uint8_t *)pData, WriteAddr, NumOfBlocks, Timeout) != HAL_OK)
{
sd_state = MSD_ERROR;
}
return sd_state;
}
/* USER CODE BEGIN BeforeReadDMABlocksSection */
/* can be used to modify previous code / undefine following code / add code */
/* USER CODE END BeforeReadDMABlocksSection */
/**
* @brief Reads block(s) from a specified address in an SD card, in DMA mode.
* @param pData: Pointer to the buffer that will contain the data to transmit
* @param ReadAddr: Address from where data is to be read
* @param NumOfBlocks: Number of SD blocks to read
* @retval SD status
*/
uint8_t BSP_SD_ReadBlocks_DMA(uint32_t *pData, uint32_t ReadAddr, uint32_t NumOfBlocks)
{
uint8_t sd_state = MSD_OK;
/* Read block(s) in DMA transfer mode */
if (HAL_SD_ReadBlocks_DMA(&hsd, (uint8_t *)pData, ReadAddr, NumOfBlocks) != HAL_OK)
{
sd_state = MSD_ERROR;
}
return sd_state;
}
/* USER CODE BEGIN BeforeWriteDMABlocksSection */
/* can be used to modify previous code / undefine following code / add code */
/* USER CODE END BeforeWriteDMABlocksSection */
/**
* @brief Writes block(s) to a specified address in an SD card, in DMA mode.
* @param pData: Pointer to the buffer that will contain the data to transmit
* @param WriteAddr: Address from where data is to be written
* @param NumOfBlocks: Number of SD blocks to write
* @retval SD status
*/
uint8_t BSP_SD_WriteBlocks_DMA(uint32_t *pData, uint32_t WriteAddr, uint32_t NumOfBlocks)
{
uint8_t sd_state = MSD_OK;
/* Write block(s) in DMA transfer mode */
if (HAL_SD_WriteBlocks_DMA(&hsd, (uint8_t *)pData, WriteAddr, NumOfBlocks) != HAL_OK)
{
sd_state = MSD_ERROR;
}
return sd_state;
}
/* USER CODE BEGIN BeforeEraseSection */
/* can be used to modify previous code / undefine following code / add code */
/* USER CODE END BeforeEraseSection */
/**
* @brief Erases the specified memory area of the given SD card.
* @param StartAddr: Start byte address
* @param EndAddr: End byte address
* @retval SD status
*/
uint8_t BSP_SD_Erase(uint32_t StartAddr, uint32_t EndAddr)
{
uint8_t sd_state = MSD_OK;
if (HAL_SD_Erase(&hsd, StartAddr, EndAddr) != HAL_OK)
{
sd_state = MSD_ERROR;
}
return sd_state;
}
/* USER CODE BEGIN BeforeHandlersSection */
/* can be used to modify previous code / undefine following code / add code */
/* USER CODE END BeforeHandlersSection */
/**
* @brief Handles SD card interrupt request.
*/
void BSP_SD_IRQHandler(void)
{
HAL_SD_IRQHandler(&hsd);
}
/**
* @brief Handles SD DMA Tx transfer interrupt request.
*/
void BSP_SD_DMA_Tx_IRQHandler(void)
{
HAL_DMA_IRQHandler(hsd.hdmatx);
}
/**
* @brief Handles SD DMA Rx transfer interrupt request.
*/
void BSP_SD_DMA_Rx_IRQHandler(void)
{
HAL_DMA_IRQHandler(hsd.hdmarx);
}
/**
* @brief Gets the current SD card data status.
* @param None
* @retval Data transfer state.
* This value can be one of the following values:
* @arg SD_TRANSFER_OK: No data transfer is acting
* @arg SD_TRANSFER_BUSY: Data transfer is acting
*/
uint8_t BSP_SD_GetCardState(void)
{
return ((HAL_SD_GetCardState(&hsd) == HAL_SD_CARD_TRANSFER ) ? SD_TRANSFER_OK : SD_TRANSFER_BUSY);
}
/**
* @brief Get SD information about specific SD card.
* @param CardInfo: Pointer to HAL_SD_CardInfoTypedef structure
* @retval None
*/
void BSP_SD_GetCardInfo(HAL_SD_CardInfoTypeDef *CardInfo)
{
/* Get SD card Information */
HAL_SD_GetCardInfo(&hsd, CardInfo);
}
/* USER CODE BEGIN BeforeCallBacksSection */
/* can be used to modify previous code / undefine following code / add code */
/* USER CODE END BeforeCallBacksSection */
/**
* @brief SD Abort callbacks
* @param hsd: SD handle
* @retval None
*/
void HAL_SD_AbortCallback(SD_HandleTypeDef *hsd)
{
BSP_SD_AbortCallback();
}
/**
* @brief Tx Transfer completed callback
* @param hsd: SD handle
* @retval None
*/
void HAL_SD_TxCpltCallback(SD_HandleTypeDef *hsd)
{
BSP_SD_WriteCpltCallback();
}
/**
* @brief Rx Transfer completed callback
* @param hsd: SD handle
* @retval None
*/
void HAL_SD_RxCpltCallback(SD_HandleTypeDef *hsd)
{
BSP_SD_ReadCpltCallback();
}
/* USER CODE BEGIN CallBacksSection_C */
/**
* @brief BSP SD Abort callback
* @retval None
*/
__weak void BSP_SD_AbortCallback(void)
{
}
/**
* @brief BSP Tx Transfer completed callback
* @retval None
*/
__weak void BSP_SD_WriteCpltCallback(void)
{
}
/**
* @brief BSP Rx Transfer completed callback
* @retval None
*/
__weak void BSP_SD_ReadCpltCallback(void)
{
}
/* USER CODE END CallBacksSection_C */
#endif
/**
* @brief Detects if SD card is correctly plugged in the memory slot or not.
* @param None
* @retval Returns if SD is detected or not
*/
uint8_t BSP_SD_IsDetected(void)
{
__IO uint8_t status = SD_PRESENT;
/* USER CODE BEGIN 1 */
/* user code can be inserted here */
/* USER CODE END 1 */
return status;
}
/* USER CODE BEGIN AdditionalCode */
/* user code can be inserted here */
/* USER CODE END AdditionalCode */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
主函数里面的测试代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* © Copyright (c) 2019 STMicroelectronics.
* All rights reserved.
*
* This software component is licensed by ST under Ultimate Liberty license
* SLA0044, the "License"; You may not use this file except in compliance with
* the License. You may obtain a copy of the License at:
* www.st.com/SLA0044
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "fatfs.h"
#include "sdio.h"
#include "spi.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
FATFS fs;
FATFS fs1;
FIL fp;
FIL fp1;
uint8_t word[50]={0};
UINT bw,br; //读写变量
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
uint8_t res=0;
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
delay_init(180);
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_SDIO_SD_Init();
MX_SPI5_Init();
MX_USART1_UART_Init();
MX_FATFS_Init();
/* USER CODE BEGIN 2 */
res=f_mount(&fs1,(TCHAR const*)"0:",1); //挂载sd卡
printf("f_mount(&fs,0:,1); res=%d\r\n",res);
printf("\r\n");
res=f_mount(&fs,(TCHAR const*)"1:",1); //挂载FLASH卡
printf("f_mount(&fs,1:,1); res=%d\r\n",res);
printf("\r\n");
res=f_open(&fp,"0:test.txt",FA_WRITE|FA_CREATE_ALWAYS);//打开sd卡的文件,如果找不到文件就创建
printf("0: f_open res=%d\r\n",res);
res=f_write(&fp,"FATFS SDCARD IS SUCCESS!!!YES",sizeof("FATFS SDCARD IS SUCCESS!!!YES"),&bw);//打开文件往里面写入数据,测试写入是否正常
printf("\r\n");
if(res)
{
printf("0: Write Error:%d\r\n",res);
}else printf("0: Writed data len:%d\r\n",bw);
printf("0: Write data over.\r\n");
res=f_close(&fp);//写完之后记得关闭文件,不然貌似会丢失
printf("0: f_close res=%d\r\n",res);
printf("\r\n");
res=f_open(&fp,"1:FLASHTEST.txt",FA_OPEN_ALWAYS|FA_WRITE);//打开FLASH卡的文件,如果找不到文件就创建
printf("1: f_open res=%d\r\n",res);
res=f_write(&fp,"OK FATFS SDCARD IS SUCCESS!!!",sizeof("OK FATFS SDCARD IS SUCCESS!!!"),&bw);;//打开文件往里面写入数据,测试写入是否正常
if(res)
{
printf("1: Write Error:%d\r\n",res);
}else printf("1: Writed data len:%d\r\n",bw);
printf("1: Write data over.\r\n");
res=f_close(&fp);//写完之后记得关闭文件,不然貌似会丢失
printf("1: f_close res=%d\r\n",res);
printf("\r\n");
res=f_open(&fp,"1:FLASHTEST.txt",FA_READ);//打开FLASH的文件,只读模式,如果上面测试创建失败就打不来
printf("1: f_open res=%d\r\n",res);
res=f_read(&fp,word,50,&br);
printf("1: read data len:%d\r\n",bw);
printf("1: f_read 1 res=%d\r\n",res);
res=f_close(&fp);
printf("1: f_close res=%d\r\n",res);
printf("1: read:%s\r\n",word);
printf("\r\n");
res=f_open(&fp1,"0:test.txt",FA_READ);//打开sd卡的文件,只读模式,如果上面测试创建失败就打不来
printf("0: f_open res=%d\r\n",res);
res=f_read(&fp1,word,50,&br);
printf("0: read data len:%d\r\n",br);
printf("0: f_read 0 res=%d\r\n",res);
res=f_close(&fp1);
printf("0: f_close res=%d\r\n",res);
printf("0: read:%s\r\n",word);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
HAL_GPIO_TogglePin(GPIOB, LED0_Pin|LED1_Pin);
HAL_Delay(500);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 180;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 8;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Activate the Over-Drive mode
*/
if (HAL_PWREx_EnableOverDrive() != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
串口助手打印的提示信息

移植过程中遇到的问题,
- SDIO开启dma传输不知道为什么会卡住一回,挂载,和打开文件都正常,但是写入就会卡住,注意不是卡死,然后过一会写入失败,忘记返回的错误代号是什么了,
- 后续添加,突然忘记了