android binder 机制 (ServiceManager)
Binder机制作为一种IPC通信机制,在android系统中扮演了非常重要的角色,因此我也花了一些时间来研究它,按照我的理解,下面我将从4个方面来讲一下Binder,如有不对的地方,还希望大家多多指教。下面的例子都将以MediaServer来讲。
一、ServiceManager
ServiceManager在Binder系统中相当与DNS,Server会先在这里注册,然后Client会在这里查询服务以获得与Service所在的Server进程建立通信的通路。
在与ServiceManager的通信中,书上是以addService为例来讲,我这里将以getService为例来讲。直接上代码。
/*static*/const sp&
IMediaDeathNotifier::getMediaPlayerService()
{
ALOGV("getMediaPlayerService");
Mutex::Autolock _l(sServiceLock);
if (sMediaPlayerService == 0) {
sp sm = defaultServiceManager();
sp binder;
do {
binder = sm->getService(String16("media.player"));
if (binder != 0) {
break;
}
ALOGW("Media player service not published, waiting...");
usleep(500000); // 0.5 s
} while (true);
if (sDeathNotifier == NULL) {
sDeathNotifier = new DeathNotifier();
}
binder->linkToDeath(sDeathNotifier);
sMediaPlayerService = interface_cast(binder);
}
ALOGE_IF(sMediaPlayerService == 0, "no media player service!?");
return sMediaPlayerService;
}
首先我们来看defaultServiceManager(),这是一个单例模式,实现如下:
sp defaultServiceManager() {
if (gDefaultServiceManager != NULL) return gDefaultServiceManager;
{
AutoMutex _l(gDefaultServiceManagerLock);
while (gDefaultServiceManager == NULL) {
gDefaultServiceManager = interface_cast(
ProcessState::self()->getContextObject(NULL));
if (gDefaultServiceManager == NULL)
sleep(1);
}
}
return gDefaultServiceManager;
} 其中,ProcessState::self()->getContextObject(NULL)会返回一个BpBinder(0),那么就有:
gDefaultServiceManager = interface_cast
根据interface_cast的定义,就变成了:
gDefaultServiceManager =BpServiceManager(BpBinder(0));接下来看下面这句话的实现:
binder = sm->getService(String16("media.player"));
由前面的分析,sm为BpServiceManager的实例,我们直接到IserviceManager.cpp里面找到BpServiceManager的实现,并找到getService方法,其核心实现调用了checkService方法,实现如下:virtual sp checkService( const String16& name) const
{
Parcel data, reply;
data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor());
data.writeString16(name);
remote()->transact(CHECK_SERVICE_TRANSACTION, data, &reply);
return reply.readStrongBinder();
}
这里,我们会有一个疑问:remote()返回什么。
先看BpServiceManager的定义:
classBpServiceManager : public BpInterface
template
classBpInterface : public INTERFACE, public BpRefBase
把模板替换一下,变成
classBpInterface : public IServiceManager, public BpRefBase
OK,在BpRefBase里面找到了remote()的定义:
inline IBinder* remote(){ return mRemote; }
mRemote什么时候赋值的呢?我们再来看BpServiceManager的构造函数:
BpServiceManager(const sp& impl)
: BpInterface(impl)
{
} inline BpInterface::BpInterface(const sp& remote)
: BpRefBase(remote)
{
} BpRefBase::BpRefBase(const sp& o)
: mRemote(o.get()), mRefs(NULL), mState(0)
{
extendObjectLifetime(OBJECT_LIFETIME_WEAK);
if (mRemote) {
mRemote->incStrong(this); // Removed on first IncStrong().
mRefs = mRemote->createWeak(this); // Held for our entire lifetime.
}
}
status_t BpBinder::transact(
uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
{
// Once a binder has died, it will never come back to life.
if (mAlive) {
status_t status = IPCThreadState::self()->transact(
mHandle, code, data, reply, flags);
if (status == DEAD_OBJECT) mAlive = 0;
return status;
}
return DEAD_OBJECT;
}
status_t IPCThreadState::transact(int32_t handle,
uint32_t code, const Parcel& data,
Parcel* reply, uint32_t flags)
{
status_t err = data.errorCheck();
flags |= TF_ACCEPT_FDS;
……
err = writeTransactionData(BC_TRANSACTION, flags, handle, code, data, NULL);
……
err = waitForResponse(reply);
……
return err;
}
status_t IPCThreadState::writeTransactionData(int32_t cmd, uint32_t binderFlags,
int32_t handle, uint32_t code, const Parcel& data, status_t* statusBuffer)
{
binder_transaction_data tr;
tr.target.handle = handle;
tr.code = code;
tr.flags = binderFlags;
tr.cookie = 0;
tr.sender_pid = 0;
tr.sender_euid = 0;
const status_t err = data.errorCheck();
if (err == NO_ERROR) {
tr.data_size = data.ipcDataSize();
tr.data.ptr.buffer = data.ipcData();
tr.offsets_size = data.ipcObjectsCount()*sizeof(size_t);
tr.data.ptr.offsets = data.ipcObjects();
} else if (statusBuffer) {
tr.flags |= TF_STATUS_CODE;
*statusBuffer = err;
tr.data_size = sizeof(status_t);
tr.data.ptr.buffer = statusBuffer;
tr.offsets_size = 0;
tr.data.ptr.offsets = NULL;
} else {
return (mLastError = err);
}
mOut.writeInt32(cmd);
mOut.write(&tr, sizeof(tr));
return NO_ERROR;
}status_t IPCThreadState::waitForResponse(Parcel *reply, status_t *acquireResult)
{
int32_t cmd;
int32_t err;
while (1) {
if ((err=talkWithDriver()) < NO_ERROR) break;
err = mIn.errorCheck();
if (err < NO_ERROR) break;
if (mIn.dataAvail() == 0) continue;
cmd = mIn.readInt32();
switch (cmd) {
…
case BR_REPLY:
{
binder_transaction_data tr;
err = mIn.read(&tr, sizeof(tr));
if (err != NO_ERROR) goto finish;
if (reply) {
if ((tr.flags & TF_STATUS_CODE) == 0) {
reply->ipcSetDataReference(
reinterpret_cast(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast(tr.data.ptr.offsets),
tr.offsets_size/sizeof(size_t),
freeBuffer, this);
} else {
err = *static_cast(tr.data.ptr.buffer);
freeBuffer(NULL,
reinterpret_cast(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast(tr.data.ptr.offsets),
tr.offsets_size/sizeof(size_t), this);
}
} else {
freeBuffer(NULL,
reinterpret_cast(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast(tr.data.ptr.offsets),
tr.offsets_size/sizeof(size_t), this);
continue;
}
}
goto finish;
……
default:
err = executeCommand(cmd);
if (err != NO_ERROR) goto finish;
break;
}
}
finish:
if (err != NO_ERROR) {
if (acquireResult) *acquireResult = err;
if (reply) reply->setError(err);
mLastError = err;
}
return err;
} status_t IPCThreadState::talkWithDriver(bool doReceive)
{
if (mProcess->mDriverFD <= 0) {
return -EBADF;
}
binder_write_read bwr;
// Is the read buffer empty?
const bool needRead = mIn.dataPosition() >= mIn.dataSize();
// We don't want to write anything if we are still reading
// from data left in the input buffer and the caller
// has requested to read the next data.
const size_t outAvail = (!doReceive || needRead) ? mOut.dataSize() : 0;
bwr.write_size = outAvail;
bwr.write_buffer = (long unsigned int)mOut.data();
// This is what we'll read.
if (doReceive && needRead) {
bwr.read_size = mIn.dataCapacity();
bwr.read_buffer = (long unsigned int)mIn.data();
} else {
bwr.read_size = 0;
bwr.read_buffer = 0;
}
// Return immediately if there is nothing to do.
if ((bwr.write_size == 0) && (bwr.read_size == 0)) return NO_ERROR;
bwr.write_consumed = 0;
bwr.read_consumed = 0;
status_t err;
do {
if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0)
err = NO_ERROR;
else
err = -errno;
if (mProcess->mDriverFD <= 0) {
err = -EBADF;
}
} while (err == -EINTR);
if (err >= NO_ERROR) {
if (bwr.write_consumed > 0) {
if (bwr.write_consumed < (ssize_t)mOut.dataSize())
mOut.remove(0, bwr.write_consumed);
else
mOut.setDataSize(0);
}
if (bwr.read_consumed > 0) {
mIn.setDataSize(bwr.read_consumed);
mIn.setDataPosition(0);
}
return NO_ERROR;
}
return err;
}在talkWithDriver中,IPCThreadState不断的写和读取Binder驱动,于是首先writeTransactionData中mOut中准备的数据被写到了Binder驱动,之后,便开始等待Binder中有新的数据出现,谁会往里面写数据呢?应该是目标进程才对,且让我们来看一下这部分是怎么实现的吧。
在Binder IPC通信过程中,进程间通信都要先通过向Binder驱动发送BC_XXX命令,然后Binder 驱动稍做处理后通过对应的BR_XXX将命令转给给目标进程。
如果有返回值,进程也是先将返回结果以BC_REPLY的形式先发给Binder驱动,然后通过驱动以BR_REPLY命令转发。
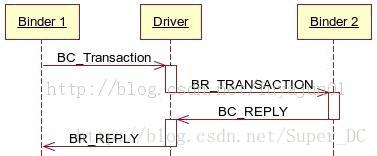
Binder1往Driver中写数据后,Binder驱动首先会判断当前命令接收方是Service Manager还是普通的Server端,判断依据是tr->target.handle.if(tr->target.handle == 0) 表示该命令是发送特殊结点,即Service Manager,而else 针对一般情况,我们需要判断Binder驱动中有没有对应的结点引用,正常情况下应该是能够找到handle对应的Binder结点引用的。通过结点引用,我们就可以定位到处理命令的Binder结点(实体结点)。
在上面的writeTransactionData中,tr->target.handle == 0,故Service Manager进程会收到BR_TRANSACTION命令,Service Manager在处理完命令后,会把结果通过BC_REPLY消息写回Binder驱动,使得上面的waitForResponse(存在与Client进程中)可以得到BR_REPLY的response,从而完成一次交互。
接下来,我们先跳到Service_Manager.c中,来看看Service Manager进程是怎么处理BR_TRANSACTION命令的。int main(int argc, char **argv)
{
struct binder_state *bs;
void *svcmgr = BINDER_SERVICE_MANAGER;
bs = binder_open(128*1024);
if (binder_become_context_manager(bs)) {
ALOGE("cannot become context manager (%s)\n", strerror(errno));
return -1;
}
svcmgr_handle = svcmgr;
binder_loop(bs, svcmgr_handler);
return 0;
}
void binder_loop(struct binder_state *bs, binder_handler func)
{
int res;
struct binder_write_read bwr;
unsigned readbuf[32];
bwr.write_size = 0;
bwr.write_consumed = 0;
bwr.write_buffer = 0;
readbuf[0] = BC_ENTER_LOOPER;
binder_write(bs, readbuf, sizeof(unsigned));
for (;;) {
bwr.read_size = sizeof(readbuf);
bwr.read_consumed = 0;
bwr.read_buffer = (unsigned) readbuf;
res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr);
if (res < 0) {
ALOGE("binder_loop: ioctl failed (%s)\n", strerror(errno));
break;
}
res = binder_parse(bs, 0, readbuf, bwr.read_consumed, func);
if (res == 0) {
ALOGE("binder_loop: unexpected reply?!\n");
break;
}
if (res < 0) {
ALOGE("binder_loop: io error %d %s\n", res, strerror(errno));
break;
}
}
}
在主循环中,Service Manager进程不断的操作Binder驱动,读取到数据后,便调用binder_parse来处理。
int binder_parse(struct binder_state *bs, struct binder_io *bio,
uint32_t *ptr, uint32_t size, binder_handler func)
{
int r = 1;
uint32_t *end = ptr + (size / 4);
while (ptr < end) {
uint32_t cmd = *ptr++;
#if TRACE
fprintf(stderr,"%s:\n", cmd_name(cmd));
#endif
switch(cmd) {
……
case BR_TRANSACTION: {
struct binder_txn *txn = (void *) ptr;
if ((end - ptr) * sizeof(uint32_t) < sizeof(struct binder_txn)) {
ALOGE("parse: txn too small!\n");
return -1;
}
binder_dump_txn(txn);
if (func) {
unsigned rdata[256/4];
struct binder_io msg;
struct binder_io reply;
int res;
bio_init(&reply, rdata, sizeof(rdata), 4);
bio_init_from_txn(&msg, txn);
res = func(bs, txn, &msg, &reply);
// 将结果写回Binder驱动
binder_send_reply(bs, &reply, txn->data, res);
}
ptr += sizeof(*txn) / sizeof(uint32_t);
break;
}
……
default:
ALOGE("parse: OOPS %d\n", cmd);
return -1;
}
}
return r;
}这里的func就是main里面的svcmgr,svcmgr函数用来处理各种命令,包括add_service和get_service等,处理完后,调用binder_send_reply将reply写回binder驱动,从而返回给其客户端进程。我们来看看svcmgr的实现。
int svcmgr_handler(struct binder_state *bs,
struct binder_txn *txn,
struct binder_io *msg,
struct binder_io *reply)
{
struct svcinfo *si;
uint16_t *s;
unsigned len;
void *ptr;
uint32_t strict_policy;
int allow_isolated;
// ALOGI("target=%p code=%d pid=%d uid=%d\n",
// txn->target, txn->code, txn->sender_pid, txn->sender_euid);
if (txn->target != svcmgr_handle)
return -1;
// Equivalent to Parcel::enforceInterface(), reading the RPC
// header with the strict mode policy mask and the interface name.
// Note that we ignore the strict_policy and don't propagate it
// further (since we do no outbound RPCs anyway).
strict_policy = bio_get_uint32(msg);
s = bio_get_string16(msg, &len);
if ((len != (sizeof(svcmgr_id) / 2)) ||
memcmp(svcmgr_id, s, sizeof(svcmgr_id))) {
fprintf(stderr,"invalid id %s\n", str8(s));
return -1;
}
switch(txn->code) {
case SVC_MGR_GET_SERVICE:
case SVC_MGR_CHECK_SERVICE:
s = bio_get_string16(msg, &len);
ptr = do_find_service(bs, s, len, txn->sender_euid);
if (!ptr)
break;
bio_put_ref(reply, ptr);
return 0;
case SVC_MGR_ADD_SERVICE:
s = bio_get_string16(msg, &len);
ptr = bio_get_ref(msg);
allow_isolated = bio_get_uint32(msg) ? 1 : 0;
if (do_add_service(bs, s, len, ptr, txn->sender_euid, allow_isolated))
return -1;
break;
case SVC_MGR_LIST_SERVICES: {
unsigned n = bio_get_uint32(msg);
si = svclist;
while ((n-- > 0) && si)
si = si->next;
if (si) {
bio_put_string16(reply, si->name);
return 0;
}
return -1;
}
default:
ALOGE("unknown code %d\n", txn->code);
return -1;
}
bio_put_uint32(reply, 0);
return 0;
}是的,我们看到了SVC_MGR_CHECK_SERVICE,SVC_MGR_ADD_SERVICE等命令都最终在这里得到了妥善的处理。
OK,到这里,获取Service的整个流程就完了。