Linux SD卡驱动开发(三) —— SD 卡驱动分析CORE篇
废话不多说,直接切进主题:
Linux在内核源码的drivers/mmc/core文件夹下为我们的提供了一系列SD卡的接口服务函数。可以查看Makefile如下
可见,core文件夹下有针对总线的服务bus.c,针对主控制器的服务host.c,针对SD卡的服务sd.c, sd_ops.c等等。
其中,最为核心的一个函数便是之前提到的位于core.c的mmc_rescan,概括来讲,主要完成两项任务,即
扫描SD总线,插入SD卡
扫描SD总线,拔出SD卡
一、 插入SD卡
前面HOST篇最后的中断篇中讲到,插入SD卡,主控制器产生中断,进入中断处理函数s3cmci_irq_cd,其中调用的函数 mmc_detect_change,它将最终调用queue_delayed_work执行工作队列里的mmc_rescan函数
下面来看看 mmc_rescan
void mmc_rescan(struct work_struct *work)
{
struct mmc_host *host =
container_of(work, struct mmc_host, detect.work);
int i;
if (host->rescan_disable)
return;
/* If there is a non-removable card registered, only scan once */
if ((host->caps & MMC_CAP_NONREMOVABLE) && host->rescan_entered)
return;
host->rescan_entered = 1;
mmc_bus_get(host);
/*
* if there is a _removable_ card registered, check whether it is
* still present
*/
if (host->bus_ops && host->bus_ops->detect && !host->bus_dead
&& !(host->caps & MMC_CAP_NONREMOVABLE))
host->bus_ops->detect(host);
host->detect_change = 0;
/*
* Let mmc_bus_put() free the bus/bus_ops if we've found that
* the card is no longer present.
*/
mmc_bus_put(host);
mmc_bus_get(host);
/* if there still is a card present, stop here */
if (host->bus_ops != NULL) {
mmc_bus_put(host);
goto out;
}
/*
* Only we can add a new handler, so it's safe to
* release the lock here.
*/
mmc_bus_put(host);
if (!(host->caps & MMC_CAP_NONREMOVABLE) && host->ops->get_cd &&
host->ops->get_cd(host) == 0) {
mmc_claim_host(host);
mmc_power_off(host);
mmc_release_host(host);
goto out;
}
mmc_claim_host(host);
for (i = 0; i < ARRAY_SIZE(freqs); i++) {
if (!mmc_rescan_try_freq(host, max(freqs[i], host->f_min)))
break;
if (freqs[i] <= host->f_min)
break;
}
mmc_release_host(host);
out:
if (host->caps & MMC_CAP_NEEDS_POLL)
mmc_schedule_delayed_work(&host->detect, HZ);
}
插入SD卡,mmc_rescan扫描SD总线上是否存在SD卡,具体的实现方法就是通过向SD卡上电,看是否能成功,以普通SD卡为例,为普通SD卡上电的函数mmc_send_app_op_cond(host, 0, &ocr);
如果上电成功,则返回0,即执行if()里的mmc_attach_sd()进行总线与SD卡的绑定。
如果上电失败,则返回非0值,跳过if(),尝试其他上电的方法。
那么,上电方法究竟有何不同呢?具体看看mmc_send_app_op_cond()的实现过程
int mmc_send_app_op_cond(struct mmc_host *host, u32 ocr, u32 *rocr)
{
struct mmc_command cmd;
cmd.opcode = SD_APP_OP_COND; /* #define SD_APP_OP_COND 41 */
mmc_wait_for_app_cmd(host, NULL, &cmd, MMC_CMD_RETRIES);
... ...
}int mmc_wait_for_app_cmd(struct mmc_host *host, struct mmc_card *card, struct mmc_command *cmd, int retries)
{
mmc_app_cmd(host, card); /* #define MMC_APP_CMD 55 */
mrq.cmd = cmd;
cmd->data = NULL;
mmc_wait_for_req(host, &mrq);
... ...
}这里的指令SD_APP_OP_COND只有SD2.0的协议支持,也就是说,只有普通SD卡支持,所以也只有普通SD卡能够成功上电。 

如果上电成功,就开始进行总线与SD卡的绑定,通过mmc_attach_sd(),绑定过程可分为四步,
注册SD总线上的操作函数 - struct mmc_bus_ops mmc_sd_ops
设置主控制器的时钟和总线方式 - 通过回调函数host->ops->set_ios();
启动SD卡 - 根据协议,完成SD卡启动的各个步骤
注册SD卡设备驱动
二、注册总线上的操作函数
int mmc_attach_sd(struct mmc_host *host, u32 ocr)
{
mmc_sd_attach_bus_ops(host);
... ...
}
static void mmc_sd_attach_bus_ops(struct mmc_host *host)
{
const struct mmc_bus_ops *bus_ops;
bus_ops = &mmc_sd_ops;
mmc_attach_bus(host, bus_ops);
}void mmc_attach_bus(struct mmc_host *host, const struct mmc_bus_ops *ops)
{
host->bus_ops = ops;
host->bus_refs = 1;
host->bus_dead = 0;
}static const struct mmc_bus_ops mmc_sd_ops = {
.remove = mmc_sd_remove, // 拔出SD卡的操作函数
.detect = mmc_sd_detect, // 探测SD卡的操作函数
.suspend = NULL,
.resume = NULL,
.power_restore = mmc_sd_power_restore, // 重新启动SD卡的操作函数
}; 这里的mmc_sd_detect和mmc_sd_remove就是拔出SD卡所需要用到的函数,下文将详细讨论。这里需要注意的是,插入SD卡的时候,并不执行mmc_sd_detect和mmc_sd_remove这两个函数,但是会注册它们,也就是说,这两个函数的功能已经实现,将来可以使用。
三、设置时钟和总线
int mmc_attach_sd(struct mmc_host *host, u32 ocr)
{
host->ocr = mmc_select_voltage(host, ocr);
... ...
}
u32 mmc_select_voltage(struct mmc_host *host, u32 ocr)
{
mmc_set_ios(host);
... ...
}
static inline void mmc_set_ios(struct mmc_host *host)
{
struct mmc_ios *ios = &host->ios;
host->ops->set_ios(host, ios); // 设置主控制器时钟和总线的回调函数,具体实现由主控制器驱动完成
} 从这里可以体会到回调函数的精髓:协议层里利用回调函数为所有满足该协议的设备提供统一的接口,而具体实现由底层不同的设备驱动各自完成。注意到,之所以要定义一些放之四海而皆准的公用的类,比如struct mmc_host,就是需要通过struct mmc_host *host指针作为形参传到协议层所提供的接口函数中,从而得以调用。
四、启动SD卡
int mmc_attach_sd(struct mmc_host *host, u32 ocr)
{
mmc_sd_init_card(host, host->ocr, NULL);
... ...
}mmc_sd_init_card主要完成以下任务,
SD卡的启动过程
得到寄存器CID, CSD, SCR, RCA的数据
其他操作比如切换到高速模式,初始化card
static int mmc_sd_init_card(struct mmc_host *host, u32 ocr, struct mmc_card *oldcard)
{
/* SD卡的启动过程 */
mmc_go_idle(host);
mmc_send_if_cond(host, ocr);
mmc_send_app_op_cond(host, ocr, NULL);
mmc_all_send_cid(host, cid);
mmc_send_relative_addr(host, &card->rca);
/* 得到寄存器CID, CSD, SCR的数据 */
mmc_send_csd(card, card->raw_csd);
mmc_decode_csd(card);
mmc_decode_cid(card);
mmc_app_send_scr(card, card->raw_scr);
mmc_decode_scr(card);
/* 其它操作 */
mmc_alloc_card(host, &sd_type);
mmc_select_card(card);
mmc_read_switch(card);
mmc_switch_hs(card);
... ...
}1) SD卡的启动过程
根据SD2.0协议,SD卡的状态可分为两种模式:卡识别模式(card-identification mode)和数据传输模式(data-transfer mode)。这里,我们关注启动SD卡的卡识别模式。

综合代码:
mmc_go_idle(host); CMD0
Idle State
mmc_send_if_cond(host, ocr); CMD8
mmc_send_app_op_cond(host, ocr, NULL); ACMD41
Ready State
mmc_all_send_cid(host, cid); CMD2
Identification State
mmc_send_relative_addr(host, &card->rca); CMD3
Stand-by State2) 寄存器CID, CSD, SCR, RCA
-> 发送指令并得到寄存器的值
当主控制器向SD卡发送cmd指令,比如mmc_send_cid(card, card->raw_cid),请求得到SD卡CID寄存器的值,当主控制器发送cmd完成后,芯片产生一个内部中断,处理结束cmd的中断函数,之后得到来自SD卡的response,即CID寄存器的值,存放于host->cmd->resp[i]中。关于内部中断处理,参看上文的中断一节里的 mmc_wait_for_cmd()
mmc_send_cid(card, card->raw_cid);这个函数发送了接收CSD寄存器的请求,并且得到了来自SD卡的CSD寄存器的值。
int mmc_send_cid(struct mmc_card *card, u32 *cid)
{
return mmc_send_cxd_native(card->host, card->rca << 16, cid, MMC_SEND_CID);
}
static int mmc_send_cxd_native(struct mmc_host *host, u32 arg, u32 *cxd, int opcode)
{
cmd.opcode = opcode;
cmd.arg = arg;
cmd.flags = MMC_RSP_R2 | MMC_CMD_AC;
mmc_wait_for_cmd(host, &cmd, MMC_CMD_RETRIES);
memcpy(cxd, cmd.resp, sizeof(u32) * 4); // 得到response赋给cxd,即card->raw_cid
... ...
}-> 解析寄存器的值
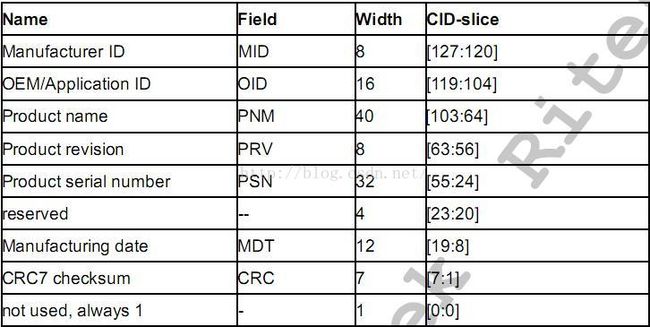
为什么要解析?先来看看寄存器CID在SD卡协议里的定义,它是一个128位的寄存器,存放了关于这块SD卡的基本信息,就像自己的身份证。通过mmc_send_cid()将这个寄存器的数值赋给了card->raw_cid (定义 u32 raw_cid[4];) ,为了方便得到具体某一个信息,协议层为我们解析了寄存器里的域,并赋给card->cid,比如厂商名称,就可以通过card->cid.manfid直接读取到。
static int mmc_decode_cid(struct mmc_card *card)
{
u32 *resp = card->raw_cid;
card->cid.manfid = UNSTUFF_BITS(resp, 120, 8);
card->cid.oemid = UNSTUFF_BITS(resp, 104, 16);
card->cid.prod_name[0] = UNSTUFF_BITS(resp, 96, 8);
card->cid.prod_name[1] = UNSTUFF_BITS(resp, 88, 8);
card->cid.prod_name[2] = UNSTUFF_BITS(resp, 80, 8);
card->cid.prod_name[3] = UNSTUFF_BITS(resp, 72, 8);
card->cid.prod_name[4] = UNSTUFF_BITS(resp, 64, 8);
card->cid.prod_name[5] = UNSTUFF_BITS(resp, 56, 8);
card->cid.serial = UNSTUFF_BITS(resp, 16, 32);
card->cid.month = UNSTUFF_BITS(resp, 12, 4);
card->cid.year = UNSTUFF_BITS(resp, 8, 4) + 1997;
return 0;
}五、 注册SD卡设备驱动
int mmc_attach_sd(struct mmc_host *host, u32 ocr)
{
/* mmc_alloc_card(host, &sd_type); 在mmc_sd_init_card()已完成 */
mmc_add_card(host->card);
... ...
}上文已经提到,设备驱动程序都会通过alloc_xxx()和add_xxx()两步来注册驱动,其实质是调用/drivers/base/core.c里的device_initialize()和device_add(),device_add()完成建立kobject,sys文件,发送uevent,等工作。
六、拔出SD卡
void mmc_rescan(struct work_struct *work)
{
struct mmc_host *host = container_of(work, struct mmc_host, detect.work);
mmc_bus_get(host);
/* if there is a card registered, check whether it is still present */
if ((host->bus_ops != NULL) && host->bus_ops->detect && !host->bus_dead)
host->bus_ops->detect(host);
mmc_bus_put(host);
... ...
}这里的mmc_bus_get/put(),为SD总线加上一个自旋锁,规定同时只能有一个线程在SD总线上操作。
1、 bus_ops->detect()
mmc_rescan()扫描SD总线,如果发现host->ops上赋了值,即之前已有SD卡注册过,就执行bus_ops->detect()操作去探测SD总线上是否还存在SD卡,如果不存在了,就执行bus_ops->remove()拔出SD卡。之前已经提到,这个bus_ops->detect()已在mmc_attach_sd()注册完成了。
static void mmc_sd_detect(struct mmc_host *host)
{
mmc_claim_host(host);
/*
* Just check if our card has been removed.
*/
err = mmc_send_status(host->card, NULL);
mmc_release_host(host);
if (err) {
mmc_sd_remove(host);
mmc_claim_host(host);
mmc_detach_bus(host);
mmc_release_host(host);
}
}这里的mmc_claim_host(host)通过set_current_state(TASK_RUNNING);将当前进程设置为正在运行进程。
mmc_send_status()发送得到SD卡状态的请求,如果未能得到状态数据,则执行mmc_sd_remove(host)拔出SD卡。
int mmc_send_status(struct mmc_card *card, u32 *status)
{
struct mmc_command cmd;
cmd.opcode = MMC_SEND_STATUS; /* #define MMC_SEND_STATUS 13 */
cmd.arg = card->rca << 16;
cmd.flags = MMC_RSP_SPI_R2 | MMC_RSP_R1 | MMC_CMD_AC;
err = mmc_wait_for_cmd(card->host, &cmd, MMC_CMD_RETRIES);
if (err)
return err; // 接收来自SD卡的response失败,即没有发现SD卡
if (status)
*status = cmd.resp[0];
return 0;
}2、bus_ops->remove()
拔出SD卡,其实就是注册SD卡驱动的反操作,实质就是执行device_del()和device_put()
static void mmc_sd_remove(struct mmc_host *host)
{
mmc_remove_card(host->card);
host->card = NULL;
}
void mmc_remove_card(struct mmc_card *card)
{
if (mmc_card_present(card))
device_del(&card->dev);
put_device(&card->dev);
}