siliconlabs EFR32如何使用串口调试
看完原理图后,首先解决的是串口打印调试,这是嵌入式编译第一步要做的事情,于是我自己建立了一个demo工程,在demo的基础上进行修改添加,
1.先来看代码的如何实现函数。

2.进入函数“halnit();”
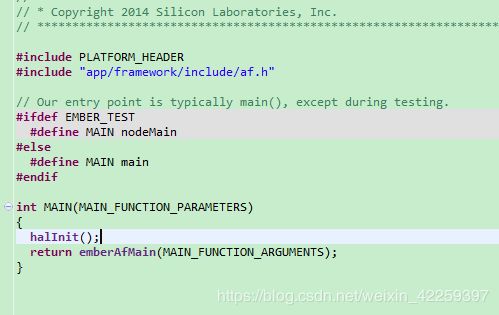
3.这个函数主要是做硬件初始化的函数,其他的地方不予要修改,只是做注释就好,我们自己添加一个硬件初始化函数"HardwareAdapterInit();"

4.进入到此函数中我们可以看到一些IO的初始化定义

上面可以看到关于UART1的端口定义,这个地方就不细说了。
5.下面的几个函数也是我们自己定义的,主要是硬件的驱动程序“ledinit”“halinternalinitbutton_key”.
6.现在问题来了,我们如何将打印信息从定义的端口输出,这个可以看芯片手册,通过寄存器的配置,让此端口映射到系统的UART1上即可。
这个需要我们做出的改动在"efr32"文件夹下的“uartdrv.c”中的
UARTDRV_InitUart(UARTDRV_Handle_t handle,
const UARTDRV_InitUart_t *initData)”函数中,
Ecode_t retVal;
USART_InitAsync_TypeDef usartInit = USART_INITASYNC_DEFAULT;
if (handle == NULL)
{
return ECODE_EMDRV_UARTDRV_ILLEGAL_HANDLE;
}
if (initData == NULL)
{
return ECODE_EMDRV_UARTDRV_PARAM_ERROR;
}
memset(handle, 0, sizeof(UARTDRV_HandleData_t));
#if (EMDRV_UARTDRV_HW_FLOW_CONTROL_ENABLE)
retVal = SetHandleIndex(handle);
if (retVal != ECODE_EMDRV_UARTDRV_OK)
{
return retVal;
}
handle->fcType = initData->fcType;
#else
// Force init data to uartdrvFlowControlNone if flow control is excluded by EMDRV_UARTDRV_HW_FLOW_CONTROL_ENABLE
handle->fcType = uartdrvFlowControlNone;
#endif
handle->peripheral.uart = initData->port;
handle->type = uartdrvUartTypeUart;
// Set clocks and DMA requests according to available peripherals
if (false)
{
#if defined(USART0)
}
else if (initData->port == USART0)
{
handle->uartClock = cmuClock_USART0;
handle->txDmaSignal = dmadrvPeripheralSignal_USART0_TXBL;
handle->rxDmaSignal = dmadrvPeripheralSignal_USART0_RXDATAV;
#endif
#if defined(USART1)
}
else if (initData->port == USART1)
{
handle->uartClock = cmuClock_USART1;
handle->txDmaSignal = dmadrvPeripheralSignal_USART1_TXBL;
handle->rxDmaSignal = dmadrvPeripheralSignal_USART1_RXDATAV;
#endif
#if defined(USART2)
}
else if (initData->port == USART2)
{
handle->uartClock = cmuClock_USART2;
handle->txDmaSignal = dmadrvPeripheralSignal_USART2_TXBL;
handle->rxDmaSignal = dmadrvPeripheralSignal_USART2_RXDATAV;
#endif
#if defined(UART0)
}
else if (initData->port == UART0)
{
handle->uartClock = cmuClock_UART0;
handle->txDmaSignal = dmadrvPeripheralSignal_UART0_TXBL;
handle->rxDmaSignal = dmadrvPeripheralSignal_UART0_RXDATAV;
#endif
#if defined(UART1)
}
else if (initData->port == UART1)
{
handle->uartClock = cmuClock_UART1;
handle->txDmaSignal = dmadrvPeripheralSignal_UART1_TXBL;
handle->rxDmaSignal = dmadrvPeripheralSignal_UART1_RXDATAV;
#endif
#if defined(UART2)
}
else if (initData->port == UART2)
{
handle->uartClock = cmuClock_UART2;
handle->txDmaSignal = dmadrvPeripheralSignal_UART2_TXBL;
handle->rxDmaSignal = dmadrvPeripheralSignal_UART2_RXDATAV;
#endif
}
else
{
return ECODE_EMDRV_UARTDRV_PARAM_ERROR;
}
InitializeQueues(handle, initData->rxQueue, initData->txQueue);
usartInit.baudrate = initData->baudRate;
usartInit.stopbits = initData->stopBits;
usartInit.parity = initData->parity;
usartInit.oversampling = initData->oversampling;
#if defined(USART_CTRL_MVDIS)
usartInit.mvdis = initData->mvdis;
#endif
// UARTDRV is fixed at 8 bit frames.
usartInit.databits = (USART_Databits_TypeDef)USART_FRAME_DATABITS_EIGHT;
// Enable clocks
CMU_ClockEnable(cmuClock_HFPER, true);
CMU_ClockEnable(cmuClock_GPIO, true);
CMU_ClockEnable(handle->uartClock, true);
// Init U(S)ART to default async config.
// RX/TX enable is done on demand
usartInit.enable = usartDisable;
USART_InitAsync(initData->port, &usartInit);
GPIO_PinModeSet(UART1_TX_GPIOPORT, UART1_TX_GPIOPIN, gpioModePushPull, 1);//161129-guo-change
#if defined(USART_ROUTEPEN_TXPEN)
initData->port->ROUTEPEN = USART_ROUTEPEN_TXPEN;
// | USART_ROUTEPEN_RXPEN;
// initData->port->ROUTELOC0 = (initData->port->ROUTELOC0
// & ~(_USART_ROUTELOC0_TXLOC_MASK
// | _USART_ROUTELOC0_RXLOC_MASK))
// | (initData->portLocationTx
// << _USART_ROUTELOC0_TXLOC_SHIFT)
// | (initData->portLocationRx
// << _USART_ROUTELOC0_RXLOC_SHIFT);
initData->port->ROUTELOC0 = (USART_ROUTELOC0_TXLOC << _USART_ROUTELOC0_TXLOC_SHIFT);
// | (11<< _USART_ROUTELOC0_RXLOC_SHIFT);
//#if defined(USART_ROUTEPEN_TXPEN)
// initData->port->ROUTEPEN = USART_ROUTEPEN_TXPEN
// | USART_ROUTEPEN_RXPEN;
// initData->port->ROUTELOC0 = (initData->port->ROUTELOC0
// & ~(_USART_ROUTELOC0_TXLOC_MASK
// | _USART_ROUTELOC0_RXLOC_MASK))
// | (initData->portLocationTx
// << _USART_ROUTELOC0_TXLOC_SHIFT)
// | (initData->portLocationRx
// << _USART_ROUTELOC0_RXLOC_SHIFT);
#else
initData->port->ROUTE = USART_ROUTE_TXPEN
| USART_ROUTE_RXPEN
| (initData->portLocation
<< _USART_ROUTE_LOCATION_SHIFT);
#endif
// if ((retVal = SetupGpioUart(handle, initData)) != ECODE_EMDRV_UARTDRV_OK)
// {
// return retVal;
// }
// if ((retVal = ConfigGpio(handle, true)) != ECODE_EMDRV_UARTDRV_OK)
// {
// return retVal;
// }
INT_Disable();
// Configure hardware flow control pins and interrupt vectors
#if (EMDRV_UARTDRV_HW_FLOW_CONTROL_ENABLE)
if (initData->fcType == uartdrvFlowControlHwUart)
{
#if defined(UART_HW_FLOW_CONTROL_SUPPORT)
// initData->port->ROUTEPEN |= USART_ROUTEPEN_CTSPEN | USART_ROUTEPEN_RTSPEN;
// initData->port->CTRLX |= USART_CTRLX_CTSEN;
// initData->port->ROUTELOC1 = (initData->portLocationCts << _USART_ROUTELOC1_CTSLOC_SHIFT)
// | (initData->portLocationRts << _USART_ROUTELOC1_RTSLOC_SHIFT);
#else
// Attempting to use USART hardware flow control on a device that does not
// support it.
return ECODE_EMDRV_UARTDRV_PARAM_ERROR;
#endif
}
// else if (initData->fcType == uartdrvFlowControlHw)
// {
// InitializeGpioFlowControl(handle);
// }
#endif
// Clear any false IRQ/DMA request
USART_IntClear(initData->port, ~0x0);
// Enable TX permanently as the TX circuit consumes very little energy.
// RX is enabled on demand as the RX circuit consumes some energy due to
// continuous (over)sampling.
if (initData->fcType == uartdrvFlowControlHwUart)
{
// RX must be enabled permanently when using USART hw flow control
USART_Enable(initData->port, usartEnable);
}
else
{
USART_Enable(initData->port, usartEnableTx);
}
// Discard false frames and/or IRQs
initData->port->CMD = USART_CMD_CLEARRX | USART_CMD_CLEARTX;
// Initialize DMA.
DMADRV_Init();
retVal = InitializeDma(handle);
INT_Enable();
if (retVal != ECODE_EMDRV_UARTDRV_OK)
{
return retVal;
}
return ECODE_EMDRV_UARTDRV_OK;
看了以上代码估计是蒙的,把之前的寄存器配置注释后,只做了一点修改如下图所示
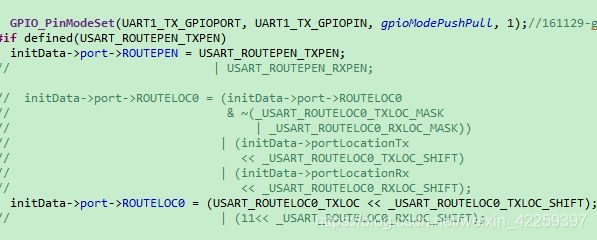
对寄存器的操作,映射到我需要的端口去。
然后在打印中用此函数“emberAfCorePrintln”即可进行打印。