STM32 编码器模式详解
0、编码器模式
stm32的定时器带的也有编码器模式。
所用的编码器是有ABZ三相,其中ab相是用来计数,z相输出零点信号。
AB相根据旋转的方向不同,输出的波形如下图所示:

从图上可以看出来,cw方向A相会超前B相90度左右,相反CCW方向,B相会超前A相90度左右。不过方向判断stm32自己是可以完成的。
一、编码器接口模式
选择编码器接口模式的方法是:如果计数器只在TI2的边沿计数,则置TIMx_SMCR寄存器中的SMS=001;如果只在TI1边沿计数,则置SMS=010;如果计数器同时在TI1和TI2边沿计数,则置SMS=011。
通过设置TIMx_CCER寄存器中的CC1P和CC2P位,可以选择TI1和TI2极性;如果需要,还可以对输入滤波器编程。
两个输入TI1和TI2被用来作为增量编码器的接口。参看表77,假定计数器已经启动(TIMx_CR1寄存器中的CEN=’1’),计数器由每次在TI1FP1或TI2FP2上的有效跳变驱动。TI1FP1和TI2FP2是TI1和TI2在通过输入滤波器和极性控制后的信号;如果没有滤波和变相,则TI1FP1=TI1,TI2FP2=TI2。根据两个输入信号的跳变顺序,产生了计数脉冲和方向信号。依据两个输入信号的跳变顺序,计数器向上或向下计数,同时硬件对TIMx_CR1寄存器的DIR位进行相应的设置。不管计数器是依靠TI1计数、依靠TI2计数或者同时依靠TI1和TI2计数。在任一输入端(TI1或者TI2)的跳变都会重新计算DIR位。
编码器接口模式基本上相当于使用了一个带有方向选择的外部时钟。这意味着计数器只在0到TIMx_ARR寄存器的自动装载值之间连续计数(根据方向,或是0到ARR计数,或是ARR到0计数)。所以在开始计数之前必须配置TIMx_ARR;同样,捕获器、比较器、预分频器、触发输出特性等仍工作如常。
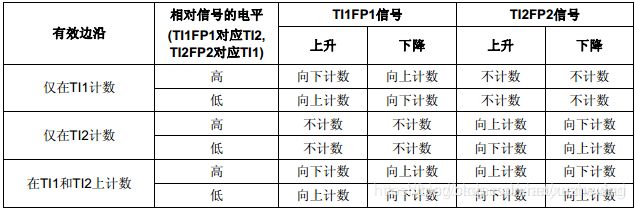
在这个模式下,计数器依照增量编码器的速度和方向被自动的修改,因此计数器的内容始终指示着编码器的位置。计数方向与相连的传感器旋转的方向对应。下表列出了所有可能的组合,假设TI1和TI2不同时变换。
表1 计数方向和编码器的关系
一个外部的增量编码器可以直接与MCU连接而不需要外部接口逻辑。但是,一般会使用比较器将编码器的差动输出转换到数字信号,这大大增加了抗噪声干扰能力。编码器输出的第三个信号表示机械零点,可以把它连接到一个外部中断输入并触发一个计数器复位。
下图是一个计数器操作的实例,显示了计数信号的产生和方向控制。它还显示了当选择了双边沿时,输入抖动是如何被抑制的;抖动可能会在传感器的位置靠近一个转换点时产生。在这个例子中,我们假定配置如下:
● CC1S=’01’ (TIMx_CCMR1寄存器, IC1FP1映射到TI1)
● CC2S=’01’ (TIMx_CCMR2寄存器, IC2FP2映射到TI2)
● CC1P=’0’ (TIMx_CCER寄存器, IC1FP1不反相, IC1FP1=TI1)
● CC2P=’0’ (TIMx_CCER寄存器, IC2FP2不反相, IC2FP2=TI2)
● SMS=’011’ (TIMx_SMCR寄存器,所有的输入均在上升沿和下降沿有效).
● CEN=’1’ (TIMx_CR1寄存器,计数器使能)
图1 编码器模式下的计数器操作实例

二、对下面计数器方向和编码器关系表格的理解

我们可以对应图1来看
仅在TI1计数时 相对信号的电平其实就是TI2的电平(不考虑反向的情况)这样再看这张表就会比较容易理解了
在TI2为高电平的时候TI1为上升沿时脉冲计数减1,TI1位下降沿时脉冲计数加1
在TI2为低电平的时候TI1为上升沿时脉冲计数加1,TI1位下降沿时脉冲计数减1
后面可以同理类推。
三、固件库中的编码器接口函数
上面部分的内容是对手册中编码器模式的摘录。从中我们可以看出编码器模式的配置方法。STM32固件库中提供了编码器接口的配置函数(下面摘录了函数介绍和参数说明部分)
/**
* @brief Configures the TIMx Encoder Interface.
* @param TIMx: where x can be 1, 2, 3, 4, 5 or 8 to select the TIM peripheral.
* @param TIM_EncoderMode: specifies the TIMx Encoder Mode.
* This parameter can be one of the following values:
* @arg TIM_EncoderMode_TI1: Counter counts on TI1FP1 edge depending on TI2FP2 level.
* @arg TIM_EncoderMode_TI2: Counter counts on TI2FP2 edge depending on TI1FP1 level.
* @arg TIM_EncoderMode_TI12: Counter counts on both TI1FP1 and TI2FP2 edges depending
* on the level of the other input.
* @param TIM_IC1Polarity: specifies the IC1 Polarity
* This parameter can be one of the following values:
* @arg TIM_ICPolarity_Falling: IC Falling edge.
* @arg TIM_ICPolarity_Rising: IC Rising edge.
* @param TIM_IC2Polarity: specifies the IC2 Polarity
* This parameter can be one of the following values:
* @arg TIM_ICPolarity_Falling: IC Falling edge.
* @arg TIM_ICPolarity_Rising: IC Rising edge.
* @retval None
*/
void TIM_EncoderInterfaceConfig(TIM_TypeDef* TIMx, uint16_t TIM_EncoderMode,uint16_t TIM_IC1Polarity, uint16_t TIM_IC2Polarity)
我们使用如下函数即可达到上面手册实例中通过寄存器配置的效果(假设使用的是TIM2定时器)
TIM_EncoderInterfaceConfig(TIM2,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising)
从上面的手册中我们也可知道使用编码器模式需要配置时基,也可以选择使用过滤器(需要配置输入捕获)因此我们可以推出编码器模式的编程流程
开始------------>
开启GPIO端口时钟和定时器时钟------------>
配置时基结构体------------>
配置编码器------------>
配置输入捕获结构体------------>
使能定时器------------>
结束
四、编码器可以使用的接口
一般的编码器有AB两相,需要接到定时器的两个通道上。对于STM32而言只有TIMx_CH1和TIMx_CH2支持编码器模式。这一点我们可以从定时器的时钟框图可以看出(因此编码器模式下定时器通道的选择上一定要注意)

五、使用stm32cubeMx配置的过程。
步骤
(1) 首先打开timer2的encoder模式:

(2) 下面才是重点,配置具体定时器的参数:
选择的encoderMode是 **TI1和TI2模式。这种模式下,AB两相的上升沿和下降沿都会计数,所以计数值是实际值的4倍,需要做分频。**也就是第一个参数,分频值设为3,实际上是3+1=4分频。
还有个地方需要解释一下,我刚开始的时候就是把这里的设置没搞清楚,看Polarity参数设置的是Rising Edge。这个参数的意思是在检测到上升沿的时候就触发encoder捕获AB相的值,而并不是这里设置的是上升沿就只检测AB相的上升沿,下降沿还是同样会计数的。
Input Filter滤波值是从1-15,看情况设定,是用来滤除一些杂波的。

(3) 生成代码
这样基本就配置好了,生成mdk工程。
然后就是添加应用代码了。
在初始化中添加打开定时器的encoder模式:
HAL_TIM_Encoder_Start(&htim2, TIM_CHANNEL_ALL);
然后定期调用下面这一句函数就可以获取到encoder编码器的计数值:
enc1 = (uint32_t)(__HAL_TIM_GET_COUNTER(&htim2));//获取定时器的值
六 常用函数
(1) 初始化的时候开启编码器计数
HAL_TIM_Encoder_Start(&htim3, TIM_CHANNEL_ALL);
HAL_TIM_Encoder_Start(&htim4, TIM_CHANNEL_ALL);
(2) 在循环中调用 __HAL_TIM_IS_TIM_COUNTING_DOWN 可以获得当前电机的转向 0为正、1为负
DirectionA = __HAL_TIM_IS_TIM_COUNTING_DOWN(&htim3);
DirectionB = __HAL_TIM_IS_TIM_COUNTING_DOWN(&htim4);
(3)在循环中调用 __HAL_TIM_GET_COUNTER 获取计数器的计数值,即编码器的脉冲数
CaptureNumberA=__HAL_TIM_GET_COUNTER(&htim3);
CaptureNumberB=__HAL_TIM_GET_COUNTER(&htim4);
(4)调用 __HAL_TIM_SET_COUNTER 设置计数器的计数值,即编码器的脉冲数
__HAL_TIM_SET_COUNTER(&htimx,number);
(5)调用__HAL_TIM_SET_AUTORELOAD 设置编码器的最大计数值ARR
__HAL_TIM_SET_AUTORELOAD(&htimx,number)
(6) 关闭编码器计数
HAL_TIM_Encoder_Stop(&htim3, TIM_CHANNEL_ALL);