深度强化学习cs294 Lecture6: Actor-Critic Algorithms
深度强化学习cs294 Lecture6: Actor-Critic Algorithms
- 1. Improving the policy gradient with a critic
- 2. The policy evaluation problem
- 3. Discount factors
- 4. The actor-critic algorithm
- State-dependent baselines
复习一下上节课的策略梯度算法。主要就是对目标函数的定义以及梯度的计算。还有一些减小方差的方法以及Importance Sampling的方法。

1. Improving the policy gradient with a critic
在公式里从当前开始得到的反馈值之和 Q ^ i , t π \widehat{Q}^{\pi}_{i,t} Q i,tπ有一个更好的估计方式:

这表示当前状态 s t s_{t} st采取了动作 a t a_{t} at之后后面会得到的所有反馈和的期望值。对应的有一个在当前状态 s t s_{t} st的期望值,就是对Q进行在 a t a_{t} at上求期望:

在policy gradient方法中使用一个常数b作为一个baseline来减小梯度的方差。这里的b就是对Q值的一个平均,那么就可以使用V来替代,而原本的 Q ^ i , t π \widehat{Q}^{\pi}_{i,t} Q i,tπ也可以用新的期望值 Q π ( s t , a t ) Q^{\pi}(s_{t},a_{t}) Qπ(st,at)替代。这样就得到了两个期望值的差值,我们把这个值叫做advantage函数。

使用了advantage函数的梯度求导,如果advantage函数估计得越准确,那么梯度的方差就会越小。而原来的使用一个序列的反馈值之和减去b的方式,方差更大。不过是一个无偏估计。
因此使用新的期望函数来计算梯度,但是需要计算三个不同的值 Q , V , A Q, V,A Q,V,A比较麻烦,可以看一下它们之间的关系。因为 Q π ( s t , a t ) Q^{\pi}(s_{t},a_{t}) Qπ(st,at)对应的是一个固定的状态动作对 ( s t , a t ) (s_{t},a_{t}) (st,at),因此有一步的反馈值r已经固定不变了,也就是 Q π ( s t , a t ) = r ( s t , a t ) + E s t + 1 ∼ p ( s t + 1 ∣ s t ) [ V π ( s t + 1 ) ] Q^{\pi}(s_{t},a_{t}) = r(s_{t},a_{t})+E_{s_{t+1}\sim p(s_{t+1}|s_{t})}[V^{\pi}(s_{t+1})] Qπ(st,at)=r(st,at)+Est+1∼p(st+1∣st)[Vπ(st+1)],如果采用采样近似期望的形式可以写为 Q π ( s t , a t ) ≈ r ( s t , a t ) + V π ( s t + 1 ) Q^{\pi}(s_{t},a_{t}) \approx r(s_{t},a_{t})+V^{\pi}(s_{t+1}) Qπ(st,at)≈r(st,at)+Vπ(st+1)。这样我们在计算梯度的过程中只需要计算一个期望函数 V π ( s t ) V^{\pi}(s_{t}) Vπ(st)即可,这个一般也使用神经网络来进行逼近。

2. The policy evaluation problem
从期望值V的定义可以看出,强化学习的目标函数其实就是这个值关于初始状态 s 1 s_{1} s1的期望值。也就是说计算 V π V^{\pi} Vπ就是对当前的策略进行一个评价,评价当前策略是好是坏。我们有两种MC方法能够估算出对应的V值,但是第二种对序列进行平均的方式不太好实现,因此一般使用第一个简单的形式:
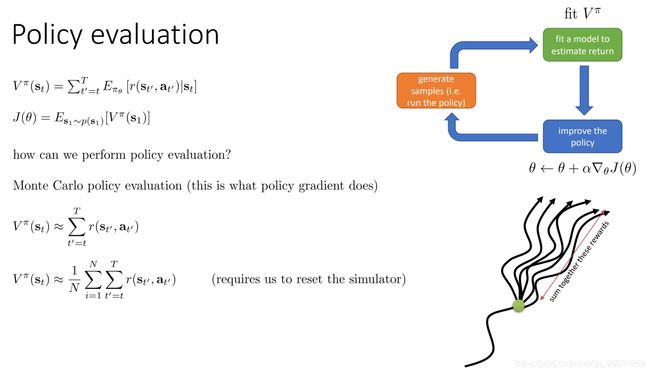
因此我们就有了目标label,下面用监督学习的方式来对这个V值做一个拟合即可,拟合的目标函数是均方误差,这样训练就能得到一个能够拟合出状态值函数的神经网络:

不过实际上我们可以做得更精确一些。因为这里直接使用了一个序列样本的反馈和作为目标值,实际上方差会很大。可以利用一个近似的方式来减小方差。 y i , t = ∑ t ′ = t T E π θ [ r ( s t ′ , a t ′ ) ∣ s i , t ] ≈ r ( s i , t , a i , t ) + V π ( s t ) ≈ r ( s i , a i ) + V ^ ϕ π ( s i , t + 1 ) y_{i,t} = \sum_{t'=t}^{T}E_{\pi_{\theta}}[r(s_{t'},a_{t'})|s_{i,t}]\approx r(s_{i,t},a_{i,t})+V^{\pi}(s_{t})\approx r(s_{i},a_{i})+\widehat{V}^{\pi}_{\phi}(s_{i,t+1}) yi,t=∑t′=tTEπθ[r(st′,at′)∣si,t]≈r(si,t,ai,t)+Vπ(st)≈r(si,ai)+V ϕπ(si,t+1)。这个方法叫做自举。其中使用了下一个状态的估计值来计算前一个时间状态的估计值。这样做能够减小方差,因为计算的结果不是一个采样而是一个期望。但是会引入一些误差,因为当前的估计函数并不是真实的V值。

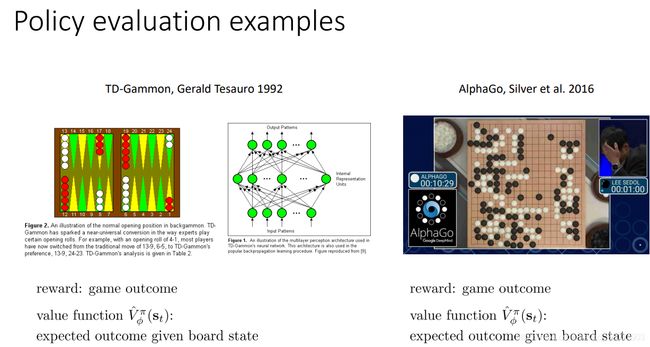
有很多成功的例子都使用了这个方法,比如TD-gammon和Alphago。
于是我们就得到了一个新的形式的actor-critic算法:

3. Discount factors
上面的actor-critic算法里第一步还需要采样一整个序列。想要变成每次只采样一个状态即可,还需要先引入Discount factors的设定。
因为值函数V的定义是当前状态以后所有反馈值的和,在有限步长的任务中没有问题,但是如果是一个无限步长的任务,那么这个值有可能是无限大的。因此需要引入一个折损系数 γ \gamma γ,它的意义在于让离当前状态比较近的反馈值更重要,而离得比较远的可能不那么看重。
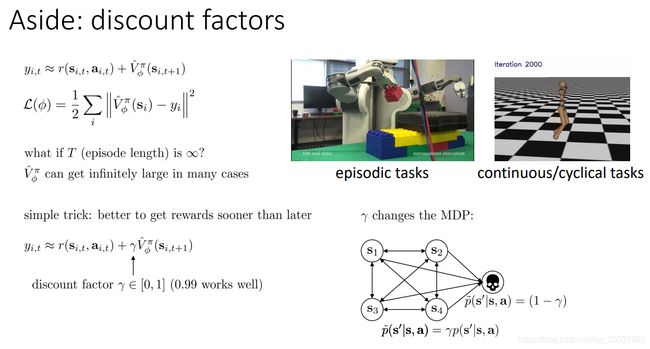
这个系数虽然看似加在了反馈值上面,但实际上会对MDP的概率做一个改变。它相当于增加了一个额外的状态,每个状态转移都有 1 − γ 1-\gamma 1−γ的概率转移到这个死亡状态里。这个状态代表着任务失败或意外结束。
不过对于目标函数梯度的计算,加入discount factors的写法可以有两种。

第一种写法是直接从当前时间t开始加系数 γ \gamma γ,而第二种写法是从最开始 t = 1 t=1 t=1的时候就开始加系数。然后再通过利用因果率去掉 t ′ t' t′之前的反馈值。这样最终两种写法的系数还是有一些差别。
一般情况下两种方式有两种不同的解释和应用场景。第二种写法是对应着带有死亡状态的MDP形式。系数从第一步就开始加入,这就意味着这种写法更在意从头开始的动作,对于往后的动作给的关注更少。
而第一种写法是从时刻t开始加系数,也就是说它会一直在意从当前时刻开始的动作。这种形式一般用在一直连续运动的场景里。

第一种写法实际上不是一个正确的加了discount factor后的写法。它相当于是对平均反馈值加了一个系数来减小方差,它去除掉那些距离太远的反馈值的影响,因为可能太远了已经没有了意义。当然这样会是平均反馈的有偏估计。具体的数学部分在ppt下方的论文里。
第一种写法实际中更常用,也就是作为减小方差的方式。而第二种写法能够向我们解释在经典的场景里discount factor的意义。
加入了discount factors之后的actor-critic算法可以采用对每个状态进行采用的形式,这样就有了online形式的算法。

4. The actor-critic algorithm
在实际实现actor-critic算法的时候可以选择两种结构。一种是让策略函数与值函数分别训练。这样做可能比较简单而且稳定,但是这样就不能共享一些提取特征的网络层。第二种是两种函数共享一部分网络,这样就能够共享前面提取特征的部分。

实际上如果实现一个online形式的算法,最好的做法并不是对每一个状态都做一次更新,而是得到足够多的样本里作为一个batch来更新。因为这样能够减小更新的方差。而实现这样的方式也有两种,一种是同步的一种是异步的。

异步强化学习算法在本课后面会有详细的讨论。
比较一下和原来的policy gradient相比,actor-critic算法在更新的时候有更小的方差,但是它使用的值函数是有偏的。而policy gradient算法虽然是无偏的,但是带来的方差太大了。我们可以将它们两个算法做一个组合,利用它们两种方法的优点:
能够得到一个没有偏差而且方差较小的版本。
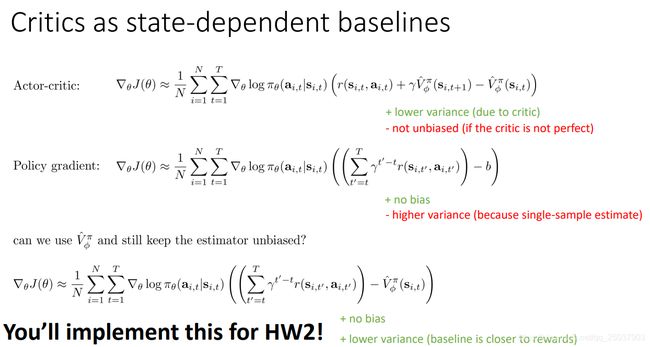
State-dependent baselines
之前用到作为baseline的函数一直都是状态值函数V,实际上状态动作值函数Q也能够作为baseline。只不过这样做实际上得到的不是一个advantage函数,在期望上得到一个期望为0的函数。因为减小了这部分的值,就能够减小对应部分的方差。

但是期望为0直接带入得不到目标函数的梯度值,因此计算梯度值的时候还需要把 Q ϕ π ( s t , a t ) Q_{\phi}^{\pi}(s_{t},a_{t}) Qϕπ(st,at)以期望的形式加回来,这样目标函数梯度值的期望与原来保持一致。为什么要多做这一步,因为 Q ϕ π ( s t , a t ) Q_{\phi}^{\pi}(s_{t},a_{t}) Qϕπ(st,at)的期望在一些情况下有闭式解,因此比较好得到。比如Q是动作a的二次函数而策略是高斯分布的时候(我懂了吗?我没有懂)。
目前我们有两种得到advantage函数的形式,一种是完全自举的,有更低的方差,但是有比较高的偏差。第二种是蒙特卡洛采样减去估计值的,这样做没有偏差,但是方差比较大。因此我们需要想办法把这两种结合起来:
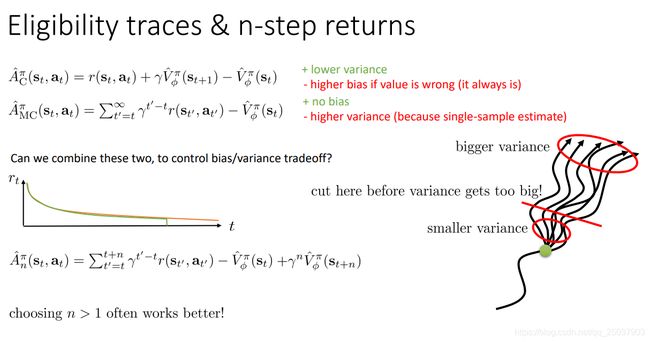
实际上第一种写法是一个一步return的写法,如果把一步变为n步,而n趋近于无穷的时候就等同于MC采样,而n>1的其它情况能够利用这两种写法的优势,得到方差较小偏差也较小的结果。具体可以看sutton的书或者n步自举。
还有个在n步自举之上更加泛化的形式,那就是资格迹。同样可以看sutton的书或者资格迹。这里讲得比较简略,大致就是将不同的n步结果的advantage函数再加权求和一次:
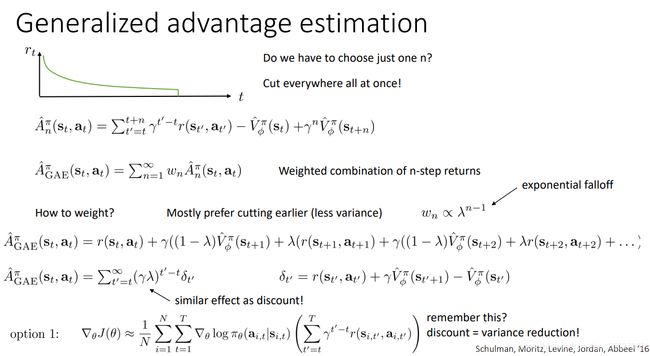
同样的最后是为了减小方差。
回顾一下本节课的内容:

后面依然是两个例子和一些推荐文章。其中A3C算法似乎是比较火爆。
路漫漫其修远兮,吾将迟早听不懂。