通过读取原始星历文件数据推算GPS卫星位置坐标

一、GPS 广播卫星星历文件如下(其中还有北斗、伽利略等各种卫星,共78995条数据,下面是部分数据格式):

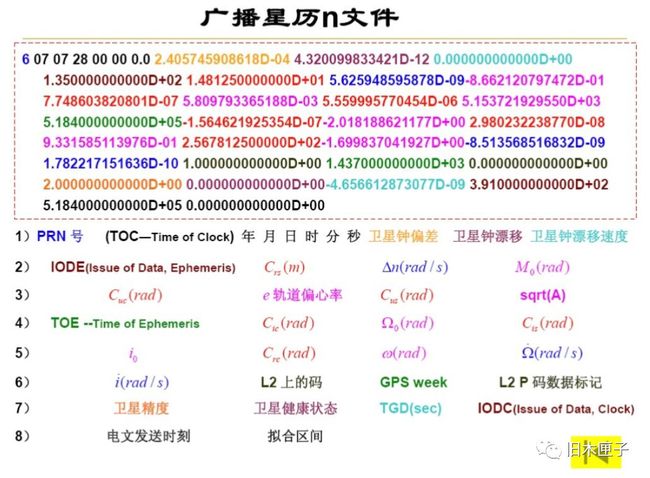
二、读取数据
网上看到的代码都是用编程语言本身的一些字符串处理函数来写的,感觉不仅很复杂,并且可读性很差吧!
之前写爬虫程序的时候接触过正则表达式,后来发现C++也支持用正则表达式,那么用正则表达式匹配的话,很方便就能得到自己需要的数据了。正则匹配及读取数据代码如下:
vector prn;
vector> vt; // 二维动态数组
vector vi; // 一维动态数组
this->inFile.open(path1, ios::in); // 打开文件
this->oFile.open(path2, ios::out | ios::trunc);
if (this->inFile && this->oFile) // 若文件打开成功则继续下面操作
{
string s; // 存放读取的每一行字符串
smatch m; // 存放正则匹配到的元素
regex r("G\\d\\d.*|-?\\d.\\d{12}e[-+]\\d\\d"); // 正则匹配每个卫星单元
regex r1("\\d{4}|\\d\\d|-?\\d\\.\\d{12}e[+-]\\d\\d"); // 正则匹配非首行
int i = 0;
while (getline(this->inFile, s)) // 打开文件
{
if (++i == 3220) break;
if (regex_search(s, m, r)) // 匹配条件为 True 进入
if (regex_search(s, m, regex("G\\d\\d"))) // 首行则进入
{
prn.push_back(s.substr(0, 3)); // 将卫星 prn 推入
vt.push_back(vi); // 将之前的遍历作为一个推入 vt
vi.clear(); // 清空vi,为下一次遍历做准备
for (sregex_iterator it(s.begin() + 3, s.end(), r1), end_it; it != end_it; ++it) // sregex_iterator 正则迭代作用
vi.push_back(stold(it->str())); // 将匹配的每一个参数转为浮点型再推入vi
}
else
for (sregex_iterator it(s.begin(), s.end(), r1),
end_it; it != end_it; ++it) vi.push_back(stold(it->str())); // 将匹配的每一个参数转为浮点型再推入vi
}
vt.push_back(vi); // 将最后一次遍历的值推入 vt
// 写入文档首行条目
this->oFile << "n" << "," << "tk" << "," << "mk" << "," << "ek" << "," << "vk" << "," << "pa" << "," << "cu" << "," <<
"cr" << "," << "ci" << "," << "uk" << "," << "rk" << "," << "ik" << "," << "xk" << "," << "yk" << "," << "dk" <<
"," << "Xk" << "," << "Yk" << "," << "Zk" << endl;
}
else cout << "打开文件失败!请关闭 Excel 后重试!" << endl; // 若文件打开失败则提示
三、计算坐标
我将其封装在类 Satellites 中的 calData() 方法中, 代码如下:
// 计算数据函数
void Satellites::calData()
{
this->n = sqrt(U) / pow(this->sqrtA, 3) + this->a_poor; // 计算平均角速度 n
this->tk = this->getgpst('s') - this->toe; // 计算归化时间 tk
this->mk = this->m0 + (this->n * this->tk); // 观测时间 mk
this->ek = this->mk; // 计算偏近角
long double temp = 0;
while (fabs(this->ek - temp) > 0.10e-12)
{
temp = this->ek;
this->ek = this->mk + (this->e * sin(temp));
}
this->vk = atan((sqrt(1 - pow(this->e, 2)) * sin(this->ek) / (cos(this->ek) - this->e))); // 计算真近角 vk
this->pa = this->vk + this->w; // 计算升交距角
this->cu = (this->Cuc * cos(2 * this->pa)) + (this->Cus * sin(2 * this->pa)); // 计算摄动改正项
this->cr = (this->Crc * cos(2 * this->pa)) + (this->Crs * sin(2 * this->pa));
this->ci = (this->Cic * cos(2 * this->pa)) + (this->Cis * sin(2 * this->pa));
this->uk = this->pa + this->cu; // 计算经过摄动改正的参数
this->rk = pow(this->sqrtA, 2) * (1 - this->e * cos(this->ek)) + this->cr;
this->ik = this->i0 + this->ci + (this->i * this->tk);
this->xk = this->rk * cos(this->uk); // 平面直角坐标系中的坐标
this->yk = this->rk * sin(this->uk);
this->dk = this->Ra0 + ((this->Ra - E) * this->tk) - (E * this->toe); // 升交点纬度计算
this->Xk = this->xk * cos(this->dk) - (this->yk * cos(this->ik) * sin(this->dk)); // 计算在地心固定坐标系中的直角坐标
this->Yk = this->xk * sin(this->dk) + (this->yk * cos(this->ik) * sin(this->dk));
this->Zk = this->yk * sin(this->ik);
}四、全部代码(包括将计算结果写入 Excel)
1、main.cpp(主函数)
#pragma once
#include
#include "Satellites.h"
using namespace std;
int main()
{
string path1 = "C:\\Users\\amir\\Desktop\\GPS\\example\\brdm01001.19p"; // GPS 卫星星历在 PC 上的路径
string path2 = "E:\\results.csv"; // GPS 位置计算结果存储的路径
Satellites s(path1, path2); // 实例化类,并传入地址
s.calData(); // 调用计算卫星位置的函数
system("pause");
return 0;
}
2、Satellites.h(自定义头文件)
#pragma once
#include
#include
#include
#include
using namespace std;
class Satellites
{
public:
Satellites(string path, string path2);
~Satellites();
void calData();
static int ydcount(int year); // 获取每一年的天数
static int ydcount(int year, int month); // 获取每一个月的天数
long double getgpst(char c); // 计算 GPS 周或 周内秒
void wdata(); // 输出计算结果
private:
long double n, tk, mk, ek, vk, pa, cu, cr, ci, uk, rk, ik, xk, yk, dk, Xk, Yk, Zk, X, Y, Z; // 平均角速度 n
ifstream inFile;
ofstream oFile;
string prn; // 卫星号
int year, month, day, hour, min, second; // 年,月,日,时,分,秒
long double af0; // 卫星钟差
long double af1; // 卫星钟速
long double af2; // 卫星钟速变率
long double IODE; // 数据龄期
long double Crs; // 轨道半径正弦调和项改正的振幅
long double a_poor; // 平均角速度之差
long double m0; // 平近点角
long double Cuc; // 纬度幅角的余弦调和项改正的振幅
long double e; // 轨道偏心率
long double Cus; // 纬度幅角的余弦调和项改正的振幅
long double sqrtA; // 轨道长半径的平方根
long double toe; // 轨道参数的参考时间
long double Cic; // 轨道倾角的余弦调和项改正的振幅
long double Ra0; // 升交点赤经
long double Cis; // 轨道倾角的正弦调和项改正的振幅
long double i0; // 轨道倾角
long double Crc; // 轨道半径的余弦调和项改正的振幅
long double w; // 近地点角距
long double Ra; // 升焦点赤经变化率
long double i; // 倾角变化率
long double L2; // L2上的码
long double g_week; // GPS 周数
long double L2P; // L2上的P码
long double acc; // 卫星精度
long double state; // 健康状态
long double Tgd; // 电离层时延迟差
long double IDOC; // 星钟的数据龄期
long double s_time; // 电文发送时刻
long double f_val; // 拟合区间
};
3、Satellites.cpp(类的实现)
#pragma once
#include
#include
#include
#include "Satellites.h"
using namespace std;
#define U 3.986005e+14 // WGS-84 中地球引力常数
#define E 7.29211567e-5 // 地球自转速率
Satellites::Satellites(string path1, string path2)
{
vector prn;
vector> vt; // 二维动态数组
vector vi; // 一维动态数组
this->inFile.open(path1, ios::in); // 打开文件
this->oFile.open(path2, ios::out | ios::trunc);
if (this->inFile && this->oFile) // 若文件打开成功则继续下面操作
{
string s; // 存放读取的每一行字符串
smatch m; // 存放正则匹配到的元素
regex r("G\\d\\d.*|-?\\d.\\d{12}e[-+]\\d\\d"); // 正则匹配每个卫星单元
regex r1("\\d{4}|\\d\\d|-?\\d\\.\\d{12}e[+-]\\d\\d"); // 正则匹配非首行
int i = 0;
while (getline(this->inFile, s)) // 打开文件
{
if (++i == 3220) break;
if (regex_search(s, m, r)) // 匹配条件为 True 进入
if (regex_search(s, m, regex("G\\d\\d"))) // 首行则进入
{
prn.push_back(s.substr(0, 3)); // 将卫星 prn 推入
vt.push_back(vi); // 将之前的遍历作为一个推入 vt
vi.clear(); // 清空vi,为下一次遍历做准备
for (sregex_iterator it(s.begin() + 3, s.end(), r1), end_it; it != end_it; ++it) // sregex_iterator 正则迭代作用
vi.push_back(stold(it->str())); // 将匹配的每一个参数转为浮点型再推入vi
}
else
for (sregex_iterator it(s.begin(), s.end(), r1),
end_it; it != end_it; ++it) vi.push_back(stold(it->str())); // 将匹配的每一个参数转为浮点型再推入vi
}
vt.push_back(vi); // 将最后一次遍历的值推入 vt
// 写入文档首行条目
this->oFile << "n" << "," << "tk" << "," << "mk" << "," << "ek" << "," << "vk" << "," << "pa" << "," << "cu" << "," <<
"cr" << "," << "ci" << "," << "uk" << "," << "rk" << "," << "ik" << "," << "xk" << "," << "yk" << "," << "dk" <<
"," << "Xk" << "," << "Yk" << "," << "Zk" << endl;
}
else cout << "打开文件失败!请关闭 Excel 后重试!" << endl; // 若文件打开失败则提示
//cout << prn.size() << " " << vt.size() << " " << vt[0][0] << endl;
for (int i = 1; i < vt.size(); i++) // 将数据存储在变量
{
cout << i << endl;
this->prn = prn[i-1];
this->year = vt[i][0];
this->month = vt[i][1];
this->day = vt[i][2];
this->hour = vt[i][3];
this->min = vt[i][4];
this->second = vt[i][5];
this->af0 = vt[i][6];
this->af1 = vt[i][7];
this->af2 = vt[i][8];
this->IODE = vt[i][9];
this->Crs = vt[i][10];
this->a_poor = vt[i][11];
this->m0 = vt[i][12];
this->Cuc = vt[i][13];
this->e = vt[i][14];
this->Cus = vt[i][15];
this->sqrtA = vt[i][16];
this->toe = vt[i][17];
this->Cic = vt[i][18];
this->Ra0 = vt[i][19];
this->Cis = vt[i][20];
this->i0 = vt[i][21];
this->Crc = vt[i][22];
this->w = vt[i][23];
this->Ra = vt[i][24];
this->i = vt[i][25];
this->L2 = vt[i][26];
this->g_week = vt[i][27];
this->L2P = vt[i][28];
this->acc = vt[i][29];
this->state = vt[i][30];
this->Tgd = vt[i][31];
this->IDOC = vt[i][32];
//this->s_time = vt[i][33];
//this->f_val = vt[i][34];
this->calData(); // 计算数据
this->wdata(); // 存储数据
}
}
// 析构函数,关闭文件
Satellites::~Satellites()
{
this->inFile.close(); // 关闭文件
this->oFile.close(); // 关闭文件
}
// 计算数据函数
void Satellites::calData()
{
this->n = sqrt(U) / pow(this->sqrtA, 3) + this->a_poor; // 计算平均角速度 n
this->tk = this->getgpst('s') - this->toe; // 计算归化时间 tk
this->mk = this->m0 + (this->n * this->tk); // 观测时间 mk
this->ek = this->mk; // 计算偏近角
long double temp = 0;
while (fabs(this->ek - temp) > 0.10e-12)
{
temp = this->ek;
this->ek = this->mk + (this->e * sin(temp));
}
this->vk = atan((sqrt(1 - pow(this->e, 2)) * sin(this->ek) / (cos(this->ek) - this->e))); // 计算真近角 vk
this->pa = this->vk + this->w; // 计算升交距角
this->cu = (this->Cuc * cos(2 * this->pa)) + (this->Cus * sin(2 * this->pa)); // 计算摄动改正项
this->cr = (this->Crc * cos(2 * this->pa)) + (this->Crs * sin(2 * this->pa));
this->ci = (this->Cic * cos(2 * this->pa)) + (this->Cis * sin(2 * this->pa));
this->uk = this->pa + this->cu; // 计算经过摄动改正的参数
this->rk = pow(this->sqrtA, 2) * (1 - this->e * cos(this->ek)) + this->cr;
this->ik = this->i0 + this->ci + (this->i * this->tk);
this->xk = this->rk * cos(this->uk); // 平面直角坐标系中的坐标
this->yk = this->rk * sin(this->uk);
this->dk = this->Ra0 + ((this->Ra - E) * this->tk) - (E * this->toe); // 升交点纬度计算
this->Xk = this->xk * cos(this->dk) - (this->yk * cos(this->ik) * sin(this->dk)); // 计算在地心固定坐标系中的直角坐标
this->Yk = this->xk * sin(this->dk) + (this->yk * cos(this->ik) * sin(this->dk));
this->Zk = this->yk * sin(this->ik);
}
// 计算每一年的天数
int Satellites::ydcount(int year)
{
int count = 0;
if (year == 1980) count = 360; // 若是 1980 年的话,按照算法 360 天
else if ((year % 4 == 0) && (year % 100 != 0) || (year % 400 == 0)) count = 366; // 若是闰年,则 1 年有 366 天
else count = 365; // 若平闰年,则 1 年有 365 天
return count;
}
// 计算一年中每个月的天数
int Satellites::ydcount(int year, int month)
{
int count = 0; // 存储每个月的天数
if (year == 1980 && month == 1) count = 25; // 根据算法,1980 年 1 月算作 25 天
else if (month == 4 || month == 6 || month == 9 || month == 11) count = 30; // 四六九冬 30 整
else if (month == 1 || month == 3 || month == 5 || month == 7 || month == 8 || month == 10 || month == 12) count = 31;
else
{
if ((year % 4 == 0) && (year % 100 != 0) || (year % 400 == 0)) count = 29; // 若是闰年,则 2 月有 29 天
else count = 28;
}
return count;
}
// c = 'w' 则返回 gps 周, c = 's' 则返回 gpa 周内秒,默认返回周内秒
long double Satellites::getgpst(char c = 's')
{
if (c != 'w' && c != 's') return -1; // 若传递的参数不正确,则返回-1
int days = this->day;
for (int i = 1980; i < this->year; i++) days += ydcount(i); // 计算年天数
for (int i = 1; i < this->month; i++) days += ydcount(this->year, i); // 计算月天数
return c == 'w' ? days / 7 : (days % 7) * 86400 + (this->hour * 3600) + (this->min * 60) + this->second;
}
// 将数据写入文件
void Satellites::wdata()
{
cout << this->prn << endl;
this->oFile << this->prn << this->n << "," << this->tk << "," << this->mk << "," << this->ek << ","
<< this->vk << "," << this->pa << "," << this->cu << "," << this->cr <<
"," << this->ci << "," << this->uk << "," << this->rk << "," << this->ik
<< "," << this->xk << "," << this->yk << "," << this->dk << "," << this->Xk <<
"," << this->Yk << "," << this->Zk << endl;
}