从A*算法看AI寻路问题
一.寻路问题
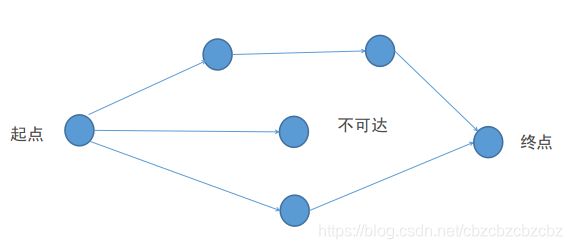
寻路问题一直以来都是十分经典和有趣的问题,在我们生活中以及人工智能方面有着及其重要的研究价值。简而言之,寻路问题就是在给定起点和终点的情况下,找出一条可到达的最短路径,一路上可能有墙,坑,湖等不可经过的地段。
表现在数据结构里面就是一张图,如下所示。
我们可以对模型进行一下简化,便于我们分析问题。我们将寻路问题简化成一张方格表,类似于棋盘一样:
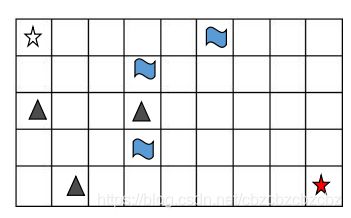
图中,空五角星为起点,红五角星为终点,图上有河流,山峰等无法穿越的地区,需要从空五角星走到红五角星。
二.寻路问题的几种解法
寻路问题很古老也很经典,目前比较常见的算法有广度优先,Dijkstra算法,A*算法以及“万能的”遗传算法等等。
1.深度优先搜索也是遍历图的一种方法,但是对于求最短路径作用不大。广度优先算法比较适合用来求最短路径,因为它本质上是从起点遍历所有相邻点,继而往外扩散直到找到终点。
广度优先的基本步骤如下:
a.将根节点加入队列
b.从队列取出节点,判断是否是目标节点,是则输出,否则遍历所有相邻节点,并加入队列
c.如果队列为空,则输出无法找到目标节点
可以看出来,BFS算法存在盲目搜索的感觉,简单的遍历所有节点而不考虑可能性大的节点。
2.遗传算法也可用于寻路问题,之所以说遗传算法是“万能”的,因为只要是演化计算求最优解的案例都可以采用遗传算法。基本步骤如下:
a.对基因进行编码,每个基因代表一条路径
b.对基因进行交叉,变异,表现为交换路径某处的格子,或者直接替换某处的格子
c.选择距离终点最近的路线,即优秀的基因,产生下一代种群
d.循环往复,直到找出包含终点的路径
可以看出,遗传算法的通用性决定了它肯定不是最佳解法。种群的数量,筛选的机制等都会影响最终结果,并且会很容易陷入局部最优,从而无法得到全局最优解。
3.Dijkstra算法是十分优秀的求单源最短路径的算法,相比于BFS算法,增加了权值的概念,这样我们就能找到到达终点的最短路径,而不仅仅是某条路径而已。基本步骤如下:
a.每个顶点都有一个代价值,每条边都有一个权值,起点首先加入到路径中
b.遍历当前顶点的相邻子节点,代价值等于父节点的代价值加上边的权值,若新代价值小于原代价值,则更新加入到路径中
c.查找代价值最小的顶点,加入到路径中
d.重复b,c两步,直到访问完所有的节点
可以看出,Dijkstra算法只考虑了当前顶点到起始点的代价值,而忽略了当前点到终点的距离
三. A*算法
A*算法汲取了Dijkstra算法的优点,同时加入了顶点到终点的代价值,使得它在寻路问题中处于至关重要的地位。寻路问题一直是人工智能中的有趣问题,如何选择最短路径以及最短时间将是首要解决的问题。
A*算法的基本步骤如下所示:
1.从起点开始,遍历九宫格的其他8格的代价值,其中代价值F等于当前点到起点的距离G加上当前点到终点的距离H,所有顶点加入到开放列表中,父节点都是起点
2.将起点加入关闭列表,选取F值最小的顶点,将其作为中心点继续遍历九宫格,对于关闭列表的点暂时不考虑,新的顶点加入到开放列表中,同时已在开放列表中的点需要更新代价值F,若新的F值较小,则更新当前点的父节点
3.重复以上步骤,直到九宫格包含终点则输出最短路径,若最终开放列表为空,表示没有路径
A*算法的关键概念有以下几处:
1.开放列表表示所有待检查的点集合,这些点都有可能成为最短路径中的某个点。关闭列表表示已经检查过的中心点集合。
2.代价值F=G+H,其中G指的是当前点到周围点的直接距离,如直角为1,斜边为1.4,H指的是周围点到终点的距离。H值我们采用的是“曼哈顿”距离,等于周围点到终点的水平距离加上垂直距离,忽略障碍物的存在。可以看出,H值的计算有着启发式搜索的思想,这是Dijkstra算法所没有的。
3.欧氏距离与曼哈顿距离,欧氏距离指的是两个点之间的直线距离
![]()
曼哈顿距离指的是两个点之间的水平加垂直距离,下图中绿色表示欧氏距离,红,黄,蓝表示等价的曼哈顿距离(此图来源于网络)
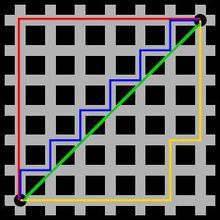
欧氏距离往往伴随着浮点运算,浮点运算相比于整数运算较费时,并且会产生一定的误差,而曼哈顿距离只是简单的加减法,运算起来快速且不会产生误差。
A*算法图解
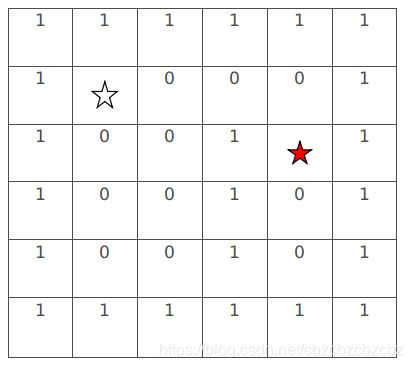
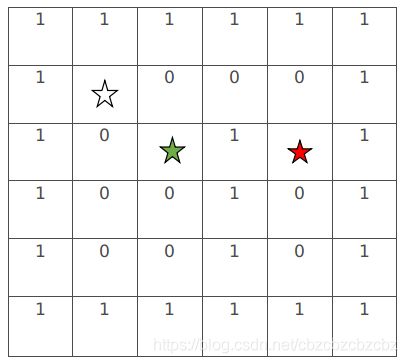
step1:初始状态,空星是起点,红星是终点,0表示可达,1表示不可达
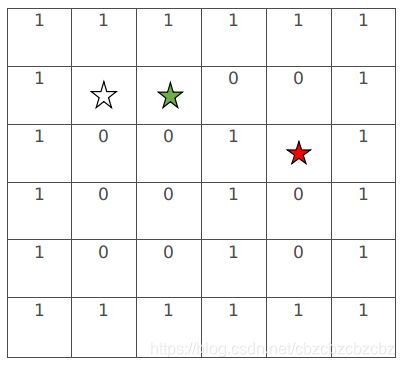
step2:空星点作为当前中心点,检查周围九宫格的点,计算每个点的G值和H值,并加入开放列表,父节点都指向起点。显然,图中绿星是F值最小的,F=1.4+2=3.4,则绿星作为下一轮的中心点,此时空星已加入关闭列表
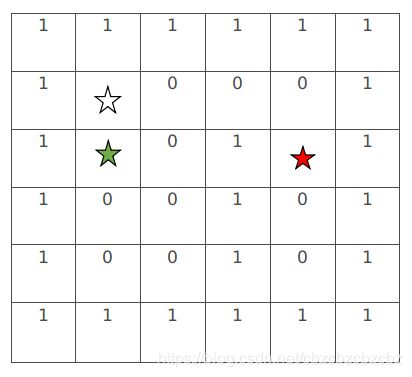
step3:上一步中的绿星同样检查周围九宫格,对于已经在开放列表的点,我们会比较此时的F值和旧的F值,显然,此时还是老的F值最小,F=4,即图中新的绿星位置,绿星再次加入关闭列表
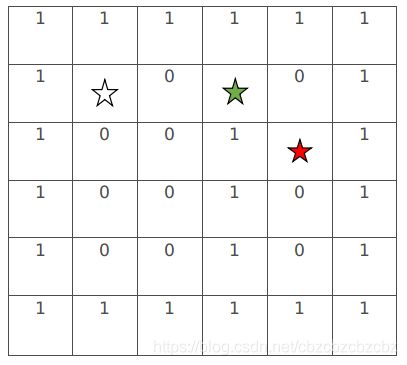
step4:同理,继续检查九宫格,当前中心点变成了下面的绿星,检查原理同上
step5:再次从开放列表里面选择F值最低的,此时是下面的绿星
step6:上一步中的绿星,检查九宫格之后,发现终点就在它的附近,于是直接跑到了终点,程序结束

A*算法的基本思路
1.定义节点信息
class Node {
int x; //点的x坐标
int y; //点的y坐标
Node parent; //点的父节点
int F; //点的代价值F
int G; //点距离父节点的距离
int H; //点距离终点的距离
}2.主要的遍历流程
while (没达到终点)
{
centerNode=开放列表中最小F值的点
if (tNode==终点)//tNode表示当前中心点centerNode周围的某个点
{
跳出循环,终点指向centerNode;
}
while(遍历centerNode的周围点)
{
if (tNode==墙,坑,山)//不可达的点
{
忽略这个点
}
else if(tNode在关闭列表中)
{
也无需关注
}
else
{
tNode.G=centerNode.G+1;//根据tNode相对于centerNode的方向赋予G值,直边取1,斜边取1.4
tNode.H=getManhattanDistance(tNode,终点);//计算曼哈顿距离
tNode.F=tNode.G+tNode.H;
if (开放列表包含tNode)
{
检查tNode和已有node的F值,小则更新F值和父节点
}
else
{
开放列表加入tNode,并指向父节点centerNode
}
}
}
if (开放列表为空或者到达终点)
{
跳出while循环
}
开放列表移除中心点centerNode,并加入关闭列表
}A*算法的运行
上述的伪代码已经比较清楚的介绍了算法思路,我自己写了个demo,算法+UI。个人一直以来都比较喜欢这样做,光写算法不得劲,算法枯燥耗脑,不写个UI来实现一下不舒服。正所谓没有算法的界面是空壳,没有界面的算法不直观,哈哈(其实是我自己说的)。我把运行结果做成了GIF,图中生成了两张地图,一大一小,最外围边上都是墙,中间随机有山峰和湖面,小旗子是终点,大家可以很清楚的看到小人的跑动路径。
欢迎大家留言,大家一起讨论,一起进步!