MATLAB函数的filter2 conv2 imfilter2函数 与opencv中的cvFilter2D函数的异同及图像的频率滤波
最近在做科研的过程中用到图像的滤波,由于图像数据量比较大,就考虑空域转化频域相乘来提高效率,测试的的时候出现MATLAB 与OPENCV的结果不相同,以前也知道MATLAB和OPENCV的滤波机理不相同,但是具体的过程也是不是太清楚,于是用程序测试filter2,conv2,imfilter2,cvFilter2D函数的异同。
conv2用来计算源图像A和滤波模板H的卷积,计算过程为将滤波模板旋转180度后,进行掩膜计算,计算的过程中要对边界补0计算。
a=[1 2;3 4];
b=[-1 1;-2 2];
c=conv2(a,b,'full')输出为
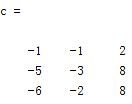
conv2的计算可以使用频域的乘积计算,但是要对矩阵的边界补零
a1=[1 2 0;3 4 0;0 0 0];
b1=[-1 1 0;-2 2 0;0 0 0];
a1f=fft2(a1);
b1f=fft2(b1);
abf1=a1f.*b1f;
c1=ifft2(abf1)输出为
filter2计算过程为对滤波模板H进行180度旋转后,再调用conv2函数。由于conv2函数又对模板旋转180度,等于直接对滤波模板H直接进行掩膜计算。
a=[1 2;3 4];
b=[-1 1;-2 2];
c2=filter2(a,b,'full')
c3=filter2(b,a,'full')输出结果:
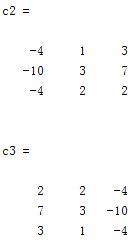
可以看出filter2函数已经不满足卷积的可交换律了
imfilter则是对函数filter2和conv2函数的综合,当选择参数conv时则,进行卷积计算与函数conv2函数相同, 选择corr参数时,进行相关运算和filter2过程相同
opencv中的滤波函数 cvFilter2D( const CvArr* src, CvArr* dst, const CvMat* kernel, CvPoint anchor CV_DEFAULT(cvPoint(-1,-1)))可以实现图像的卷及滤波,但是cvFilter2D处理时不对滤波核进行180度旋转,边界处理时实行镜像处理
#include "iostream"
#include "cv.h"
#include "highgui.h"
using namespace std;
void speedy_convolution(const CvMat *A,const CvMat *B,CvMat *C);
void ShowMat(CvMat *m);
int main()
{
float A1[]={1,2,3,4};float B1[]={-1,1,-2,2};
//float A[]={1,2,0,3,4,0,0,0,0};
//float B[]={-1,1,0,-2,2,0,0,0,0};
CvMat Ma1=cvMat(2,2,CV_32FC1,&A1);
CvMat Mb1=cvMat(2,2,CV_32FC1,&B1);
CvMat *C1=cvCreateMat(3,3,CV_32FC1);
CvMat *C=cvCreateMat(2,2,CV_32FC1);
double t=cvGetTickCount();
speedy_convolution(&Ma1,&Mb1,C1);//
t=cvGetTickCount()-t;
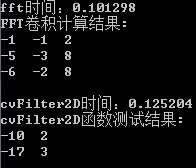
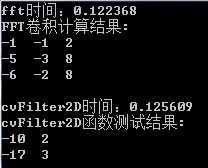
cout<<"fft时间:"<rows;i++)
{
for (j=0;jcols;j++)
{
cout<rows + B->rows -1);
int dft_N = cvGetOptimalDFTSize(A->cols + B->cols -1);
CvMat *dft_A = cvCreateMat(dft_M , dft_N , A->type);
CvMat *dft_B = cvCreateMat(dft_M, dft_N, B->type);
CvMat tmp;
//copy A TO dft_A and pad dft_A with zeros
cvGetSubRect(dft_A,&tmp , cvRect(0,0,A->cols,A->rows));
cvCopy(A,&tmp);
cvGetSubRect(dft_A,&tmp,cvRect(A->cols,0,dft_A->cols - A->cols , A->rows));
cvZero(&tmp);
//no need to pad bottom part of dft_A with zeros because of
//use nonzero_rows parameter in cvDFT() call below
cvDFT(dft_A,dft_A,CV_DXT_FORWARD,A->rows);
//repeat the same with the second array
cvGetSubRect(dft_B,&tmp,cvRect(0,0,B->cols,B->rows));
cvCopy(B,&tmp);
cvGetSubRect(dft_B,&tmp,cvRect(B->cols,0,dft_B->cols - B->cols , B->rows));
cvZero(&tmp);
//no need to pad bottom part of dft_B with zeros because of
//use nonzero-rows parameter in cvDFT() call below
cvDFT(dft_B,dft_B,CV_DXT_FORWARD,B->rows);
//or CV_DXT_MUL_CONJ to get correlation rather than convolution
cvMulSpectrums(dft_A,dft_B,dft_A,0);
//calculate only the top part
cvDFT(dft_A,dft_A,CV_DXT_INV_SCALE,C->rows);
cvGetSubRect(dft_A,&tmp,cvRect(0,0,C->cols,C->rows));
cvCopy(&tmp,C);
cvReleaseMat(&dft_A);
cvReleaseMat(&dft_B);
} 上面代码:函数speedy_convolution代码参考http://blog.csdn.net/fdl19881/article/details/6716202
测试结果: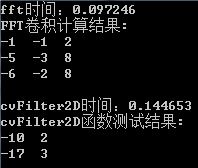
cvFilter2D 处理过程对Mb1的边界镜像补数为:
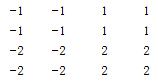
再以Ma1: 的cvPoint(1,1)为滤波核为中心进行掩膜计算
的cvPoint(1,1)为滤波核为中心进行掩膜计算
一般图像滤波的模板都是关于中心对称的,因此在计算图像卷积滤波时,是否对卷积模板旋转180度关系不是太大。
由于矩阵比较小,fft的效果不是太明显,如果是图像的维数比较大的话,效率的提高就比较可观了
以上只是本人的个人感悟,不当之处希望和大家一起进步。