图论算法的基础知识
图的表示
如果有向图是稠密的,也就是图中的边数 |E| 和定点数 |V| 满足如下关系 |E|=O(|V|2) 。那么我们就用二维数组来表示,如果有向图是稀疏的,也就是边数相当的少,那么我们就用邻接表来表示。它就是一个结构体数组,每个元素表示一个顶点,然后指向它的所有相邻的顶点(这个相邻是指出边)。
实际情况下,顶点名称都是字符串,我们需要把字符串映射成数字,这样容易处理,通常的做法就是用一个散列表来记录这种映射,关键字是这个字符串,值为赋给的数字。
但是在进行输出时,我们还是需要将数字变成相应的字符串,这样我们可以事先做一个字符串数组,这样就可以完成映射。
图论中常见的问题
1.拓扑排序.
算法1.1. 这个是针对有向无圈图来说的,如果顶点 v 有指向 w 的边,那么我们就将 v 排在 w 前面。如果图中有圈,这就不可能进行拓扑排序。首先,我们用时间复杂度为 O(|V|2) 的算法来实现。
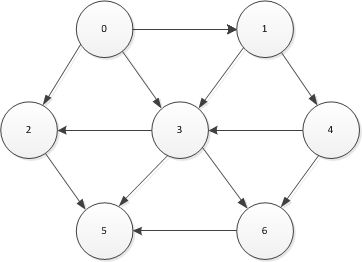
我们所用的图如下图所示
#include if(a[i]==0)
{
a[i]=-1;
return i;
}
}
return -1;
}
int* Topsort(Graph g,int in[])
{
n=g->node_num;
int i,temp_int;
int *Topnum=malloc(sizeof(int)*n);
Node temp;
for(i=0;iif(temp_int==-1)
{
printf("error,graph has a cycle");
break;
}
Topnum[temp_int]=i+1;
temp=g->table[temp_int]->next;
while(temp!=NULL)
{
in[temp->num]--;
temp=temp->next;
}
}
return Topnum;
}
int main()
{
//因为没有办法直接读图,所以将图的信息转化成如下的矩阵信息,然后由这个矩阵来生成相应的邻接表,再对邻接表进行处理
int Array[7][7]={{0,1,1,1,0,0,0},{0,0,0,1,1,0,0},{0,0,0,0,0,1,0},{0,0,1,0,0,1,1},{0,0,0,1,0,0,1},{0,0,0,0,0,0,0},{0,0,0,0,0,1,0}};
Graph Adj_list=malloc(sizeof(struct graph));
Adj_list->node_num=7;
Adj_list->table=malloc(sizeof(struct node *)*7);
Node temp;
int i,j;
int Indegree[7]={0,1,2,3,1,3,2};
//将图读入邻接表中
for(i=0;i<7;i++)
{
Adj_list->table[i]=malloc(sizeof(struct node));
Adj_list->table[i]->num=i;
Adj_list->table[i]->next=NULL;
temp=Adj_list->table[i];
for(j=0;j<7;j++)
{
if(Array[i][j]==1)
{
Node new_node=malloc(sizeof(struct node));
new_node->num=j;
new_node->next=NULL;
temp->next=new_node;
temp=temp->next;
}
}
}
int *Topnum=Topsort(Adj_list,Indegree,7);
for(i=0;i<7;i++)
{
printf("%d ",Topnum[i]);
}
}
这种算法的思想就是,首先将每个顶点的入度列到一个数组中记为Indegree,首先找到顶点集中入度为0的顶点,如果没有入度为零的顶点,那么说明这个图是有圈的,是不存在拓扑排序的。然后将顶点为入度为零的点相邻的点的入度减1,输出这个顶点。再从Indegree中寻找下一个顶点入度为零的点,依次这样进行,直到所有的点全部输出为止。
算法1.2. 上述算法的时间复杂度比较大,所以下面对算法1的时间复杂度进行改进。我们首先将入度为零的顶点筛选出来,放入到队列中,这个时间复杂度为 O(n) ,然后令一个顶点A出列,让这个顶点的相邻点的入度减1,时间复杂度为 O(k) ,k表示A的邻点的个数。然后看这些邻点的入度是否为零,如果为零,那么让这些邻点入队列,如果都不为零,说明这个图中有圈的存在,不存在拓扑排序。总的来说,时间复杂度为 O(n+m) ,m为边的个数。算法的实现如下:
int* algorithm2(Graph g,int *Ind)
{
int n=g->node_num;
int queue[n+1];
int head=0,rear=0;
int zero_ele;
int i;
int order=0;
Node temp;
int *result=malloc(sizeof(int)*n);
//对Ind进行扫描,选出所有入度为零的点
for(i=0;iif(Ind[i]==0)
{
queue[rear]=i;
rear++;
}
}
if(rear==0)
{
printf("error,the graph has a cycle\n");
return NULL;
}
while(head!=rear)
{
zero_ele=queue[head];
result[zero_ele]=++order;
head++;
temp=g->table[zero_ele]->next;
while(temp!=NULL)
{
Ind[temp->num]--;
if(Ind[temp->num]==0)
{
queue[rear]=temp->num;
rear++;
}
temp=temp->next;
}
}
free(queue);
if(head!=n)
{
printf("error,the graph has a cycle\n");
return NULL;
}
else
return result;
} 2.最短路径算法. 我们主要考虑单源最短路径问题,也就是给定一个赋权图G=(V,E),和一个特定的顶点s作为输入,找出从s到G中每一个其他顶点的最短赋权路径。
2.1无权图最短路径
无权就表示图中的边的权重为1.首先我们用一个时间复杂度为 O(|V|2) 的算法来解决无权有向图中的单源最短路径问题。
算法2.1.1 首先,从一个特定的顶点s出发,那么从s到s的最短路径长度就是0;然后,我们找到和s相邻的顶点,这些顶点到s的最短距离就是1,我们将这些顶点进行标记,表示已经找到s到这些顶点的最短路径。接下来,我们要找到距离s为2的顶点,我们可以从s的邻点a出发,找到距离a为1的那些没有被标记的顶点,显然s到这些顶点的最短路径为2.随后对这些顶点进行标记。直到所有的点都被标记,程序就结束了。具体的代码实现如下
struct info
{
int distance;//表示到特定的s点的最短路径长度
int before;//表示这个点的上一个定点
int sign;//是否已经被处理
};
typedef struct info *Info;
Info* shortest_path(int vertex,Graph g)
{
int n=g->node_num;
//构造信息表
Info *information=malloc(sizeof(struct info*)*n);
int i;
for(i=0;istruct info));
information[i]->distance=Max;
information[i]->before=-1;
information[i]->sign=0;
}
information[vertex]->distance=0;
int currdist=0;
int sum_sign=0;
Node temp;
for(currdist=0;currdistif(sum_sign==n)
break;
for(i=0;iif(information[i]->distance==currdist&&information[i]->sign==0)
{
information[i]->sign=1;
sum_sign++;
temp=g->table[i]->next;
while(temp!=NULL)
{
if(information[temp->num]->before==-1)
{
information[temp->num]->distance=currdist+1;
information[temp->num]->before=i;
}
temp=temp->next;
}
}
}
}
return information;
} 算法的主干由两个for循环构成,最坏情况下,currdist=d-1,这时候图就是一个链状结构,所以最坏情况下的时间复杂度为 O(n2) 。
算法2.1.2. 我们可以类似改进拓扑排序那样对算法1进行改进,首先让需要求它到其他各点最短路径的点入队列,它进行处理时,让它出队列,然后对它的邻点进行处理,更改邻点在信息表中的信息,然后让邻点入队列,知道队列为空结束。相应的代码如下
Info *algorithm2_short(int vertex,Graph g)
{
int n=g->node_num;
//构造信息表
Info *information=malloc(sizeof(struct info*)*n);
int queue[n];
int head=0;
int rear=0;
int i;
for(i=0;imalloc(sizeof(struct info));
information[i]->distance=Max;
information[i]->before=-1;
information[i]->sign=0;
}
information[vertex]->distance=0;
queue[rear]=vertex;
rear++;
int currverdex=0;
Node temp;
while(head!=rear)
{
currverdex=queue[head];
head++;
information[currverdex]->sign=1;
temp=g->table[currverdex]->next;
while(temp!=NULL)
{
if(information[temp->num]->before==-1)
{
information[temp->num]->distance=information[currverdex]->distance+1;
information[temp->num]->before=currverdex;
queue[rear]=temp->num;
rear++;
}
temp=temp->next;
}
}
return information;
} 进入队列时,我们先检验是否这个点已经进入队列,如果进入队列,就不在让其进入队列。这样最多是所有的点都进入了一次队列,然后在对每个出队列的节点的邻点进行信息更新,这所花费的时间就是它的出边数,所以这个时间复杂度为 O(|V|+|E|)
2.2非负有向加权图最短路径.
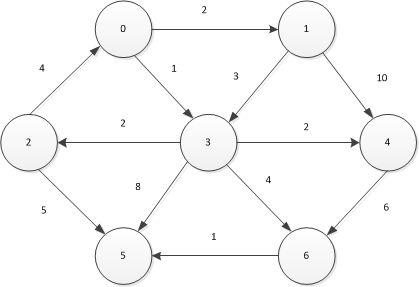
我们考虑如下的非负有向加权图
当图中没有负值权重时,我们可以证明运用Dijkstra算法可以解决最短路径问题。过程如下,首先选择一个点a,作为出发点,然后将它的邻点b的信息进行更新,更新的内容为到目前为止,从a到b的最短距离,所谓到目前为止就是从a出发,经过已经处理过的点到b。然后就是贪心算法,我们选择当前没有被处理过的点中距离a的最短的点,对这个点进行处理,把它更新为已处理点,把它的邻点进行更新,使得它的邻点到a的距离为到目前为止最短的。可以证明,c是将要被处理的点,那么我们就说从a到c的最短路径m已经确定,它是目前经过已处理的点到c的最短路径,也是全局的从a到c的最短路径,原因在如果存在另一个最短路径 l ,使得从a到c的距离比m短,那么 l 必须经过a的邻点,我们假设为d,同时 l 必然要经过一个未被处理的点f,然后才能到c,这显然已经违背了选择下一个要处理的点的原则–就是这个点是当前未被处理的点中与a距离最短的点。我们之所以选择c为下一个要处理的点的原因就是c与a的距离小于f和a的距离。
下面实现这个算法的代码:
#include struct info));
info_table[i]->distance=MAX;
info_table[i]->before=-1;
info_table[i]->sign=0;
}
info_table[vertex]->distance=0;
for(;;)
{
int min_dist=MAX;
int min_vertex;
int new_len;
for(i=0;iif(min_dist>info_table[i]->distance&&info_table[i]->sign==0)
{
min_dist=info_table[i]->distance;
min_vertex=i;
}
if(min_dist==MAX)
break;
info_table[min_vertex]->sign=1;
temp=g->table[min_vertex]->next;
while(temp!=NULL)
{
new_len=info_table[min_vertex]->distance+temp->weight;
if(new_lennum]->distance)
{
info_table[temp->num]->distance=new_len;
info_table[temp->num]->before=min_vertex;
}
temp=temp->next;
}
}
return info_table;
} 主函数为
int main()
{
int Array[7][7]={{0,2,0,1,0,0,0},
{0,0,0,3,10,0,0},
{4,0,0,0,0,5,0},
{0,0,2,0,2,8,4},
{0,0,0,0,0,0,6},
{0,0,0,0,0,0,0},
{0,0,0,0,0,1,0}};
Graph Adj_list=malloc(sizeof(struct graph));
Adj_list->node_num=7;
Adj_list->table=malloc(sizeof(struct node *)*7);
Node temp;
int i,j;
//将图读入邻接表中
for(i=0;i<7;i++)
{
Adj_list->table[i]=malloc(sizeof(struct node));
Adj_list->table[i]->num=i;
Adj_list->table[i]->weight=0;
Adj_list->table[i]->next=NULL;
temp=Adj_list->table[i];
for(j=0;j<7;j++)
{
if(Array[i][j]!=0)
{
Node new_node=malloc(sizeof(struct node));
new_node->num=j;
new_node->weight=Array[i][j];
new_node->next=NULL;
temp->next=new_node;
temp=temp->next;
}
}
}
Info *information=Dijkstra(0,Adj_list);
}这个Dijkstra算法的时间复杂度为 O(|E|+|V|2) ,原因是算法的每一步都要计算出最小距离的点,这个时间消耗是 O(|V|) 。如果 |E|=O(|V|2) ,这种方法是比较好的,但是如果边是稀疏的那么这种方法就比较浪费时间。改进方法牵扯到配对堆和斐波那契堆的使用,这里暂且不讲。
同时由于这种算法是贪心算法,它每次都要选择最短的当前距离,所以是不能用队列实现像无权图那样的改进的。
2.3.无圈图. 假设一个赋权有向图是无圈的,那么我们就可以运用拓扑排序来实现寻找最短路径问题。我们的目的是要找出从 a 到其他各顶点的最短路径。首先,我们对这个图所有顶点进行拓扑排序,我们注意排在 a 之前的顶点是从 a 无法到达的,所以排在 a 之前的顶点的信息进行更新时,只需标记为已处理状态,从 a 可以到达的顶点一定是排在 a 之后的,但是 a 不一定能够到达所有排在它之后的顶点。在拓扑排序进行过程中,我们需要对 a 的邻点的入度进行减1处理,这个时候对 a 的邻点进行信息的更新,更新内容包括当前距离(distance),以及路径上一个节点(before)。针对进入队列中的点,如果它的距离仍然是无穷大,那么说明 a 无法到达这个顶点的,把它标记为已处理,对其邻点只进行入度减一操作,否者,对其邻点再增加信息更新操作,包括当前最短路径距离(distance)和路径的上一个节点(before),进入队列中的点,如果 a 可以到达它,那么它的最短路径是已经确定的,原因是没有未知(也就是没有进行拓扑排序的)的节点可以进入它,显然他的最短路径不可能再被更新。这样,我们只需对所有的点和所有的边进行一次的遍历,就可以完成最短路径的确定问题。代码如下:
Info * top_path(Graph g,int *Indegree,int vertex)
{
int vertex_n=g->node_num;
int queue[vertex];
int head=0;
int rear=0;
int i;
//信息表的确定
Info *info_table=malloc(sizeof(Info)*vertex_n);
for(i=0;imalloc(sizeof(struct info));
info_table[i]->distance=MAX;
info_table[i]->before=-1;
info_table[i]->sign=0;
}
info_table[vertex]->distance=0;
//入度为零的节点入队列
for(i=0;iif(Indegree[i]==0)
{
queue[rear]=i;
rear++;
}
}
int curr;
Node temp;
int new_len;
while(head!=rear)
{
curr=queue[head];
head++;
printf("%d",curr);
info_table[curr]->sign=1;
temp=g->table[curr]->next;
while(temp!=NULL)
{
if(info_table[curr]->distance!=MAX)
{
new_len=info_table[curr]->distance+temp->weight;
if(new_lennum]->distance)
{
info_table[temp->num]->distance=new_len;
info_table[temp->num]->before=curr;
}
}
Indegree[temp->num]--;
if(Indegree[temp->num]==0)
{
queue[rear]=temp->num;
rear++;
}
temp=temp->next;
}
}
return info_table;
} 3.最大网络流. 首先,我们先描述一下网络流问题。流网络 G=(V,E) 是一个有向图,其中每条边 (u,v)∈E 均有一非负容量 c(u,v)≥0 ,如果 (v,u)∈E ,那么 c(u,v)=0 .流网络中有两个特别的顶点:源点s和汇点t。同时我们假设每个顶点是出在从源点到汇点的一条路径上。 G 的流是一个实值函数 f:V∗V→R ,某个边上的流不超过这个边的容量。我们的问题就是寻找从s到t的最大值流,也就是求一个流函数,使得下式最大
基本的算法就是Ford-Fulkerson方法,我们借用《算法导论》中的伪代码来说明
for each edgd(u,v) in E
{
do f[u,v]=0
f[v,u]=0
}
while there exists a path p from s to t in the residual network Gf
{
do cf(p)=min{cf(u,v):(u,v) is in p}
for each edge(u,v) in p
{
do f[u,v]=f[u,v]+cf(p)
f[v,u]=-f[u,v]
}
}
代码的1-5行是对流函数f的初始化,代码的第六行出现了一个残余网络的概念 (residualnetwork) ,它是针对当前的邻接矩阵(也就是一个网络流图写成矩阵的形式),当前的流函数 f ,给出每条边 (u,v) 的剩余流量 cf(u,v)=c(u,v)−f(u,v) ,顶点是不变的图。在这样的一个残余网络中寻找从 s 到 t 的一条增广路 p ,其实也就是一条从 s 到 t 的路径,路径上的边的值大于零。代码的第7行是找到这条增广路径上边的最小剩余流量记为 cf(p) ,然后代码的第8-11行就是对流函数的更新,对于 p 上的每一条边 (u,v) ,更新其流量;对于这条路径上的反向边 (v,u) ,也更新其流量,这样做的目的是为了得到下一个残余网络,然后对下一个残余网络做相同的处理,直到残余网络中没有增广路径为止。那么每次的 cf(p) 的和就是我们所要求的最大流值。
针对上述代码的8-11行,我们可以将它和下一个剩余网络的生成进行合并,也就是针对当前的剩余网络,我们把路径 p 上的边,以及这些边的逆边做如下更新
那么现在最大的问题就是如何在剩余网络中寻找增广路径了。这时候就轮到 E−K 算法出场了, E−K 算法只是解决了如何寻找增广路径问题,它是对Ford-Fulkerson方法进一步具体化。
Edmonds-Karp算法. 算法实际上就是采用广度优先搜索来实现对增广路径的p的计算。具体的代码如下:
int E_K(int _start,int _end,vector<vector<int> > &adj_matrix,int before[],int n)
{
queue<int> que;//队列,用于BFS
vector<int> sign(n,0);//表示节点是否已经处理
int temp;
int i;
que.push(_start);
sign[_start]=1;
while(!que.empty())
{
temp=que.front();
que.pop();
for(i=0;iif(adj_matrix[temp][i]>0&&sign[i]==0)
{
before[i]=temp;
sign[i]=1;//注意
if(i==_end) return 1;
que.push(i);
}
}
}
return 0;
} 注:该函数中包含的参数有个before,主要是用来记录搜索到的增广路径的。 start 和 end 分别表示源点和汇点。
然后我们针对如下图的一个实例来实现 Ford−Fulkerson 算法。

代码如下:
int F_F(int _start,int _end,vector<vector<int> > &adj_matrix,int n)
{
int max_flow=0;
int path[n];
int arg_path=E_K(_start,_end,adj_matrix,path,n);
while(arg_path)
{
//找到增广路径上的边的最小流量
int _min=1<<30;
int next=_end;
while(next!=_start)
{
if(adj_matrix[path[next]][next]<_min)
_min=adj_matrix[path[next]][next];
next=path[next];
}
//对邻接矩阵进行更新
next=_end;
while(next!=_start)
{
adj_matrix[path[next]][next]-=_min;
adj_matrix[next][path[next]]=_min;
next=path[next];
}
max_flow+=_min;
arg_path=E_K(_start,_end,adj_matrix,path,n);
}
return max_flow;
} 4.最大生成树
最大生成树研究的对象是无向有权图,最小生成数就是连接图中所有的点的边构成的树,并且其权值最小。我们针对连通图来说明两种实现的算法。
算法1.Prim
1.设一个集合 S
2.构造一个信息表,记录所有顶点的一下三项信息:(1)是否被处理 sign,(2)到集合S的最短距离distance,(3)它的上一个顶点before。信息表初试化为,处理状态为0,到集合S的距离为无穷大,上一个顶点为-1。
3.选择一个顶点,更新它的distance为0。
4.选择distance最小的点a,更新它在信息表中的信息,处理状态为1,到集合S的最小距离为distance,然后将它放入集合S中。
5.更新a的邻点到S的最短距离以及它们的before为a,转到步骤4。
代码如下:
int min(int x,int y)
{
return x>y?y:x;
}
struct node
{
int num;
int weight;
struct node *next;
};
typedef struct node * Node;
struct graph
{
int node_num;
Node *table;
};
typedef struct graph * Graph;
struct info
{
int distance;//表示到特定的s点的最短路径长度
int before;//表示这个点的上一个顶点
int sign;//是否已经被处理
};
typedef struct info *Info;
int find_min(Info *info_list,int n)
{
int i;
int min_dis=MAX;
int min_vertex;
for(i=0;iif(info_list[i]->distancesign==0)
{
min_dis=info_list[i]->distance;
min_vertex=i;
}
}
if(min_dis==MAX)
return -1;
return min_vertex;
}
Info *Prim(Graph g)
{
int n=g->node_num;
Info * info_list=malloc(sizeof(Info)*n);
int i;
for(i=0;istruct info));
info_list[i]->distance=MAX;
info_list[i]->before=-1;
info_list[i]->sign=0;
}
info_list[0]->distance=0;
Node temp;
int adj_node;
int min_vertex;
for(;;)
{
min_vertex=find_min(info_list,n);
if(min_vertex==-1)
break;
info_list[min_vertex]->sign=1;
temp=g->table[min_vertex]->next;
while(temp!=NULL)
{
adj_node=temp->num;
if(info_list[adj_node]->sign==0&&info_list[temp->num]->distance>temp->weight)
{
info_list[temp->num]->distance=temp->weight;
info_list[temp->num]->before=min_vertex;
}
temp=temp->next;
}
}
return info_list;
}
算法4.2.Kruskal算法
Kruskal算法
1.对所有的边进行从大到小排序,排序依据是它的权重。
2.将图中所有的边去掉,只剩下点
3.然后选择最小权重的边,加入图中,看是否形成圈,如果没有就添加进去,否则就丢掉。重复3步骤直到添加的边数为点数减1.
注:持续实现选择最小边的数据结构是用优先队列,而将边添加到图中是不相交集的思想(不相交集ADT)
代码如下:
#include return true;
else
return false;
}
struct cmp
{
bool operator()(edge a,edge b)
{
if(a.weight>b.weight) return 1;
return 0;
}
};
int Find(vector<int> dis_set,int u)
{
if(dis_set[u]<0)
return u;
else
return Find(dis_set,dis_set[u]);
}
vector<int> kruskal(priority_queuevector,cmp> p,int n)
{
//定义不相交集,每个单元表示一个类
int total_edge=0;
vector<int> disjset(n,-1);
while(total_edgeint U=temp.Start;
int V=temp.End;
int U_root=Find(disjset,U);
int V_root=Find(disjset,V);
if(U_root!=V_root)
{
if(disjset[U_root]//union
else
disjset[U]=V;
total_edge++;
}
}
return disjset;
} 主函数如下:
int main()
{
int adj_matrix[7][7]={{0,2,4,1,0,0,0},
{2,0,0,3,10,0,0},
{4,0,0,2,0,5,0} ,
{1,3,2,0,7,8,4} ,
{0,10,0,7,0,0,6},
{0,0,5,8,0,0,1} ,
{0,0,0,4,6,1,0}
};
int i,j;
priority_queue<edge,vector<edge>,cmp> p_que;//关键
for(i=0;i<7;i++)
{
for(j=i;j<7;j++)
{
if(adj_matrix[i][j]>0)
{
edge new_e;
new_e.Start=i;
new_e.End=j;
new_e.weight=adj_matrix[i][j];
p_que.push(new_e);
}
}
}
vector<int> result=kruskal(p_que,7);
for(i=0;i<7;i++)
{
if(result[i]>0)
cout<<"("<<i<<","<<result[i]<<")"<<endl;
}
return 0;
}