Binder系列6—获取服务(getService)
一、 获取服务
在Native层的服务注册,我们选择以media为例来展开讲解,先来看看media的类关系图。
1.1 类图
点击查看大图
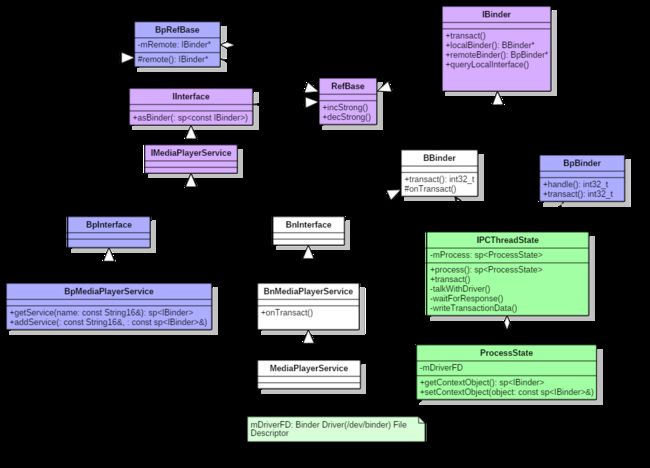
图解:
- 蓝色: 代表获取MediaPlayerService服务相关的类;
- 绿色: 代表Binder架构中与Binder驱动通信过程中的最为核心的两个类;
- 紫色: 代表注册服务和获取服务的公共接口/父类;
二. 获取Media服务
2.1 getMediaPlayerService
[-> framework/av/media/libmedia/IMediaDeathNotifier.cpp]
sp&
IMediaDeathNotifier::getMediaPlayerService()
{
Mutex::Autolock _l(sServiceLock);
if (sMediaPlayerService == 0) {
sp sm = defaultServiceManager(); //获取ServiceManager
sp binder;
do {
//获取名为"media.player"的服务 【见2.2】
binder = sm->getService(String16("media.player"));
if (binder != 0) {
break;
}
usleep(500000); // 0.5s
} while (true);
if (sDeathNotifier == NULL) {
sDeathNotifier = new DeathNotifier(); //创建死亡通知对象
}
//将死亡通知连接到binder 【见流程14】
binder->linkToDeath(sDeathNotifier);
sMediaPlayerService = interface_cast(binder);
}
return sMediaPlayerService;
}
其中defaultServiceManager()过程在上一篇文章获取ServiceManager已讲过,返回BpServiceManager。
在请求获取名为”media.player”的服务过程中,采用不断循环获取的方法。由于MediaPlayerService服务可能还没向ServiceManager注册完成或者尚未启动完成等情况,故则binder返回为NULL,休眠0.5s后继续请求,直到获取服务为止。
2.2 BpSM.getService
[-> IServiceManager.cpp ::BpServiceManager]
virtual sp getService(const String16& name) const
{
unsigned n;
for (n = 0; n < 5; n++){
sp svc = checkService(name); //【见2.3】
if (svc != NULL) return svc;
sleep(1);
}
return NULL;
}
通过BpServiceManager来获取MediaPlayer服务:检索服务是否存在,当服务存在则返回相应的服务,当服务不存在则休眠1s再继续检索服务。该循环进行5次。为什么是循环5次呢,这估计跟Android的ANR时间为5s相关。如果每次都无法获取服务,循环5次,每次循环休眠1s,忽略checkService()的时间,差不多就是5s的时间
2.3 BpSM.checkService
[-> IServiceManager.cpp ::BpServiceManager]
virtual sp checkService( const String16& name) const
{
Parcel data, reply;
//写入RPC头
data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor());
//写入服务名
data.writeString16(name);
remote()->transact(CHECK_SERVICE_TRANSACTION, data, &reply); //【见2.4】
return reply.readStrongBinder(); //【见小节2.9】
}
检索指定服务是否存在, 其中remote()为BpBinder。
2.4 BpBinder::transact
[-> BpBinder.cpp]
status_t BpBinder::transact(
uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
{
if (mAlive) {
//【见流程2.5】
status_t status = IPCThreadState::self()->transact(
mHandle, code, data, reply, flags);
if (status == DEAD_OBJECT) mAlive = 0;
return status;
}
return DEAD_OBJECT;
}
Binder代理类调用transact()方法,真正工作还是交给IPCThreadState来进行transact工作,
2.4.1 IPCThreadState::self
[-> IPCThreadState.cpp]
IPCThreadState* IPCThreadState::self()
{
if (gHaveTLS) {
restart:
const pthread_key_t k = gTLS;
IPCThreadState* st = (IPCThreadState*)pthread_getspecific(k);
if (st) return st;
return new IPCThreadState; //初始IPCThreadState 【见小节2.4.2】
}
if (gShutdown) return NULL;
pthread_mutex_lock(&gTLSMutex);
if (!gHaveTLS) { //首次进入gHaveTLS为false
if (pthread_key_create(&gTLS, threadDestructor) != 0) { //创建线程的TLS
pthread_mutex_unlock(&gTLSMutex);
return NULL;
}
gHaveTLS = true;
}
pthread_mutex_unlock(&gTLSMutex);
goto restart;
}
TLS是指Thread local storage(线程本地储存空间),每个线程都拥有自己的TLS,并且是私有空间,线程之间不会共享。通过pthread_getspecific/pthread_setspecific函数可以获取/设置这些空间中的内容。从线程本地存储空间中获得保存在其中的IPCThreadState对象。
2.4.2 IPCThreadState初始化
[-> IPCThreadState.cpp]
IPCThreadState::IPCThreadState()
: mProcess(ProcessState::self()),
mMyThreadId(gettid()),
mStrictModePolicy(0),
mLastTransactionBinderFlags(0)
{
pthread_setspecific(gTLS, this);
clearCaller();
mIn.setDataCapacity(256);
mOut.setDataCapacity(256);
}
每个线程都有一个IPCThreadState,每个IPCThreadState中都有一个mIn、一个mOut。成员变量mProcess保存了ProcessState变量(每个进程只有一个)。
- mIn 用来接收来自Binder设备的数据,默认大小为256字节;
- mOut用来存储发往Binder设备的数据,默认大小为256字节。
2.5 IPC::transact
[-> IPCThreadState.cpp]
status_t IPCThreadState::transact(int32_t handle,
uint32_t code, const Parcel& data,
Parcel* reply, uint32_t flags)
{
status_t err = data.errorCheck(); //数据错误检查
flags |= TF_ACCEPT_FDS;
....
if (err == NO_ERROR) {
// 传输数据 【见流程2.6】
err = writeTransactionData(BC_TRANSACTION, flags, handle, code, data, NULL);
}
if (err != NO_ERROR) {
if (reply) reply->setError(err);
return (mLastError = err);
}
if ((flags & TF_ONE_WAY) == 0) { //flags=0进入该分支
if (reply) {
//等待响应 【见流程2.7】
err = waitForResponse(reply);
} else {
Parcel fakeReply;
err = waitForResponse(&fakeReply);
}
} else {
//不需要响应消息的binder则进入该分支
err = waitForResponse(NULL, NULL);
}
return err;
}
2.6 IPC.writeTransactionData
[-> IPCThreadState.cpp]
status_t IPCThreadState::writeTransactionData(int32_t cmd, uint32_t binderFlags,
int32_t handle, uint32_t code, const Parcel& data, status_t* statusBuffer)
{
binder_transaction_data tr;
tr.target.ptr = 0;
tr.target.handle = handle; // handle = 0
tr.code = code; // code = CHECK_SERVICE_TRANSACTION
tr.flags = binderFlags; // binderFlags = 0
tr.cookie = 0;
tr.sender_pid = 0;
tr.sender_euid = 0;
// data为记录Media服务信息的Parcel对象
const status_t err = data.errorCheck();
if (err == NO_ERROR) {
tr.data_size = data.ipcDataSize(); // mDataSize
tr.data.ptr.buffer = data.ipcData(); //mData
tr.offsets_size = data.ipcObjectsCount()*sizeof(binder_size_t); //mObjectsSize
tr.data.ptr.offsets = data.ipcObjects(); //mObjects
} else if (statusBuffer) {
...
} else {
return (mLastError = err);
}
mOut.writeInt32(cmd); //cmd = BC_TRANSACTION
mOut.write(&tr, sizeof(tr)); //写入binder_transaction_data数据
return NO_ERROR;
}
其中handle的值用来标识目的端,注册服务过程的目的端为service manager,此处handle=0所对应的是binder_context_mgr_node对象,正是service manager所对应的binder实体对象。binder_transaction_data结构体是binder驱动通信的数据结构,该过程最终是把Binder请求码BC_TRANSACTION和binder_transaction_data结构体写入到mOut。
2.7 IPC.waitForResponse
[-> IPCThreadState.cpp]
status_t IPCThreadState::waitForResponse(Parcel *reply, status_t *acquireResult)
{
int32_t cmd;
int32_t err;
while (1) {
if ((err=talkWithDriver()) < NO_ERROR) break; // 【见流程2.8】
err = mIn.errorCheck();
if (err < NO_ERROR) break;
if (mIn.dataAvail() == 0) continue;
cmd = mIn.readInt32();
switch (cmd) {
case BR_TRANSACTION_COMPLETE: ...
case BR_DEAD_REPLY: ...
case BR_FAILED_REPLY: ...
case BR_ACQUIRE_RESULT: ...
case BR_REPLY:
{
binder_transaction_data tr;
err = mIn.read(&tr, sizeof(tr));
if (reply) {
if ((tr.flags & TF_STATUS_CODE) == 0) {
reply->ipcSetDataReference(
reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast<const binder_size_t*>(tr.data.ptr.offsets),
tr.offsets_size/sizeof(binder_size_t),
freeBuffer, this);
} else {
...
}
}
}
goto finish;
default:
err = executeCommand(cmd);
if (err != NO_ERROR) goto finish;
break;
}
}
...
return err;
}
2.8 IPC.talkWithDriver
[-> IPCThreadState.cpp]
status_t IPCThreadState::talkWithDriver(bool doReceive)
{
...
binder_write_read bwr;
const bool needRead = mIn.dataPosition() >= mIn.dataSize();
const size_t outAvail = (!doReceive || needRead) ? mOut.dataSize() : 0;
bwr.write_size = outAvail;
bwr.write_buffer = (uintptr_t)mOut.data();
if (doReceive && needRead) {
//接收数据缓冲区信息的填充。如果以后收到数据,就直接填在mIn中了。
bwr.read_size = mIn.dataCapacity();
bwr.read_buffer = (uintptr_t)mIn.data();
} else {
bwr.read_size = 0;
bwr.read_buffer = 0;
}
//当读缓冲和写缓冲都为空,则直接返回
if ((bwr.write_size == 0) && (bwr.read_size == 0)) return NO_ERROR;
bwr.write_consumed = 0;
bwr.read_consumed = 0;
status_t err;
do {
//通过ioctl不停的读写操作,跟Binder Driver进行通信【2.8.1】
if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0)
err = NO_ERROR;
...
} while (err == -EINTR); //当被中断,则继续执行
...
return err;
}
binder_write_read结构体用来与Binder设备交换数据的结构, 通过ioctl与mDriverFD通信,是真正与Binder驱动进行数据读写交互的过程。 先向service manager进程发送查询服务的请求(BR_TRANSACTION),见Binder系列3—启动ServiceManager。当service manager进程收到该命令后,会执行do_find_service() 查询服务所对应的handle,然后再binder_send_reply()应答 发起者,发送BC_REPLY协议,然后调用binder_transaction(),再向服务请求者的Todo队列 插入事务。
接下来,再看看binder_transaction过程。
2.8.1 binder_transaction
static void binder_transaction(struct binder_proc *proc,
struct binder_thread *thread,
struct binder_transaction_data *tr, int reply){
//根据各种判定,获取以下信息:
struct binder_thread *target_thread; //目标线程
struct binder_proc *target_proc; //目标进程
struct binder_node *target_node; //目标binder节点
struct list_head *target_list; //目标TODO队列
wait_queue_head_t *target_wait; //目标等待队列
...
//分配两个结构体内存
struct binder_transaction *t = kzalloc(sizeof(*t), GFP_KERNEL);
struct binder_work *tcomplete = kzalloc(sizeof(*tcomplete), GFP_KERNEL);
//从target_proc分配一块buffer
t->buffer = binder_alloc_buf(target_proc, tr->data_size,
for (; offp < off_end; offp++) {
switch (fp->type) {
case BINDER_TYPE_BINDER: ...
case BINDER_TYPE_WEAK_BINDER: ...
case BINDER_TYPE_HANDLE:
case BINDER_TYPE_WEAK_HANDLE: {
struct binder_ref *ref = binder_get_ref(proc, fp->handle,
fp->type == BINDER_TYPE_HANDLE);
...
//此时运行在servicemanager进程,故ref->node是指向服务所在进程的binder实体,
//而target_proc为请求服务所在的进程,此时并不相等。
if (ref->node->proc == target_proc) {
if (fp->type == BINDER_TYPE_HANDLE)
fp->type = BINDER_TYPE_BINDER;
else
fp->type = BINDER_TYPE_WEAK_BINDER;
fp->binder = ref->node->ptr;
fp->cookie = ref->node->cookie; //BBinder服务的地址
binder_inc_node(ref->node, fp->type == BINDER_TYPE_BINDER, 0, NULL);
} else {
struct binder_ref *new_ref;
//请求服务所在进程并非服务所在进程,则为请求服务所在进程创建binder_ref
new_ref = binder_get_ref_for_node(target_proc, ref->node);
fp->binder = 0;
fp->handle = new_ref->desc; //重新赋予handle值
fp->cookie = 0;
binder_inc_ref(new_ref, fp->type == BINDER_TYPE_HANDLE, NULL);
}
} break;
case BINDER_TYPE_FD: ...
}
}
//分别target_list和当前线程TODO队列插入事务
t->work.type = BINDER_WORK_TRANSACTION;
list_add_tail(&t->work.entry, target_list);
tcomplete->type = BINDER_WORK_TRANSACTION_COMPLETE;
list_add_tail(&tcomplete->entry, &thread->todo);
if (target_wait)
wake_up_interruptible(target_wait);
return;
}
这个过程非常重要,分两种情况来说:
- 当请求服务的进程与服务属于不同进程,则为请求服务所在进程创建binder_ref对象,指向服务进程中的binder_node;
- 当请求服务的进程与服务属于同一进程,则不再创建新对象,只是引用计数加1,并且修改type为BINDER_TYPE_BINDER或BINDER_TYPE_WEAK_BINDER。
2.8.2 binder_thread_read
binder_thread_read(...){
...
//当线程todo队列有数据则执行往下执行;当线程todo队列没有数据,则进入休眠等待状态
ret = wait_event_freezable(thread->wait, binder_has_thread_work(thread));
...
while (1) {
uint32_t cmd;
struct binder_transaction_data tr;
struct binder_work *w;
struct binder_transaction *t = NULL;
//先从线程todo队列获取事务数据
if (!list_empty(&thread->todo)) {
w = list_first_entry(&thread->todo, struct binder_work, entry);
// 线程todo队列没有数据, 则从进程todo对获取事务数据
} else if (!list_empty(&proc->todo) && wait_for_proc_work) {
...
}
switch (w->type) {
case BINDER_WORK_TRANSACTION:
//获取transaction数据
t = container_of(w, struct binder_transaction, work);
break;
case : ...
}
//只有BINDER_WORK_TRANSACTION命令才能继续往下执行
if (!t) continue;
if (t->buffer->target_node) {
...
} else {
tr.target.ptr = NULL;
tr.cookie = NULL;
cmd = BR_REPLY; //设置命令为BR_REPLY
}
tr.code = t->code;
tr.flags = t->flags;
tr.sender_euid = t->sender_euid;
if (t->from) {
struct task_struct *sender = t->from->proc->tsk;
//当非oneway的情况下,将调用者进程的pid保存到sender_pid
tr.sender_pid = task_tgid_nr_ns(sender, current->nsproxy->pid_ns);
} else {
...
}
tr.data_size = t->buffer->data_size;
tr.offsets_size = t->buffer->offsets_size;
tr.data.ptr.buffer = (void *)t->buffer->data +
proc->user_buffer_offset;
tr.data.ptr.offsets = tr.data.ptr.buffer +
ALIGN(t->buffer->data_size,
sizeof(void *));
//将cmd和数据写回用户空间
put_user(cmd, (uint32_t __user *)ptr);
ptr += sizeof(uint32_t);
copy_to_user(ptr, &tr, sizeof(tr));
ptr += sizeof(tr);
list_del(&t->work.entry);
t->buffer->allow_user_free = 1;
if (cmd == BR_TRANSACTION && !(t->flags & TF_ONE_WAY)) {
...
} else {
t->buffer->transaction = NULL;
kfree(t); //通信完成则运行释放
}
break;
}
done:
*consumed = ptr - buffer;
if (proc->requested_threads + proc->ready_threads == 0 &&
proc->requested_threads_started < proc->max_threads &&
(thread->looper & (BINDER_LOOPER_STATE_REGISTERED |
BINDER_LOOPER_STATE_ENTERED))) {
proc->requested_threads++;
// 生成BR_SPAWN_LOOPER命令,用于创建新的线程
put_user(BR_SPAWN_LOOPER, (uint32_t __user *)buffer);
}
return 0;
}
2.9 readStrongBinder
[-> Parcel.cpp]
sp Parcel::readStrongBinder() const
{
sp val;
//【见小节2.9.1】
unflatten_binder(ProcessState::self(), *this, &val);
return val;
}
2.9.1 unflatten_binder
[-> Parcel.cpp]
status_t unflatten_binder(const sp& proc, const Parcel& in, sp* out ) {
const flat_binder_object* flat = in.readObject(false);
if (flat) {
switch (flat->type) {
case BINDER_TYPE_BINDER:
// 当请求服务的进程与服务属于同一进程
*out = reinterpret_cast(flat->cookie);
return finish_unflatten_binder(NULL, *flat, in);
case BINDER_TYPE_HANDLE:
//请求服务的进程与服务属于不同进程【见2.9.2】
*out = proc->getStrongProxyForHandle(flat->handle);
//创建BpBinder对象
return finish_unflatten_binder(
static_cast(out->get()), *flat, in);
}
}
return BAD_TYPE;
}
2.9.2 getStrongProxyForHandle
[-> ProcessState.cpp]
sp ProcessState::getStrongProxyForHandle(int32_t handle)
{
sp result;
AutoMutex _l(mLock);
//查找handle对应的资源项[2.9.3]
handle_entry* e = lookupHandleLocked(handle);
if (e != NULL) {
IBinder* b = e->binder;
if (b == NULL || !e->refs->attemptIncWeak(this)) {
...
//当handle值所对应的IBinder不存在或弱引用无效时,则创建BpBinder对象
b = new BpBinder(handle);
e->binder = b;
if (b) e->refs = b->getWeakRefs();
result = b;
} else {
result.force_set(b);
e->refs->decWeak(this);
}
}
return result;
}
readStrongBinder的功能是flat_binder_object解析并创建BpBinder对象.
2.9.3 lookupHandleLocked
ProcessState::handle_entry* ProcessState::lookupHandleLocked(int32_t handle)
{
const size_t N=mHandleToObject.size();
//当handle大于mHandleToObject的长度时,进入该分支
if (N <= (size_t)handle) {
handle_entry e;
e.binder = NULL;
e.refs = NULL;
//从mHandleToObject的第N个位置开始,插入(handle+1-N)个e到队列中
status_t err = mHandleToObject.insertAt(e, N, handle+1-N);
if (err < NO_ERROR) return NULL;
}
return &mHandleToObject.editItemAt(handle);
}
根据handle值来查找对应的handle_entry.
二. 总结
请求服务(getService)过程,就是向servicemanager进程查询指定服务,当执行binder_transaction()时,会区分请求服务所属进程情况。
- 当请求服务的进程与服务属于不同进程,则为请求服务所在进程创建binder_ref对象,指向服务进程中的binder_node;
- 最终readStrongBinder(),返回的是BpBinder对象;
- 当请求服务的进程与服务属于同一进程,则不再创建新对象,只是引用计数加1,并且修改type为BINDER_TYPE_BINDER或BINDER_TYPE_WEAK_BINDER。
- 最终readStrongBinder(),返回的是BBinder对象的真实子类;