条件随机场(CRF)的原理与实现
一、概率无向图模型
模型定义
又称马尔科夫随机场。设有联合概率分布P(Y),由无向图G=(V,E)表示,结点V表示随机变量,边E表示随机变量之间的依赖关系。如果P(Y)满足成对、局部或全局马尔科夫性,就此联合概率分布为概率无向图模型。
成对马尔科夫性
u和v是无向图G中任意两个没有边连接的结点,其他结点为O,成对马尔科尔性是指 Y O Y_O YO的条件下, Y u Y_u Yu和 Y v Y_v Yv是条件独立的,即
P ( Y u , Y v ∣ Y O ) = P ( Y u ∣ Y O ) P ( Y v ∣ Y O ) P(Y_u,Y_v|Y_O) = P(Y_u|Y_O)P(Y_v|Y_O) P(Yu,Yv∣YO)=P(Yu∣YO)P(Yv∣YO)
局部马尔科夫性
v是任意一个结点,W是与v存在边连接的所有节点,O是v和W以外的所有结点。局部马尔科夫性是指 Y W Y_W YW条件下, Y v Y_v Yv和 Y O Y_O YO是条件独立,即
P ( Y v , Y O ∣ Y W ) = P ( Y v ∣ Y W ) P ( Y O ∣ Y W ) P(Y_v,Y_O|Y_W) = P(Y_v|Y_W)P(Y_O|Y_W) P(Yv,YO∣YW)=P(Yv∣YW)P(YO∣YW)

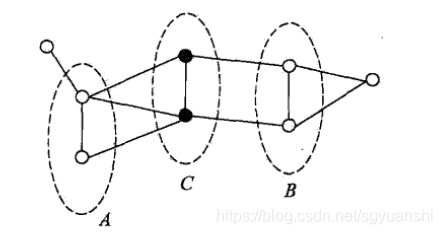
全局马尔科夫性
设结点集合A,B是被C分开的任意结点集合,全局马尔科夫性是指在 Y C Y_C YC的条件下, Y A Y_A YA和 Y B Y_B YB是条件独立,即
P ( Y A , Y B ∣ Y C ) = P ( Y A ∣ Y C ) P ( Y B ∣ Y C ) P(Y_A,Y_B|Y_C) = P(Y_A|Y_C)P(Y_B|Y_C) P(YA,YB∣YC)=P(YA∣YC)P(YB∣YC)
因子分解
团与最大团
无向图G中任何两个结点均有边连接的结点集合称为团。若一个团,不能再加进任何一个结点使其成为更大的团,则称为最大团。
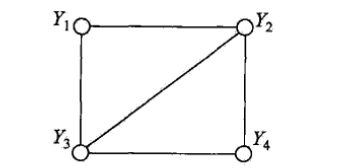
如 { Y 2 , Y 3 } \{Y_2, Y_3\} {Y2,Y3}为团, { Y 1 , Y 2 , Y 3 } \{Y_1, Y_2, Y_3\} {Y1,Y2,Y3}为最大团。
概率无向图的联合概率分布P(Y)可以表示为:
P ( Y ) = 1 Z ∏ C Ψ C ( Y C ) P(Y)=\frac{1}{Z}\prod_C\Psi_C(Y_C) P(Y)=Z1∏CΨC(YC)
Z = ∑ Y ∏ C Ψ c ( Y C ) Z=\sum_Y\prod_C\Psi_c(Y_C) Z=∑Y∏CΨc(YC)
其中,C为无向图的最大团, Y C Y_C YC为C的结点对应的随机变量, Ψ c ( Y C ) \Psi_c(Y_C) Ψc(YC)是C上定义的严格正函数。
二、条件随机场
**条件随机场:**设X与Y是随机变量,P(Y|X)是在给定X的条件下Y的条件概率分布。若Y构成一个由无向图G=(V,E)表示的马尔科夫随机场,即
P ( Y v ∣ X , Y w , w ≠ v ) = P ( Y v ∣ X , Y w , w ∼ v ) P(Y_v|X,Y_w,w\ne v)=P(Y_v|X,Y_w,w\sim v) P(Yv∣X,Yw,w=v)=P(Yv∣X,Yw,w∼v)
w ≠ v w\ne v w=v表示与结点v存在边连接的所有结点w, w ∼ v w\sim v w∼v表示结点v以外的所有结点
**线性链条件随机场:**设X和Y均为线性链表示的随机变量序列,P(Y|X)构成条件随机场,即满足马尔科夫性
P ( Y i ∣ X , Y 1 , . . . , Y i − 1 , Y i + 1 , Y n ) = P ( Y i ∣ X , Y i − 1 , Y i + 1 ) P(Y_i|X,Y_1,...,Y_{i-1},Y_{i+1},Y_n)=P(Y_i|X,Y_{i-1},Y_{i+1}) P(Yi∣X,Y1,...,Yi−1,Yi+1,Yn)=P(Yi∣X,Yi−1,Yi+1)
i = 1 , 2 , . . . , n i=1,2,...,n i=1,2,...,n
在标注问题中,X表示输入观测序列,Y表示对应的输出标记序列或状态序列。

参数化形式
设P(Y|X)为线性链条件随机场,则:
P ( y ∣ x ) = 1 Z ( x ) e x p ( ∑ i , k λ k t k ( y i − 1 , y i , x , i ) + ∑ i , l μ l s l ( y i , x , i ) ) P(y|x)=\frac{1}{Z(x)}exp(\sum_{i,k}\lambda_kt_k(y_{i-1},y_i,x,i)+\sum_{i,l}\mu_ls_l(y_i,x,i)) P(y∣x)=Z(x)1exp(∑i,kλktk(yi−1,yi,x,i)+∑i,lμlsl(yi,x,i))
Z ( x ) = ∑ y e x p ( ∑ i , k λ k t k ( y i − 1 , y i , x , i ) + ∑ i , l μ l s l ( y i , x , i ) ) Z(x)=\sum_yexp(\sum_{i,k}\lambda_kt_k(y_{i-1},y_i,x,i)+\sum_{i,l}\mu_ls_l(y_i,x,i)) Z(x)=∑yexp(∑i,kλktk(yi−1,yi,x,i)+∑i,lμlsl(yi,x,i))
其中, t k t_k tk和 s l s_l sl是特征函数,通常取值为1或0。 λ k \lambda_k λk和 μ l \mu_l μl是对应的权值,Z(x)是规范化因子。
t k t_k tk可以理解为定义在边上的特征函数:转移特征,与当前位置和前一个位置有关。
s l s_l sl是定义在结点上的特征函数:状态特征,只与当前位置有关。


简化形式
设有 K 1 K_1 K1个转移特征, K 2 K_2 K2个状态特征, K = K 1 + K 2 K=K_1+K_2 K=K1+K2,记
f k ( y i − 1 , y i , x , i ) = { t k ( y i − 1 , y i , x , i ) s l ( y i , x , i ) f_k(y_{i-1},y_i,x,i)= \left\{ \begin{aligned} %请使用'aligned'或'align*' & t_k(y_{i-1},y_i,x,i) \\ %加'&'指定对齐位置 & s_l(y_i,x,i) \end{aligned} \right. fk(yi−1,yi,x,i)={tk(yi−1,yi,x,i)sl(yi,x,i)
对各个位置i求和,记作
f k ( y , x ) = ∑ i = 1 n f k ( y i − 1 , y i , x , i ) , k = 1 , 2 , . . . , K f_k(y,x)=\sum_{i=1}^nf_k(y_{i-1},y_i,x,i), k=1,2,...,K fk(y,x)=∑i=1nfk(yi−1,yi,x,i),k=1,2,...,K
用 w k w_k wk表示特征 f k ( y , x ) f_k(y,x) fk(y,x)的权值,
w k = { λ k , k = 1 , 2 , . . . , K 1 μ l , k = K 1 + l ; l = 1 , 2 , . . . , K 2 w_k=\begin{cases} \lambda_k, k=1,2,...,K_1 \\ \mu_l,k=K_1+l;l=1,2,...,K_2 \end{cases} wk={λk,k=1,2,...,K1μl,k=K1+l;l=1,2,...,K2
于是,上述的条件随机场可表示为:
P ( y ∣ x ) = 1 Z ( x ) e x p ∑ k = 1 K w k f k ( y , x ) P(y|x)=\frac{1}{Z(x)}exp\sum_{k=1}^Kw_kf_k(y,x) P(y∣x)=Z(x)1exp∑k=1Kwkfk(y,x)
Z ( x ) = ∑ y e x p ∑ k = 1 K w k f k ( y , x ) Z(x)=\sum_yexp\sum_{k=1}^Kw_kf_k(y,x) Z(x)=∑yexp∑k=1Kwkfk(y,x)
若以w表示权值向量,即
w = ( w 1 , w 2 , . . . , w k ) T w=(w_1,w_2,...,w_k)^T w=(w1,w2,...,wk)T
以F(y,x)表示全局特征向量,即
F ( y , x ) = ( f 1 ( y , x ) , f 2 ( y , x ) , . . . , f k ( y , x ) ) T F(y,x)=(f_1(y,x),f_2(y,x),...,f_k(y,x))^T F(y,x)=(f1(y,x),f2(y,x),...,fk(y,x))T
那么,条件随机场又可以写成w与F(y,x)內积的形式:
P w ( y ∣ x ) = e x p ( w ∗ F ( y , x ) ) Z w ( x ) P_w(y|x)=\frac{exp(w*F(y,x))}{Z_w(x)} Pw(y∣x)=Zw(x)exp(w∗F(y,x))
三、RNN/LSTM下的条件随机场
根据上述条件随机场的定义,其实我们可以将条件随机场拆分为两部分,一部分就是转移特征函数:即 f ( y i − 1 , y i , x , i ) f(y_{i-1}, y_i, x, i) f(yi−1,yi,x,i),每个时刻状态之间的转移关系,另一部分为 f ( y i , x , i ) f(y_i, x, i) f(yi,x,i),即每个时刻观测序列x与状态y之间的关系。
那么,条件随机场可以简化为:
P ( y ∣ x ) = 1 Z ( x ) e x p ( h ( y 1 ; x ) + h ( y 2 ; x ) + g ( y 1 , y 2 ; x ) + . . . . + h ( y n ; x ) + g ( y n − 1 , y n ; x ) ) P(y|x) = \frac{1}{Z(x)}exp(h(y_1;x) + h(y_2;x)+g(y_1,y_2;x)+....+h(y_n;x)+g(y_{n-1},y_n;x)) P(y∣x)=Z(x)1exp(h(y1;x)+h(y2;x)+g(y1,y2;x)+....+h(yn;x)+g(yn−1,yn;x))
再接着,我们将观测序列x与状态y之间的关系交由RNN/LSTM去拟合,并且认为RNN/LSTM已经充分捕捉y与x之间的联系,因此,我们假定函数g与x无关,即
P ( y ∣ x ) = 1 Z ( x ) e x p ( h ( y 1 ; x ) + h ( y 2 ; x ) + g ( y 1 , y 2 ) + . . . . + h ( y n ; x ) + g ( y n − 1 , y n ) ) P(y|x) = \frac{1}{Z(x)}exp(h(y_1;x) + h(y_2;x)+g(y_1,y_2)+....+h(y_n;x)+g(y_{n-1},y_n)) P(y∣x)=Z(x)1exp(h(y1;x)+h(y2;x)+g(y1,y2)+....+h(yn;x)+g(yn−1,yn))
到这里就比较简单了,
h ( y t ; x ) h(y_t;x) h(yt;x)就是RNN网络在时刻t下状态为 y t y_t yt的概率得分;
g其实就是转移矩阵了, g ( y n − 1 , y n ) g(y_{n-1},y_n) g(yn−1,yn)就是 y n − 1 y_{n-1} yn−1转移到 y n y_n yn概率。
模型训练
模型的参数包括RNN/LSTM的网络参数、转移概率矩阵参数。
求导、梯度下降等工作,我们可以交给tensorflow来处理,但首先,我们需要得到loss。
使用最大似然法进行训练,训练的目标就是最大化P(y|x)。因为它是包含自然数指数的,所以我们对其取对数,然后取相反数,变为最小化的最优化问题:
− l o g P ( y ∣ x ) = − ( h ( y 1 ; x ) + ∑ k = 1 n − 1 [ g ( y k , y k + 1 ) + h ( y ( k + 1 ) ; x ) ] ) + l o g Z ( x ) -logP(y|x) = -\left (h(y_1;x) + \sum^{n-1}_{k=1}[g(y_k,y_{k+1}) + h(y_(k+1);x)] \right) + logZ(x) −logP(y∣x)=−(h(y1;x)+∑k=1n−1[g(yk,yk+1)+h(y(k+1);x)])+logZ(x)
归一化因子
最麻烦的还是这个归一化因子Z(x),需要对所有路径进行指数求和。
假设我们状态y的取值有k种,那么就有k^n的量级,我们利用动态规划的思想进行递归,计算完时刻t的时候,将其存起来,直接用于时刻t+1。
首先,我们将 Z t Z_t Zt分为k个部分:
Z t = Z t ( 1 ) + Z t ( 2 ) + . . . . + Z t ( k ) Z_t = Z_t^{(1)} + Z_t^{(2)} + .... + Z_t^{(k)} Zt=Zt(1)+Zt(2)+....+Zt(k)
Z t ( 1 ) , Z t ( 2 ) , . . . . , Z t ( k ) Z_t^{(1)},Z_t^{(2)} , .... ,Z_t^{(k)} Zt(1),Zt(2),....,Zt(k)是截止到时刻t,以状态(标签)1,…,k为终点的所有路径的得分指数和,
Z t + 1 ( 1 ) = ( Z t ( 1 ) G 11 + Z t ( 2 ) G 21 + . . . . + Z t ( k ) G k 1 ) H t + 1 ( 1 ; x ) Z_{t+1}^{(1)}=\left(Z_t^{(1)}G_{11} + Z_t^{(2)}G_{21} + .... + Z_t^{(k)}G_{k1}\right)H_{t+1}(1;x) Zt+1(1)=(Zt(1)G11+Zt(2)G21+....+Zt(k)Gk1)Ht+1(1;x)
Z t + 1 ( 2 ) = ( Z t ( 1 ) G 12 + Z t ( 2 ) G 22 + . . . . + Z t ( k ) G k 2 ) H t + 1 ( 2 ; x ) Z_{t+1}^{(2)}=\left(Z_t^{(1)}G_{12} + Z_t^{(2)}G_{22} + .... + Z_t^{(k)}G_{k2}\right)H_{t+1}(2;x) Zt+1(2)=(Zt(1)G12+Zt(2)G22+....+Zt(k)Gk2)Ht+1(2;x)
…
Z t + 1 ( k ) = ( Z t ( 1 ) G 1 k + Z t ( 2 ) G 2 k + . . . . + Z t ( k ) G k k ) H t + 1 ( k ; x ) Z_{t+1}^{(k)}=\left(Z_t^{(1)}G_{1k} + Z_t^{(2)}G_{2k} + .... + Z_t^{(k)}G_{kk}\right)H_{t+1}(k;x) Zt+1(k)=(Zt(1)G1k+Zt(2)G2k+....+Zt(k)Gkk)Ht+1(k;x)
以矩阵的形式表示为:
Z t + 1 = Z t G ∗ H ( y t + 1 ; x ) Z_{t+1}=Z_tG*H(y_{t+1};x) Zt+1=ZtG∗H(yt+1;x)
因为根据条件随机场的定理, 分布式指数分布的,所以在归一化因子中的计算也都是需要带上指数的。
G即为g的指数,H即为h的指数。
四、代码实现
import tensorflow as tf
import numpy as np
from tensorflow.contrib.crf import crf_log_likelihood
class BiLstmCrf:
def crf_log_likelihood(self,
inputs,
tag_indices,
sequence_lengths,
transition_params=None):
"""Computes the log-likelihood of tag sequences in a CRF.
Args:
inputs: A [batch_size, max_seq_len, num_tags] tensor of unary potentials
to use as input to the CRF layer.
tag_indices: A [batch_size, max_seq_len] matrix of tag indices for which we
compute the log-likelihood.
sequence_lengths: A [batch_size] vector of true sequence lengths.
transition_params: A [num_tags, num_tags] transition matrix, if available.
Returns:
log_likelihood: A [batch_size] `Tensor` containing the log-likelihood of
each example, given the sequence of tag indices.
transition_params: A [num_tags, num_tags] transition matrix. This is either
provided by the caller or created in this function.
"""
max_seq_len = inputs.get_shape().as_list()[1]
num_tags = inputs.get_shape().as_list()[2]
# LSTM的发射矩阵的累计得分
mask = tf.sequence_mask(sequence_lengths, max_seq_len, dtype=tf.float32)
inputs = inputs * tf.expand_dims(mask, axis=-1)
sequence_score = inputs * tf.one_hot(tag_indices, depth=num_tags, dtype=tf.float32)
sequence_score = tf.reduce_sum(tf.reduce_sum(sequence_score, axis=-1), axis=-1)
# 转移概率累计得分
transition_score = tf.gather(transition_params, axis=0, indices=tag_indices[:, :-1]) * tf.expand_dims(
mask[:, 1:], axis=-1) * tf.one_hot(tag_indices[:, 1:], depth=num_tags, dtype=tf.float32)
transition_score = tf.reduce_sum(tf.reduce_sum(transition_score, axis=-1), axis=-1)
# 归一化因子计算
alpha = [inputs[:, 0, n:(n + 1)] for n in range(num_tags)] # [batch_size, num_tags]
for t in range(1, max_seq_len):
temp = alpha.copy()
for n in range(num_tags):
alpha[n] = tf.where(tf.equal(mask[:, t:(t + 1)], 1), tf.reduce_logsumexp(
tf.concat(temp, axis=-1) + tf.transpose(transition_params[:, n:(n + 1)]), axis=-1,
keepdims=True) + inputs[:, t, n:(n + 1)], temp[n])
log_norm = tf.reduce_logsumexp(tf.concat(alpha, axis=-1), axis=-1)
return log_norm - (sequence_score + transition_score)
if __name__ == '__main__':
inputs_arr = np.random.random([20, 10, 5])
tag_indices_arr = np.random.randint(0, 5, [20, 10])
transition_params_arr = np.random.random([5, 5])
sequence_lengths_arr = np.random.randint(0, 10, [20])
inputs = tf.placeholder(tf.float32, [None, 10, 5])
tag_indices = tf.placeholder(tf.int64, [None, 10])
transition_params = tf.placeholder(tf.float32, [5, 5])
# sequence_lengths = np.full([100], 10)
sequence_lengths = tf.placeholder(tf.int64, [None])
sess = tf.Session()
crf = BiLstmCrf()
res1 = crf.crf_log_likelihood(inputs,
tag_indices,
sequence_lengths,
transition_params)
# tensorflow自带的crf函数
res2 = crf_log_likelihood(inputs,
tag_indices,
sequence_lengths,
transition_params)
feed_dict = {inputs: inputs_arr, tag_indices: tag_indices_arr, sequence_lengths: sequence_lengths_arr,
transition_params: transition_params_arr}
print(sess.run(res1, feed_dict=feed_dict))
print(sess.run(res2, feed_dict=feed_dict))
tensorflow迭代计算
在归一化因子的迭代计算时,其实可以用tensorflow中的rnn相关的api来代替
因子RNN其实一直在迭代计算 h t + 1 = f ( h t , x ) h_{t+1} = f(h_t, x) ht+1=f(ht,x)
(里面的array_os、math_os是tensorflow下的api,与正常的tf用法基本一致)
# Split up the first and rest of the inputs in preparation for the forward
# algorithm.
first_input = array_ops.slice(inputs, [0, 0, 0], [-1, 1, -1])
first_input = array_ops.squeeze(first_input, [1])
"""Forward computation of alpha values."""
rest_of_input = array_ops.slice(inputs, [0, 1, 0], [-1, -1, -1])
# Compute the alpha values in the forward algorithm in order to get the
# partition function.
forward_cell = CrfForwardRnnCell(transition_params)
# Sequence length is not allowed to be less than zero.
sequence_lengths_less_one = math_ops.maximum(
constant_op.constant(0, dtype=sequence_lengths.dtype),
sequence_lengths - 1)
_, alphas = rnn.dynamic_rnn(
cell=forward_cell,
inputs=rest_of_input,
sequence_length=sequence_lengths_less_one,
initial_state=first_input,
dtype=dtypes.float32)
log_norm = math_ops.reduce_logsumexp(alphas, [1])
# Mask `log_norm` of the sequences with length <= zero.
log_norm = array_ops.where(math_ops.less_equal(sequence_lengths, 0),
array_ops.zeros_like(log_norm),
log_norm)
class CrfForwardRnnCell(rnn_cell.RNNCell):
"""Computes the alpha values in a linear-chain CRF.
See http://www.cs.columbia.edu/~mcollins/fb.pdf for reference.
"""
def __init__(self, transition_params):
"""Initialize the CrfForwardRnnCell.
Args:
transition_params: A [num_tags, num_tags] matrix of binary potentials.
This matrix is expanded into a [1, num_tags, num_tags] in preparation
for the broadcast summation occurring within the cell.
"""
self._transition_params = array_ops.expand_dims(transition_params, 0)
self._num_tags = transition_params.get_shape()[0].value
@property
def state_size(self):
return self._num_tags
@property
def output_size(self):
return self._num_tags
def __call__(self, inputs, state, scope=None):
"""Build the CrfForwardRnnCell.
Args:
inputs: A [batch_size, num_tags] matrix of unary potentials.
state: A [batch_size, num_tags] matrix containing the previous alpha
values.
scope: Unused variable scope of this cell.
Returns:
new_alphas, new_alphas: A pair of [batch_size, num_tags] matrices
values containing the new alpha values.
"""
state = array_ops.expand_dims(state, 2)
# This addition op broadcasts self._transitions_params along the zeroth
# dimension and state along the second dimension. This performs the
# multiplication of previous alpha values and the current binary potentials
# in log space.
transition_scores = state + self._transition_params
new_alphas = inputs + math_ops.reduce_logsumexp(transition_scores, [1])
# Both the state and the output of this RNN cell contain the alphas values.
# The output value is currently unused and simply satisfies the RNN API.
# This could be useful in the future if we need to compute marginal
# probabilities, which would require the accumulated alpha values at every
# time step.
return new_alphas, new_alphas
五、模型预测
维特比(Viterbi)算法