雷达导论PART III.2 2020-03-27
今天开始第三篇第8章-指向性和天线波束。
本章目录如下。
8. 指向性和天线波束
8.1辐射能量的角度分布
8.2辐射图特征
8.2.1波束宽度
8.2.2天线增益
8.2.3旁瓣
8.2.4减少旁瓣
8.3 电波束扫描
8.4角分辨率
8.5角度测量
8.5.1波瓣扫描
8.5.2单脉冲
8.6用于地面测绘的天线波束
8.7总结
如果你能看到雷达发出的波的话,它的形状大致是这样的:

沿发射中轴线横切,刨面长这样:
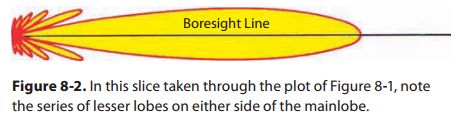
中间这条大的是我们想要的雷达波,旁边长的像花瓣一样的波,我们把它叫旁瓣,是不是很直接。。为什么波是一瓣一瓣的呢?这里放两张图,随着θ的变化,向量的和的幅值呈辛克函数变化。


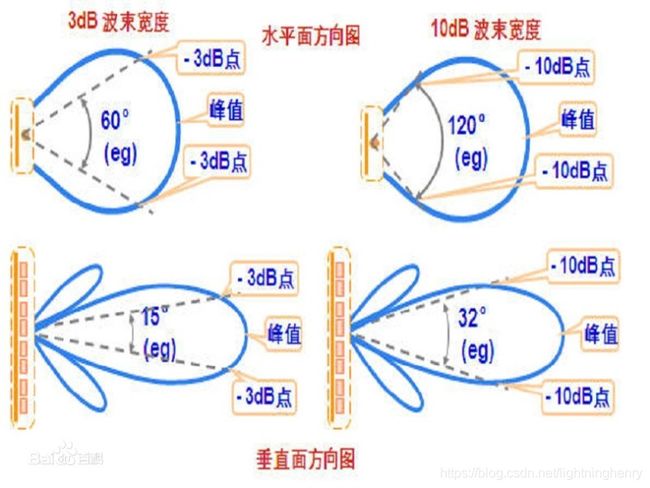
将主瓣单独摘出来,引出一个重要的概念——3dB波束宽度。注意3dB波束宽度它是个角度哈,它又叫半功率角,单位是弧度。定义如图8-11。

我感觉图8-11画的不够明确,再给大家放张图,这个是扇形波束的。
主瓣张角:

如果是线阵天线或者矩阵天线,3dB波束宽度为:
如果是均匀辐射的圆形阵天线,3dB波束宽度为:
如果天线使用锥状辐射抑制了旁瓣,则

=====================================================================
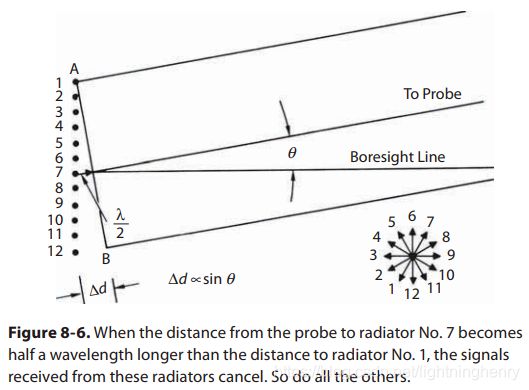
接着引入电扫雷达,也就是相控阵雷达的概念,相控阵雷达的原理和图8-6中的原理是一样的,每个辐射单元的相位可调整,通过调整每个辐射单元的相位使空间中某个方向的相位一致,得到最大增益,从而实现波束角度的调整。相控阵雷达比机扫雷达的优点多很多,大家可以自行百度。这里说下相控阵不如机扫雷达的一个地方,如下图所示。
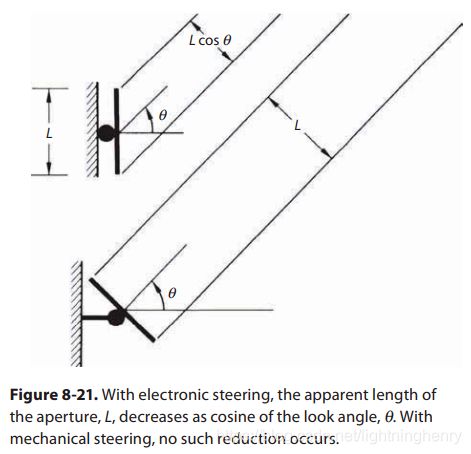
上面的是相控阵天线,下面的是机扫天线,可以明显的看出当θ角过大时,相控阵天线的增益明显小于机扫天线。一半来说,平面阵的扫描角度范围不超过-60~60°,共性阵可以大一些,我知道的能达到-150~150°。
=====================================================================
对雷达波的扫描范围来一个直观的认识,假设波束宽度是3°,这是一个比较窄的波束了,当目标距离为50公里时,雷达波顺时的照射范围是多大。我们来算一下。
把R=50km代入可得,L=2.61km,所以对于军用雷达来说,绝大部分目标都是点目标。如果是车载雷达,目标距离为50米时,L=2.61m,勉强能区分出车辆。这里有一点要注意,在进行雷达系统设计的时候,目标一定要位于图8-11中-3dB线的左侧。
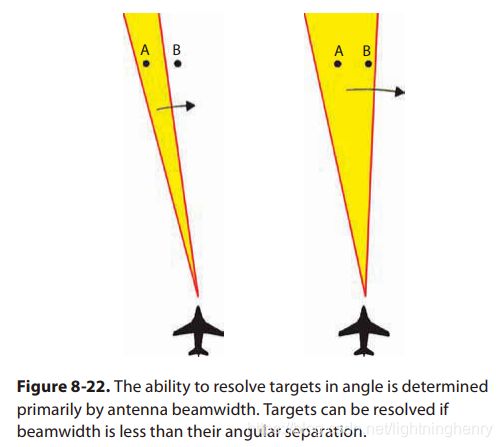
图8-22中,雷达波从左往右扫描,左侧雷达波束比较窄时,A和B不会同时处于雷达波的照射中,可以容易的区分出是两个目标,右侧雷达波束变宽,A、B同时处于雷达波的照射中就不好区分了。
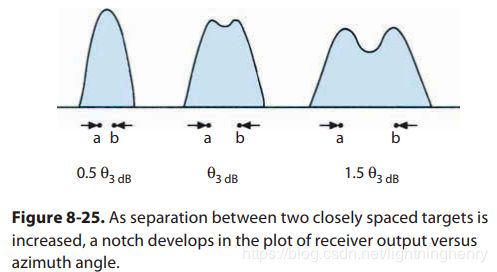
图8-25中,雷达波束宽度不变,目标a和b的距离逐渐增大,当a和b间隔1.5倍,3dB波束宽度时,目标a和b可以区分开来,所以雷达的角分辨率可以用3dB波束宽度来衡量。当然随着技术的进步,雷达现在的角分辨率肯定小于3dB波束宽度。
=====================================================================
最后讲一下角跟踪的方法。这里大家可能会疑惑怎么会有跟踪的概念呢?雷达跟踪目标是怎么回事呢,和导弹跟踪目标是一回事吗?
雷达跟踪—使雷达波束的中心始终照射于目标,随目标的移动来改变波束的照射角度。所以雷达跟踪是雷达寻的制导武器实现跟踪的前提,特别是末制导的时候。当然,有很多雷达是不具备跟踪功能的,比如地基的搜索雷达,它就一直在哪里匀速的扫。这种早期的扫描式雷达的测角精度就真的受限于3dB波束宽度了。雷达在进入跟踪阶段之前还有两个阶段,分别是扫描和截获阶段。雷达先按照一定的规律大范围扫描,扫到目标后进行确认,最后转入跟踪阶段。雷达能持续跟踪目标靠的就是角跟踪。在角跟踪阶段,测角精度很高。
角跟踪的原理简单来说,就如图8-26,当目标处于瞄准线(bore sight line)时,误差为0,当偏离以后误差不为0,根据误差值的大小和正负调整波束指向就可实现角跟踪。注意波瓣的相交点位于-3dB线。

单脉冲角跟踪就是一种角误差回路跟踪系统。早期雷达角跟踪使用顺序波瓣法或者是圆锥扫描法,目前极少用了,用的最多的是单脉冲测角法。所以这里就只讲单脉冲测角。那什么是单脉冲测角呢?
单脉冲测角是指雷达在一个脉冲周期内就将目标的角度测算出来。这个是相对于早期的顺序波瓣法和圆锥扫描法来说的,早期的雷达要很多个脉冲周期才能将目标角度测出。
单脉冲测角又分为比幅单脉冲和比相单脉冲,比幅单脉冲同时发射4束波,比相单脉冲需要至少具有两个接收单元。具体的原理请参考陈伯孝老师的《现代雷达系统分析与设计》的351-359页。这里我就不多赘言了,《机载雷达导论》关于这部分内容也讲的比较粗略。
好了,本章的扩展阅读和问题如下:
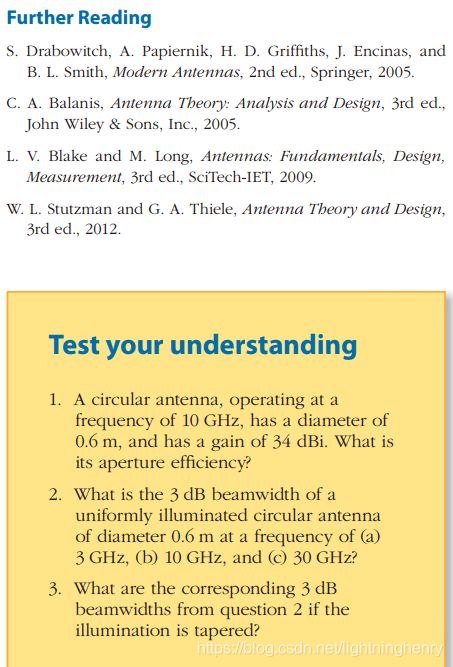
1. 一种频率为10GHz的圆形天线,其直径为0.6m,增益34dBi。它的孔径效率η是多少?
答:增益G=10^(3.4)=2512,根据公式
A为天线面积,可计算得到η=63.6%。
2. 直径0.6米,频率分别为(a)(b)(c)的均匀照明圆形天线的3dB波束宽度是多少? (a)3GHz; (b)10GHz; (c)30GHz
答:代入公式:
3dB波束宽度分别为:0.17rad、0.051rad、0.017rad。
3.如果辐射是锥形的,问题2中相应的3dB波束宽度是多少?
答:代入公式:
3dB波束宽度分别为:0.208rad、0.0625rad、0.021rad。


这章内容很多,需要大家慢慢消化,我们下期再见。