雷达导论PART-III.3 2020-04-11
今天开始第9章-电子扫描阵列天线。由于CSDN上的读者大部分是计算机或者软件专业背景,雷达的博客在CSDN受众比较小,所以决定以后的文章将同步更新到知乎专栏:
https://zhuanlan.zhihu.com/c_1228367230388944896
本章目录如下。
9. 电子扫描阵列天线
9.1基本概念
9.2 ESAs类型
9.2.1无源ESA
9.2.2有源ESA
9.3宽带雷达的时间延迟
9.4无源ESAs和有源ESAs的共同优点
9.4.1有利于减少RCS
9.4.2波束高度敏捷
9.4.3高可靠性
9.5有源ESA的其他优点
9.6关键的限制和它们的规避
9.6.1获得大范围的视场
9.6.2波束稳定
9.7未来趋势—数字波束形成
9.7.1数字波束形成的优势
9.7.2数字波束形成的挑战
9.8总结
电子扫描阵列雷达(Electronically Scanned Array Radar, ESAR)和相控阵雷达(Phased Array Radar, PAR)这里可以简单的划等号。
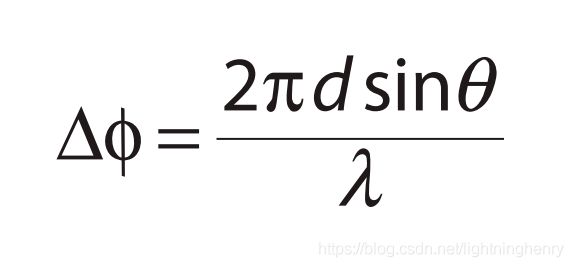
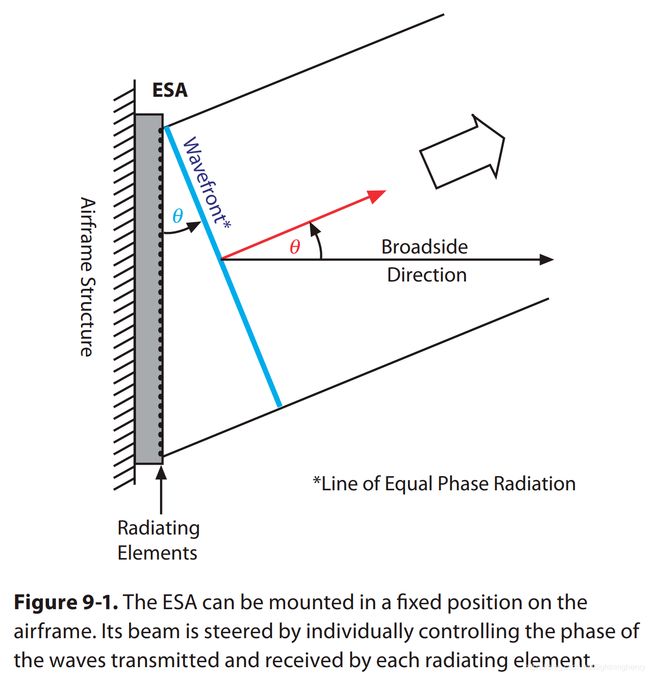
首先来理解一个基本公式,这个公式就是空间相位变化的原理,一定要理解,可结合图9-1理解。如果理解不了可能就无法继续了,你将无缘相控阵。
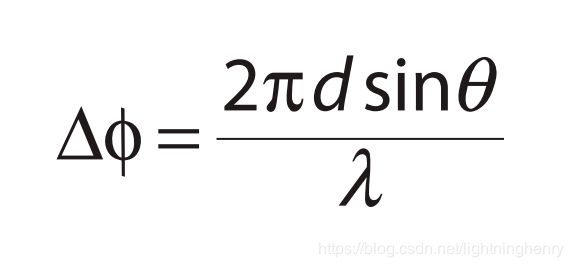
式中,ΔΦ为相位差,d为天线阵元的间距,θ为波束方向角,λ为波长。
知道了原理以后,看看相控阵雷达是怎么扫描的,如下图所示。
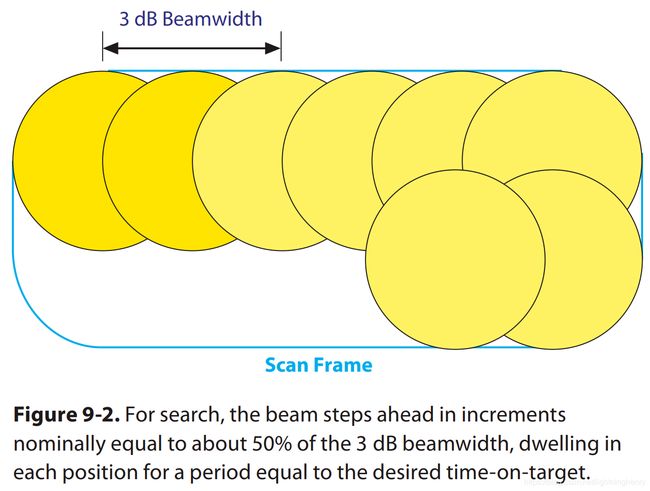
雷达波每次步进半个3dB波束宽度,然后停留一下,再继续步进。常用的扫描轨迹如图9-2,先从左往右,然后向下步进一次,接着再往左。循环往复,直至把这一区域全部扫描完毕。
相控阵雷达分为有源相控阵和无源相控阵两种。
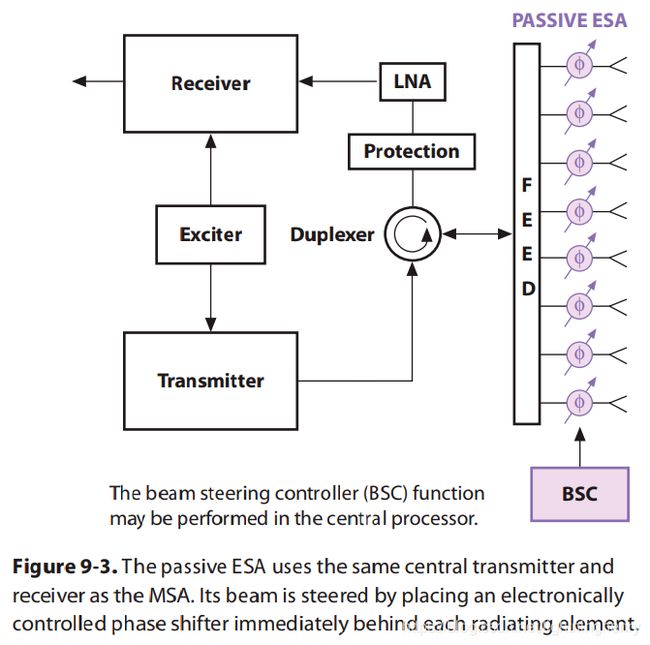
无源ESA比有源ESA的简单,如图9-3所示,它和机扫雷达的架构类似,只是在每个天线阵元后面加了移相器,然后增加了波控器(Beam Steering Controller, BSC),波控器的核心一般是一片FPGA,因为它要控制很多个移相器,需要很多管脚。波控器接收来自中央处理机的指示,进行解码然后控制每个移相器移相。目前很多相控阵雷达都是这种架构。
讲到这里,细心的朋友可能注意到了,无源相控阵的翻译是passive ESA,为什么passive翻译成无源呢?passive直译的话不应当是被动的或者消极的吗?怎么是无源呢?我目前还没有查到这一翻译的起源,这里说说我的看法。
首先我认为叫无源相控阵更好。然后passive不一定是翻译成无源的,无源相控阵这一叫法可能是我们中国人自己想的,也有可能是翻译的前苏联的。英语国家的人把它叫做passive ESA,中国人把它叫做无源相控阵,是从不同的角度去取的名字。叫passive ESA,是因为相控阵自己不会产生雷达波,需要一个发射机来驱动它,它被动的接收发射机的能量。叫无源相控阵,是因为它里面都是无源器件,不需要单独给它供电源。叫无源相控阵雷达,可以与被动雷达进行区分,不会导致概念混淆。
同理,有源相控阵里面有有源器件,可以主动发射和接收雷达波,不需要外部供能。如下图所示。
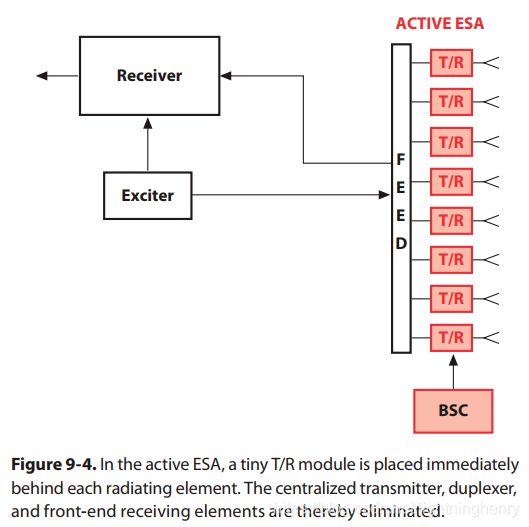
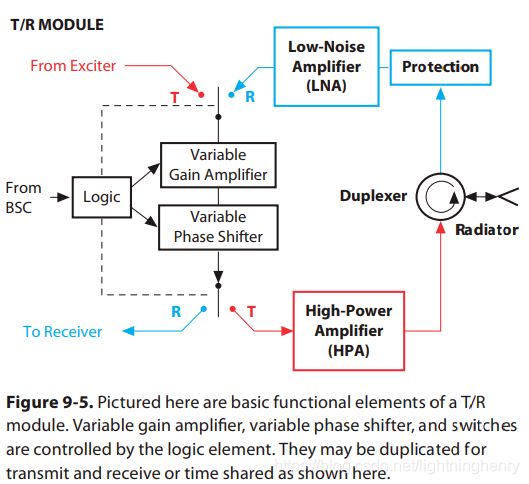
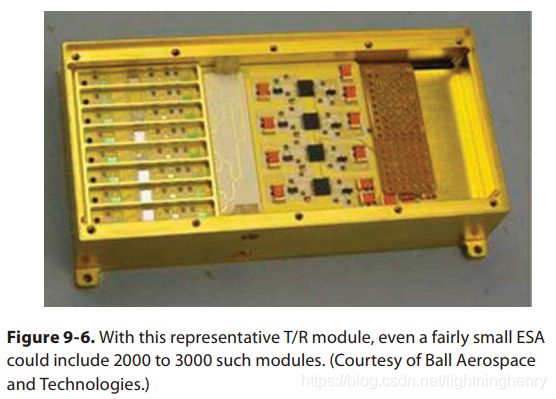
对比图9-4和9-3可以明显的发现,有源相控阵结构变简单了,但是实际上实现起来要复杂的多,主要是在图中的T/R组件上,每一个都造价不菲,而且一个相控阵往往需要成百上千个T/R组件。T/R组件的内部结构如下图所示。
T/R组件的实物图如下图所示。这是个大T/R,包含了8个小T/R。
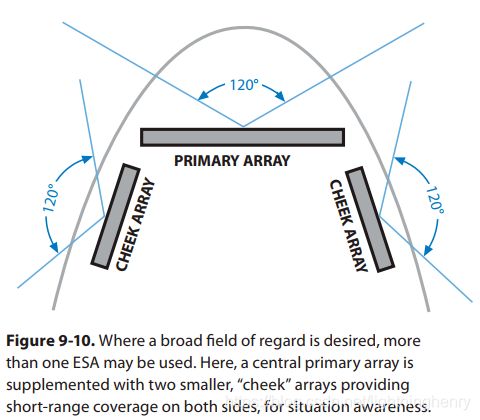
相控阵相对与机扫的缺点上一篇文章提到了一点,那就是视场受限,如果非要大范围的视场怎么办呢?看下图
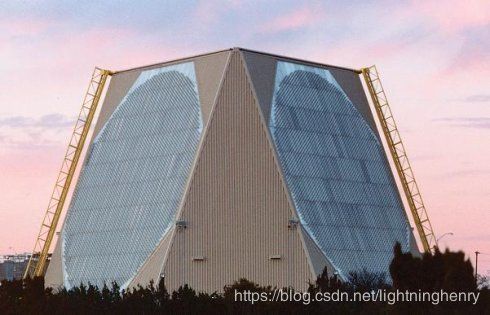
再看美国的铺路爪。
另外在机载和弹载雷达方面,相控阵雷达还有一个缺陷,那就是波束稳定,飞机和导弹的姿态是不断变化的呀。。机扫雷达可以根据飞机或者导弹的姿态,通过伺服系统来调整天线稳定指向目标。相控阵雷达没有伺服系统,必须根据导弹姿态实时控制波束指向,才能稳定波束指向。这需要大量的计算和超快的处理速度,幸运的是现在的处理器能够胜任。但是成本会高,你懂的,T/R组件已经很贵了。。看到这里你就明白相控阵雷达的钱烧在哪里了。
================================================================================================
最后讲一下目前比较火热的一项技术——数字波束合成。
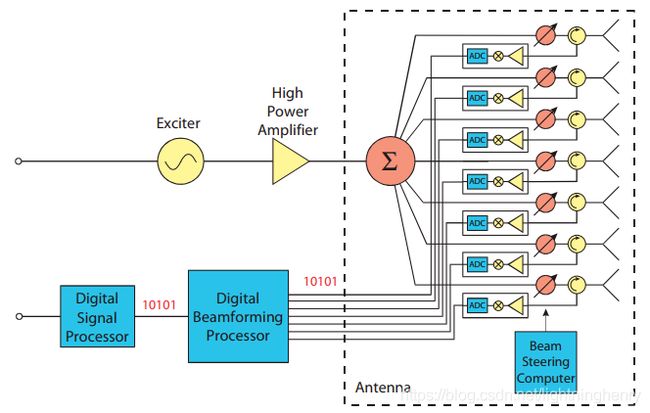
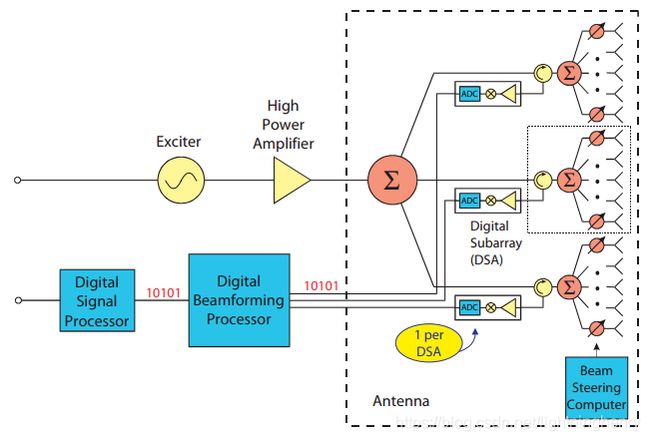
使用数字波束合成的ESA,叫做DESA。如图9-4,传统的波束合成是用的模拟手段,将接收到的多通道射频模拟信号合成和、差、差三路射频模拟信号。数字波束合成在每个接收通道后加了射频直采ADC,对数字信号进行合成,如下图所示。
 、
、
但是相控阵的通道数太多,射频ADC的价格是很高的,所以目前工程上的结构是长这样的(下图),将相控阵的几千个阵元划分为几个数字子阵来进行处理。
数字波束形成有很多好处。
首先,可以使用同一组数字化信号形成多个同步接收波束。多波束的形成使搜索给定区域的速度更快,并为附加的处理技术提供了机会,如最大似然估计(MLE)代替传统的单脉冲进行更精确的角度估计。DBF提供了一个利用数字时延来克服与移相器相关的误指向的机会。
此外,由于振幅和相位(或时间)权重是数字应用的,它们比模拟方法的误差更小,而模拟方法的精度更低,而且容易受到温度波动的影响。对于更宽的带宽,需要的是真正的时间延迟,而不是相移。
最后,数字通道可以取消或抑制干扰源。随着数字信道数量的增加,可以消除的干扰源数量也随之增加。这可以通过干涉器的先验知识或更复杂的自适应阵列处理技术来实现。对于机载系统,DBF是空时自适应处理(STAP)的支持架构,将在第26章中讨论。
数字波束形成要实现起来也有喝多挑战。第一个就是成本,射频直采ADC的价格很高,而且需用量很大。另外,数字子阵中还要集成别的器件,每个子阵的空间都很小,要做到小型化高度集成很难。还有就是散热,集成的东西多,功耗就大,体积却很小,长时间工作散热也是个问题。
================================================================================================
好了,本章的扩展阅读和问题如下:
1.相控阵的三大优势是什么?
答:见9.4节的子标题
2。阐述有源相控阵和无源相控阵的本质区别。
答:见上文阐述。
3.列出数字波束形成的主要优势和主要挑战。
答:见上文阐述。
4.假设一个相控阵的阵元间距为半波长。电扫波束到45度时所需的元素到元素相移是多少?
答:将d=λ/2,θ=45°代入下式,可得ΔΦ=127.28°