Python--学习笔记
文章目录
- Python包管理工具--PIP安装使用
- 模块/包
- glob 模块
- scipy 模块
- scipy.ndimage.zoom
- scipy.sparse.csr_matrix scipy.sparse.csc_matrix
- numpy模块
- np.flip
- np.argmax
- np.max
- np.ndarrary.strides
- np.lib.stride_tricks.as_strided
- np.ravel np.flatten np.squeeze
- np.stack
- np.tile
- np.linalg.norm
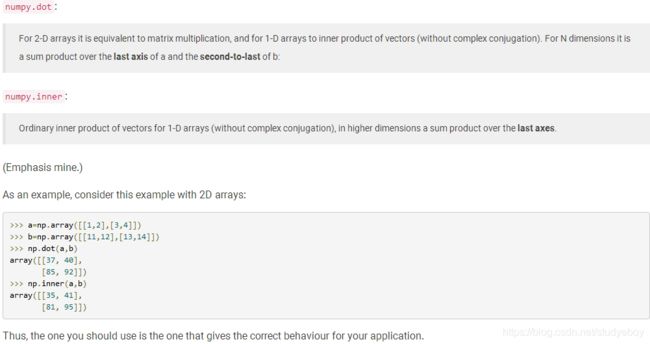
- np.inner
- np.dot
- np.inner和np.dot区别
- np.einsum
- scikit-image
- 内建模块
- deque
- PrettyTable 模块
- 安装
- 导入
- ctypes模块
- PIL
- 内置函数
- isinstance()
- 问题
- '\u'错误
- 参考文献
Python包管理工具–PIP安装使用
wget https://bootstrap.pypa.io/get-pip.py
python get-pip.py --user
wget 命令会下载get-pip.py脚本到当前文件夹下,python get-pip.py会安装pip2 和pip3两个工具。
模块/包
glob 模块
在python中,glob模块是用来查找匹配的文件的
在查找的条件中,需要用到Unix shell中的匹配规则:
* : 匹配所所有
? : 匹配一个字符
*.* : 匹配如:[hello.txt,cat.xls,xxx234s.doc]
?.* : 匹配如:[1.txt,h.py]
?.gif: 匹配如:[x.gif,2.gif]
可以参考:fnmatch
如果没有匹配的,glob.glob(path)将返回一个空的list:[]
scipy 模块
SciPy是一个高级的科学计算库,SciPy一般都是操控NumPy数组来进行科学计算,SciPy有很多子模块可以应对不同的应用。
- scipy.cluster 向量计算 / Kmeans
- scipy.constants 物理和数学常量
- scipy.fftpack 傅里叶变换
- scipy.integrate 积分程序
- scipy.interpolate 插值
- scipy.io 数据输入和输出
- scipy.linalg 线性代数程序
- scipy.ndimage n-维图像包
- scipy.odr 正交距离回归
- scipy.optimize 优化
- scipy.signal 信号处理
- scipy.sparse 稀疏矩阵
- scipy.spatial 空间数据结构和算法
- scipy.special 一些特殊数学函数
- scipy.stats 统计
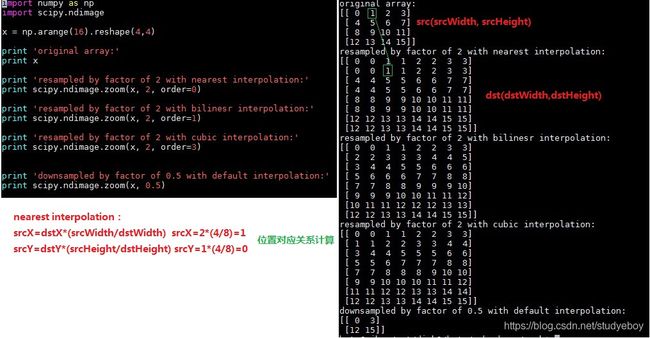
scipy.ndimage.zoom
ndimage子模块专用于图像处理。ndimage表示一个n维图像。
scipy.sparse.csr_matrix scipy.sparse.csc_matrix
csr:Compressed Sparse Row matrix
csc:Compressed Sparse Column matrix
>>> indptr = np.array([0, 2, 3, 6])
>>> indices = np.array([0, 2, 2, 0, 1, 2])
>>> data = np.array([1, 2, 3, 4, 5, 6])
>>> sparse.csr_matrix((data, indices, indptr), shape=(3, 3)).toarray()
array([[1, 0, 2],
[0, 0, 3],
[4, 5, 6]])
# 按row行来压缩
# 对于第i行,非0数据列是indices[indptr[i]:indptr[i+1]] 数据是data[indptr[i]:indptr[i+1]]
# 在本例中
# 第0行,有非0的数据列是indices[indptr[0]:indptr[1]] = indices[0:2] = [0,2]
# 数据是data[indptr[0]:indptr[1]] = data[0:2] = [1,2],所以在第0行第0列是1,第2列是2
# 第1行,有非0的数据列是indices[indptr[1]:indptr[2]] = indices[2:3] = [2]
# 数据是data[indptr[1]:indptr[2] = data[2:3] = [3],所以在第1行第2列是3
# 第2行,有非0的数据列是indices[indptr[2]:indptr[3]] = indices[3:6] = [0,1,2]
# 数据是data[indptr[2]:indptr[3]] = data[3:6] = [4,5,6],所以在第2行第0列是4,第1列是5,第2列是6
>>> indptr = np.array([0, 2, 3, 6])
>>> indices = np.array([0, 2, 2, 0, 1, 2])
>>> data = np.array([1, 2, 3, 4, 5, 6])
>>> sparse.csc_matrix((data, indices, indptr), shape=(3, 3)).toarray()
array([[1, 0, 4],
[0, 0, 5],
[2, 3, 6]])
# 按col列来压缩
# 对于第i列,非0数据行是indices[indptr[i]:indptr[i+1]] 数据是data[indptr[i]:indptr[i+1]]
# 在本例中
# 第0列,有非0的数据行是indices[indptr[0]:indptr[1]] = indices[0:2] = [0,2]
# 数据是data[indptr[0]:indptr[1]] = data[0:2] = [1,2],所以在第0列第0行是1,第2行是2
# 第1行,有非0的数据行是indices[indptr[1]:indptr[2]] = indices[2:3] = [2]
# 数据是data[indptr[1]:indptr[2] = data[2:3] = [3],所以在第1列第2行是3
# 第2行,有非0的数据行是indices[indptr[2]:indptr[3]] = indices[3:6] = [0,1,2]
# 数据是data[indptr[2]:indptr[3]] = data[3:6] = [4,5,6],所以在第2列第0行是4,第1行是5,第2行是6
numpy模块
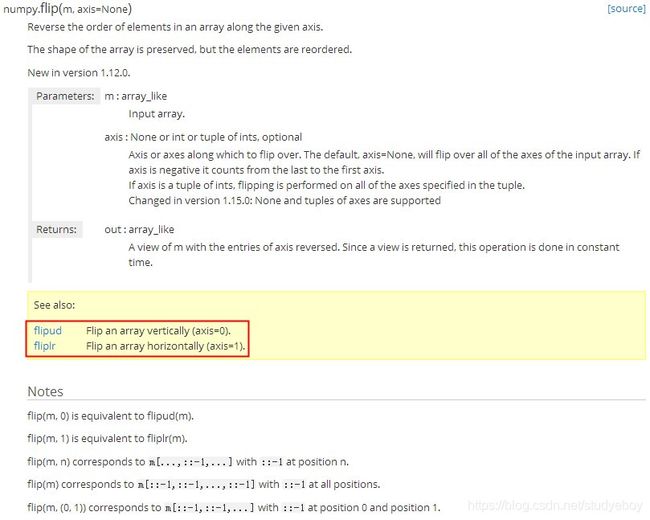
np.flip
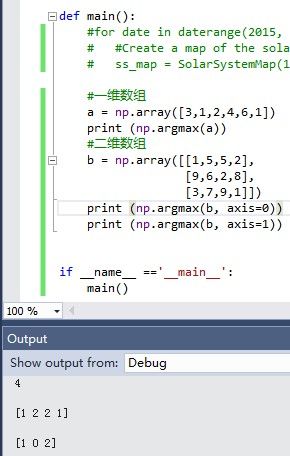
np.argmax
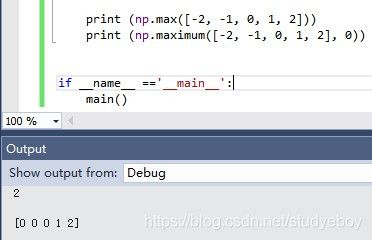
返回最大数的索引。有一个默认参数axis,默认是0,表示第几维的最大值。
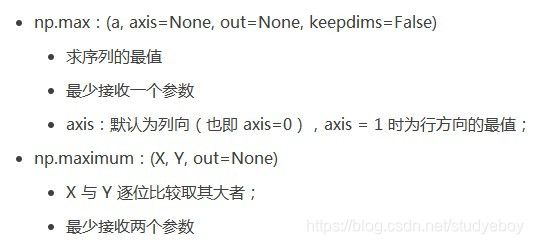
np.max
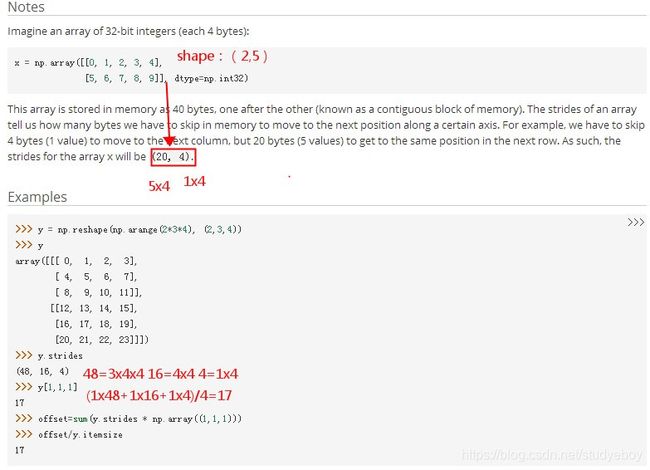
np.ndarrary.strides
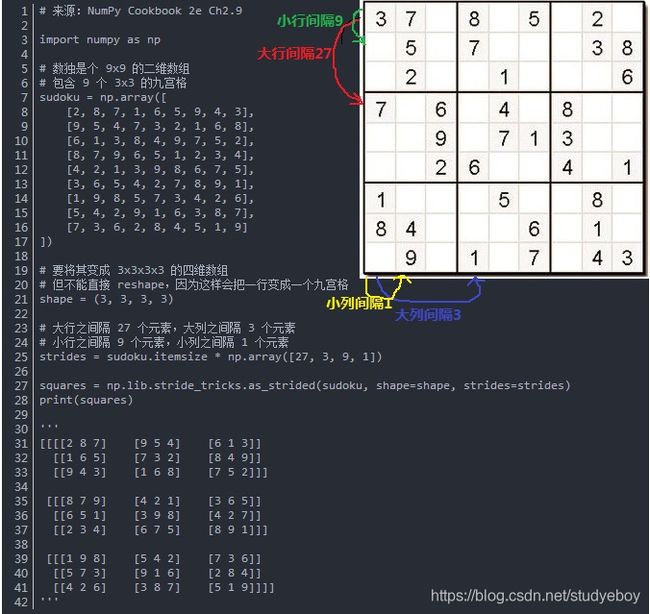
np.lib.stride_tricks.as_strided
np.ravel np.flatten np.squeeze
numpy中的ravel()、flatten()、squeeze()都有将多维数组转换为一维数组的功能,区别:
- ravel() 如果没有必要,不会产生源数据的副本,修改它会影响原来的数据
- flatten() 返回源数据的副本,修改它不会影响原来的数据
- squeenze() 只能对维数为1的维度降维
- reshape(-1) 也可以拉平多为数组

np.stack
# 沿着新轴连接数组的序列
numpy.stack(arrays, axis=0)
# axis 指定新轴在结果尺寸中的索引。
# arrarys 数组,array_like的序列每个数组必须具有相同的形状。
# 返回 堆叠数组比输入数组多一个维
>>> import numpy as np
>>> a = np.array([1,2,3])
>>> b = np.array([4,5,6])
>>> c = np.array([7,8,9])
>>> print (a.shape)
(3,)
>>> print (b.shape)
(3,)
>>> print(c.shape)
(3,)
>>> ab0 = np.stack((a,b),axis=0)
>>> print(ab0.shape)
(2, 3)
>>> print(ab0)
[[1 2 3]
[4 5 6]]
>>> ab1 = np.stack((a,b), axis=1)
>>> print(ab1.shape)
(3, 2)
>>> print (ab1)
[[1 4]
[2 5]
[3 6]]
>>> abc0 = np.stack((a,b,c),axis=0)
>>> print(abc0.shape)
(3, 3)
>>> print(abc0)
[[1 2 3]
[4 5 6]
[7 8 9]]
>>> abc1 = np.stack((a,b,c),axis=1)
>>> print(abc1.shape)
(3, 3)
>>> print(abc1)
[[1 4 7]
[2 5 8]
[3 6 9]]
>>> abc2 = np.stack((a,b,c),axis=2)
Traceback (most recent call last):
File "", line 1, in
File "C:\Program Files (x86)\Microsoft Visual Studio\Shared\Python36_64\lib\site-packages\numpy\core\shape_base.py", line 356, in stack
axis = normalize_axis_index(axis, result_ndim)
numpy.core._internal.AxisError: axis 2 is out of bounds for array of dimension 2
>>>
>>> a = np.array([[1,2,3],[4,5,6],[7,8,9]])
>>> b = np.array([[10,20,30],[40,50,60],[70,80,90]])
>>> c = np.array([[11,12,13],[14,15,16],[17,18,19]])
>>> print(a.shape)
(3, 3)
>>> print(a)
[[1 2 3]
[4 5 6]
[7 8 9]]
>>> print(b.shape)
(3, 3)
>>> print(b)
[[10 20 30]
[40 50 60]
[70 80 90]]
>>> print(c.shape)
(3, 3)
>>> print(c)
[[11 12 13]
[14 15 16]
[17 18 19]]
>>> abc0 = np.stack((a,b,c),axis=0)
>>> print(abc0.shape)
(3, 3, 3)
>>> print(abc0)
[[[ 1 2 3]
[ 4 5 6]
[ 7 8 9]]
[[10 20 30]
[40 50 60]
[70 80 90]]
[[11 12 13]
[14 15 16]
[17 18 19]]]
>>> abc1 = np.stack((a,b,c),axis=1)
>>> print(abc1.shape)
(3, 3, 3)
>>> print(abc1)
[[[ 1 2 3]
[10 20 30]
[11 12 13]]
[[ 4 5 6]
[40 50 60]
[14 15 16]]
[[ 7 8 9]
[70 80 90]
[17 18 19]]]
>>> abc2 = np.stack((a,b,c),axis=2)
>>> print(abc2.shape)
(3, 3, 3)
>>> print(abc2)
[[[ 1 10 11]
[ 2 20 12]
[ 3 30 13]]
[[ 4 40 14]
[ 5 50 15]
[ 6 60 16]]
[[ 7 70 17]
[ 8 80 18]
[ 9 90 19]]]
>>> ab0 = np.stack((a,b),axis=0)
>>> print(ab0.shape)
(2, 3, 3)
>>> print(ab0)
[[[ 1 2 3]
[ 4 5 6]
[ 7 8 9]]
[[10 20 30]
[40 50 60]
[70 80 90]]]
>>> ab1 = np.stack((a,b),axis=1)
>>> print(ab1.shape)
(3, 2, 3)
>>> print(ab1)
[[[ 1 2 3]
[10 20 30]]
[[ 4 5 6]
[40 50 60]]
[[ 7 8 9]
[70 80 90]]]
>>> ab2 = np.stack((a,b),axis=2)
>>> print(ab2.shape)
(3, 3, 2)
>>> print(ab2)
[[[ 1 10]
[ 2 20]
[ 3 30]]
[[ 4 40]
[ 5 50]
[ 6 60]]
[[ 7 70]
[ 8 80]
[ 9 90]]]
>>>
np.tile
将原矩阵横向纵向的复制。
>>> mat = np.array([[1,2],[3,4]])
>>> mat0 = np.tile(mat,(1,4))
>>> print(mat0)
[[1 2 1 2 1 2 1 2]
[3 4 3 4 3 4 3 4]]
>>> mat1 = np.tile(mat,(2,2))
>>> print(mat1)
[[1 2 1 2]
[3 4 3 4]
[1 2 1 2]
[3 4 3 4]]
>>>
np.linalg.norm
求取向量二范数,并求取单位向量(行向量计算)
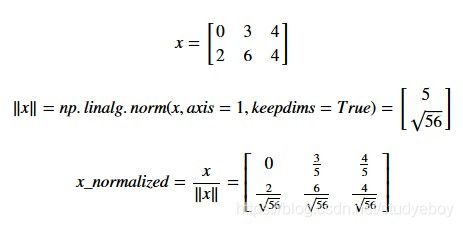
顾名思义,linalg=linear+algebra,norm则表示范数,首先需要注意的是范数是对向量(或者矩阵)的度量,是一个标量(scalar):
首先help(np.linalg.norm)查看其文档:
norm(x, ord=None, axis=None, keepdims=False)
ord为设置具体范数值,axis向量的计算方向,keepdims设置是否保持维度不变。

np.inner
>>> help(np.inner)
Help on built-in function inner in module numpy.core.multiarray:
inner(...)
inner(a, b)
Inner product of two arrays.
Ordinary inner product of vectors for 1-D arrays (without complex
conjugation), in higher dimensions a sum product over the last axes.
Parameters
----------
a, b : array_like
If `a` and `b` are nonscalar, their last dimensions must match.
Returns
-------
out : ndarray
`out.shape = a.shape[:-1] + b.shape[:-1]`
Raises
------
ValueError
If the last dimension of `a` and `b` has different size.
See Also
--------
tensordot : Sum products over arbitrary axes.
dot : Generalised matrix product, using second last dimension of `b`.
einsum : Einstein summation convention.
Notes
-----
For vectors (1-D arrays) it computes the ordinary inner-product::
np.inner(a, b) = sum(a[:]*b[:])
More generally, if `ndim(a) = r > 0` and `ndim(b) = s > 0`::
np.inner(a, b) = np.tensordot(a, b, axes=(-1,-1))
or explicitly::
np.inner(a, b)[i0,...,ir-1,j0,...,js-1]
= sum(a[i0,...,ir-1,:]*b[j0,...,js-1,:])
In addition `a` or `b` may be scalars, in which case::
np.inner(a,b) = a*b
Examples
--------
Ordinary inner product for vectors:
>>> a = np.array([1,2,3])
>>> b = np.array([0,1,0])
>>> np.inner(a, b)
2
A multidimensional example:
>>> a = np.arange(24).reshape((2,3,4))
>>> b = np.arange(4)
>>> np.inner(a, b)
array([[ 14, 38, 62],
[ 86, 110, 134]])
An example where `b` is a scalar:
>>> np.inner(np.eye(2), 7)
array([[ 7., 0.],
[ 0., 7.]])
>>> a = np.arange(24).reshape((2,3,4))
>>> print(a)
[[[ 0 1 2 3]
[ 4 5 6 7]
[ 8 9 10 11]]
[[12 13 14 15]
[16 17 18 19]
[20 21 22 23]]]
>>> b = np.arange(4)
>>> print(b)
[0 1 2 3]
>>> print(np.inner(a,b))
[[ 14 38 62]
[ 86 110 134]]
>>> a = np.array([1,2,3])
>>> b = np.array([0,1,0])
>>> print(np.inner(a, b))
2
>>> print(np.inner(np.eye(2), 7))
[[7. 0.]
[0. 7.]]
>>>
np.dot
>>> help(np.dot)
Help on built-in function dot in module numpy.core.multiarray:
dot(...)
dot(a, b, out=None)
Dot product of two arrays. Specifically,
- If both `a` and `b` are 1-D arrays, it is inner product of vectors
(without complex conjugation).
- If both `a` and `b` are 2-D arrays, it is matrix multiplication,
but using :func:`matmul` or ``a @ b`` is preferred.
- If either `a` or `b` is 0-D (scalar), it is equivalent to :func:`multiply`
and using ``numpy.multiply(a, b)`` or ``a * b`` is preferred.
- If `a` is an N-D array and `b` is a 1-D array, it is a sum product over
the last axis of `a` and `b`.
- If `a` is an N-D array and `b` is an M-D array (where ``M>=2``), it is a
sum product over the last axis of `a` and the second-to-last axis of `b`::
dot(a, b)[i,j,k,m] = sum(a[i,j,:] * b[k,:,m])
Parameters
----------
a : array_like
First argument.
b : array_like
Second argument.
out : ndarray, optional
Output argument. This must have the exact kind that would be returned
if it was not used. In particular, it must have the right type, must be
C-contiguous, and its dtype must be the dtype that would be returned
for `dot(a,b)`. This is a performance feature. Therefore, if these
conditions are not met, an exception is raised, instead of attempting
to be flexible.
Returns
-------
output : ndarray
Returns the dot product of `a` and `b`. If `a` and `b` are both
scalars or both 1-D arrays then a scalar is returned; otherwise
an array is returned.
If `out` is given, then it is returned.
Raises
------
ValueError
If the last dimension of `a` is not the same size as
the second-to-last dimension of `b`.
See Also
--------
vdot : Complex-conjugating dot product.
tensordot : Sum products over arbitrary axes.
einsum : Einstein summation convention.
matmul : '@' operator as method with out parameter.
Examples
--------
>>> np.dot(3, 4)
12
Neither argument is complex-conjugated:
>>> np.dot([2j, 3j], [2j, 3j])
(-13+0j)
For 2-D arrays it is the matrix product:
>>> a = [[1, 0], [0, 1]]
>>> b = [[4, 1], [2, 2]]
>>> np.dot(a, b)
array([[4, 1],
[2, 2]])
>>> a = np.arange(3*4*5*6).reshape((3,4,5,6))
>>> b = np.arange(3*4*5*6)[::-1].reshape((5,4,6,3))
>>> np.dot(a, b)[2,3,2,1,2,2]
499128
>>> sum(a[2,3,2,:] * b[1,2,:,2])
499128
np.inner和np.dot区别
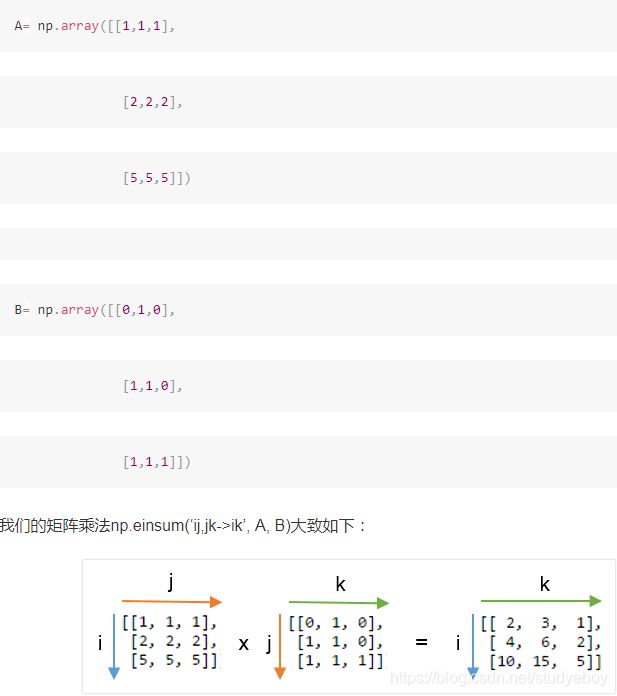
np.einsum
einsum(Einstein summation convention)函数使用爱因斯坦求和约定,在NumPy数组上指定操作。具有强大的表现力和智能循环,在速度和内存效率方面通常可以超越常见的array函数。
使用einsum的关键是为输入数组的轴和想要输出的数组选择正确的标签。例如:矩阵乘法是将行与列相乘,然后对乘积结果求和。对于两个二维数组A和B,矩阵乘法操作可以用np.einsum(‘ij,jk->ik’,A,B)完成。'ij,jk->ik’在箭头处分成两部分,左侧部分标记输入数组的轴:'ij’标记A,'jk’标记B,字符串的右侧部分用字母’ik’标记单个输出数组的轴。
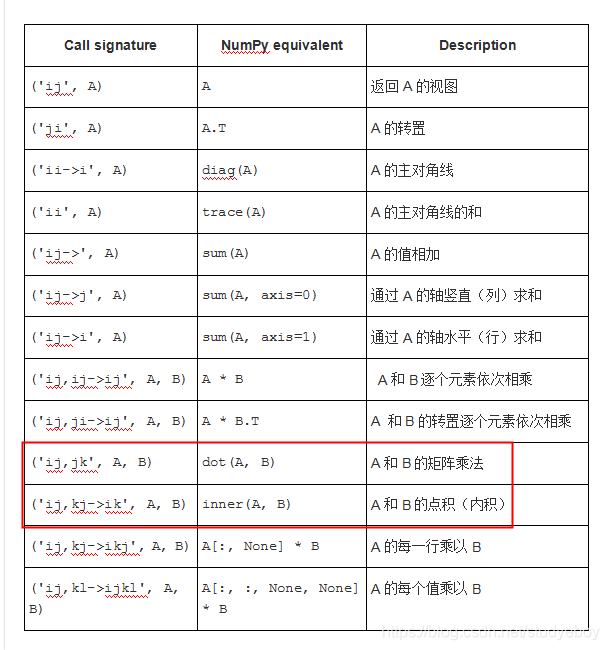
输出数组的计算方法遵循以下三原则:
- 在输入数组中重复的字母意味着值沿这些轴相乘。乘积结果为输出数组的值。
- 输出中省略的字母意味这沿该轴的值将相加。
- 可以按照喜欢的顺序返回没有进行累加的轴。
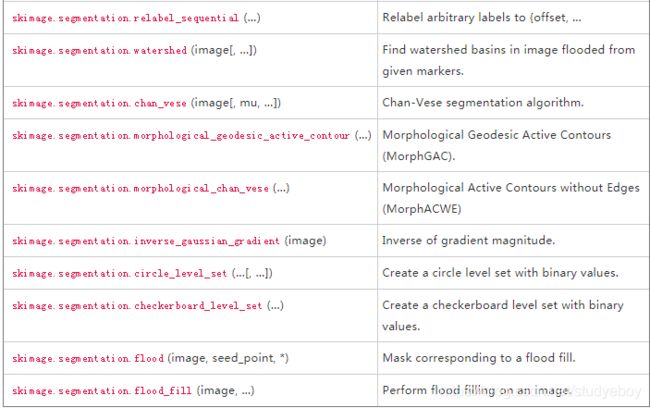
scikit-image

内建模块
deque
使用list进行数据存储时,按索引访问元素很快,因为list是线性存储,数据量大的时候,插入和删除效率很低,deque是为了高效实现插入和删除操作的双向列表,适合用于队列和栈:
from collections import deque
q = deque(['a', 'b', 'c'])
q.append('x')
q.appendLeft('y')
print(q)
#输出
deque(['y', 'a', 'b', 'c', 'x'])
PrettyTable 模块
PrettyTable是Python中的一个第三方库,用来生成美观的ASCII格式的表格。
安装
pip install prettytable
导入
from prettytable import PrettyTable
ctypes模块
ctypes是Python的一个外部库,提供和C语言兼容的数据类型,可以很方便的调用C DLL中的函数。
Python的ctypes要使用C函数,需要先将C编译成动态链接库的形式,即Windows下的.dll文件,或者Linux下的.so文件。Windows系统下的C标准库动态链接文件为msvcrt.dll。Linux系统下的C标准库动态链接文件为libc.so.6(在目录/lib/x86_64-linux-gnu下)。
导入C标准库,并使用printf函数打印一条消息。
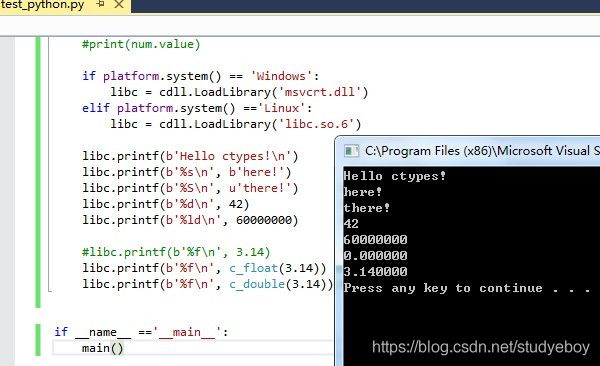
在交互窗口,不知道是什么原因还未解决:
PIL
PIL即Python Imaging Library,也即我们所称的Pillow,是一个很流行的图像库,它比opencv更为轻巧,正因为如此,它深受大众的喜爱。
PIL读进来的图像是一个对象,而不是我们所熟知的numpy矩阵。
from PIL import Image
import numpy as np
img = Image.open('1.jpg')
print (img.format) # 输出:JPEG
print (img.size) # 输出:(422,563)注意:省略了通道(w,h)
print (img.mode) #输出: RGB L为灰度图,RGB为真彩色,RGBA为加了透明通道
img.show() # 显示图片
#灰度图的读取
gray = Image.open('1.jpg').convert('L')
gray.show()
#pillow 读进来的图片不是矩阵,需要将图片转为矩阵
arr = np.array(img)
print (arr.shape) #输出:(563,422,3)
print (arr.dtype) #输出:uint8
#存储图片
#矩阵再转为图像
save_img = Image.fromarray(arr)
save_img.save('2.jpg')
#图像操作
#分离合并通道
r,g,b = img.split()
new_img = Image.merge('RGB', (b,g,r))
copy_img = img.copy() #复制图像
#ROI 获取
roi = img.crop((0,0,300,300)) #(左上x,左上y,右下x,右下y)坐标
roi.show()
内置函数
isinstance()
Python 中的isinstance()函数,用来判断一个函数是否是一个已知的类型,类似type()。
isinstance(object, classifo)
#object:实例对象
#classinfo:可以是直接或者间接类名、基本类型或者由它们组成的元组。
#返回值:如果对象的类型与参数的类型(classinfo)相同则返回TRUE,否则返回False
问题
'\u’错误
解决方法 在出现’\u’的代码处将’\u’转换为’\u’
SyntaxError: (unicode error) 'unicodeescape' codec can't decode bytes in position 726-727: truncated \uXXXX escape
#解决方法在出现'\u'的代码处将'\u'转换为'\\u'
参考文献
- https://www.cnblogs.com/hongten/p/hongten_python_glob.html
- https://www.yiibai.com/scipy/scipy_ndimage.html?app=post
- https://docs.scipy.org/doc/numpy/reference/generated/numpy.flip.html
- https://www.cnblogs.com/touch-skyer/p/8509217.html
- https://blog.csdn.net/lanchunhui/article/details/52700895
- https://docs.scipy.org/doc/numpy/reference/generated/numpy.ndarray.strides.html
- https://blog.csdn.net/shwan_ma/article/details/78244044
- https://blog.csdn.net/tymatlab/article/details/79009618
- https://blog.csdn.net/mosesRen/article/details/80275039
- https://blog.csdn.net/u010359398/article/details/82766474
- numpy.stack最通俗的理解
- 图解Numpy的tile函数
- 稀疏矩阵(coo_matrix, csr_matrix, csc_matrix)的定义和存取
- scipy csr_matrix和csc_matrix函数详解
- python 库 Numpy 中如何求取向量范数 np.linalg.norm(求范数)(向量的第二范数为传统意义上的向量长度),(如何求取向量的单位向量)
- 使用 ctypes 进行 Python 和 C 的混合编程
- Python各类图像库的图片读写方式总结
- Python中的isinstance()函数
- difference between numpy dot() and inner()
- NumPy中einsum的基本介绍
- Scipy:高级科学计算
- scikit-image
- collections