现代优化算法-模拟退火
现代优化算法-模拟退火
2020/1/19
文章目录
- 现代优化算法-模拟退火
- 简单理解模拟退火-求最大值
- Metropolis算法
- 模拟退火算法
- 符号说明
- 温度衰减函数 T ( t ) T(t) T(t)
- 内、外循环终止准则(最大迭代次数)
- 内循环
- 外循环
- 总结
- 题目解析
- 产生初始解
- 产生新解
- 退火过程
简单理解模拟退火-求最大值
兔子们用酒将自己灌醉了,它们随机跳了很长的时间。在这期间,他们可能走向高处,也可能踏入平地。但是,随着时间的流逝,他们渐渐清醒了并朝着最高方向跳去。
模拟退火算法(SAA)来源于固体退火原理,将固体加温至充分高,再让其徐徐冷却,加温时,固体内部粒子随温升变为无序状,内能增大,而徐徐冷却时粒子渐趋有序,在每个温度都达到平衡态,最后在常温时达到基态,内能减为最小。模拟退火算法能够很好的解决NP问题。
模拟退火算法能够很好的解决NP问题。NP类问题是指一个复杂问题不能确定是否在多项式时间内找到答案,但是可以在多项式时间内验证答案是否正确。NP类问题数量很大,如完全子图问题、图着色问题、旅行商TSP问题等。
Metropolis算法
假设材料在状态 i i i下的能量为 E ( i ) E(i) E(i),那么材料在温度 T T T时从状态 i i i进入状态 j j j就遵循如下规律:
(1)如果 E ( j ) ≤ E ( i ) E(j) \leq E(i) E(j)≤E(i),则接受该状态被转换。
(2)如果 E ( j ) > E ( i ) E(j)>E(i) E(j)>E(i),则状态转换被概率 e E ( i ) − E ( j ) K T e^{\frac{E(i)-E(j)}{KT}} eKTE(i)−E(j)接受。
其中 K K K是物理学中的玻尔兹曼常数。T是材料温度。
模拟退火算法
-
令 T = T 0 T=T_0 T=T0,随机生成一个初始解 x 0 x_0 x0。
-
令 T T T等于冷却进度表中的下一个值 T i T_i Ti。(温度T的变化服从某种递减函数)。
-
根据当前解 x i x_i xi进行扰动,产生一个新的解 x j x_j xj。计算相应的目标函数值 f ( x j ) f(x_j) f(xj)。
-
f ( x j ) < f ( x i ) f(x_j)
f ( x j ) > f ( x i ) f(x_j)>f(x_i) f(xj)>f(xi),若 r a n d < p rand
rand<p
,则接受新解 x j x_j xj。 r a n d rand rand是随机生成数。由Metropolis准则:
p = { 1 , f ( x j ) < f ( x i ) e − f ( x i ) − f ( x j ) T , f ( x j ) > f ( x i ) p=\left\{\begin{aligned}1, f(x_j)
扰动的方式有许多种,可以自行确定。
- 在温度 T i T_i Ti下,重复 L k L_k Lk次的扰动和接受过程。也就是上述过程中的3、4.
- 判断T是否已经达到 T f T_f Tf,如果是,则终止算法。否则继续下一个 T T T值。
符号说明
| 符号 | 意义 | 备注 |
|---|---|---|
| T 0 T_0 T0 | 冷却开始时的温度 | |
| T ( t ) T(t) T(t) | 温度衰减函数 | 将连续的温度点转换为离散点 |
| T f T_f Tf | 控制参数T的终值 | 停止准则 |
| L k L_k Lk | 马尔科夫链长度 | 任何一个温度的迭代次数 |
温度衰减函数 T ( t ) T(t) T(t)
常用的简单下降方式:
t k + 1 = α t k , 其 中 ( 0 < α < 1 ) t_{k+1}=\alpha t_{k},其中(0<\alpha<1) tk+1=αtk,其中(0<α<1)
经典模拟退火算法的降温方式:
T ( t ) = T 0 1 g ( 1 + t ) T(t)=\cfrac{T_0}{1g(1+t)} T(t)=1g(1+t)T0
快速模拟退火算法的降温方式:
T ( t ) = T 0 1 + α t T(t)=\frac{T_0}{1+\alpha t} T(t)=1+αtT0
内、外循环终止准则(最大迭代次数)
内循环
也称Metropolis抽样稳定准则。用于决定在各温度下产生候选解的数目。
(1)固定长度:在每一个温度迭代相同的步数,步数的选取同问题的大小有关。
(2)随着温度的下降,将同一温度的迭代步数增加。(由接受和拒绝的比率来控制迭代步数。)
外循环
零度法:设置终止温度的阀值。很小的正数 ξ \xi ξ。如0.000001.
循环总数控制法:设置外循环迭代次数。 T m a x T_{max} Tmax=100;
不改进规则的控制法:算法搜索到的最优值连续若干步保持不变。
总结
整个优化过程就是不断寻找新解和缓慢降低温度的交替过程。
最终的解是对该问题寻优的结果。
缺点:如果降温速度过缓,求解过程因为算法太慢而效率减小。相对于简单的搜索算法不具有明显的优势。如果降温速度过快,很可能最终得不到全局最优解。
-
要确定在每一温度下状态转换的结束准则。 也就是零度法或者不改进规则法。
-
初始温度的选择还有确定某个可行解的邻域的方法也要恰当。
题目解析
题目原文:https://blog.csdn.net/astandoffish/article/details/77189620
我方有一个基地,经度和纬度为(70,40)。假设我方飞机的速度为1000公里/小时。我方派一架飞机从基地出发,侦察完敌方所有目标,再返回原来的基地。在敌方每一目标点的侦察时间不计,求该架飞机所花费的时间(假设我方飞机巡航时间可以充分长)。
| 代码符号 | 含义 | 备注 |
|---|---|---|
| d i j d_{ij} dij | 点 i i i与点 j j j的距离 | 对称矩阵 |
| p a t h path path | 路径 | 各点排列组成的路径 |
| l o n g long long | 总路程 | 同时作为判断条件,判断新解是否被接受 |
| d j dj dj | 代价函数值 | 代价函数计算的是变动路程 Δ d \Delta d Δd |
S = [ 1 , 2 , 3 , ⋯ , 102 ] S=[1,2,3,\cdots,102] S=[1,2,3,⋯,102]
是所有路径点标签的集合。
(共有100个敌方基地,飞机需要从我方基地出发与降落,因此初始点1和中止点102均为我方基地。)
而每一个路径点都可能会被第二次,第三次,…,第101次观察。记 π i = j \large\pi_{i}=j πi=j 表示第i次经过j点, ( j ∈ 1 , 2 , ⋯ , 102 ) (j \in 1,2,\cdots,102) (j∈1,2,⋯,102)
其中,初始点和终止点 π 1 , π 102 \large\pi_{1},\large\pi_{102} π1,π102必等于1和102。
产生初始解
程序用蒙特卡洛法产生初始解,具体操作见代码部分。
产生新解
随机生成两个序号 u 、 v u、v u、v
现有解:
π 1 ⋯ π u − 1 π u π u + 1 ⋯ π v − 1 π v π v + 1 ⋯ π 102 \pi_1 \cdots \pi_{u-1} \pi_u \pi_{u+1} \cdots\pi_{v-1}\pi_{v}\pi_{v+1} \cdots \pi_{102} π1⋯πu−1πuπu+1⋯πv−1πvπv+1⋯π102
使用两点变换法,即颠倒 u , v u,v u,v之间的路径顺序:
π 1 ⋯ π u − 1 π v π v − 1 ⋯ π u + 1 π u π v + 1 ⋯ π 102 \pi_1 \cdots \pi_{u-1} \pi_v \pi_{v-1} \cdots\pi_{u+1}\pi_{u}\pi_{v+1} \cdots \pi_{102} π1⋯πu−1πvπv−1⋯πu+1πuπv+1⋯π102
这样便产生了新的解。注意,解的含义是路径。
退火过程
产生新解的过程中,实际距离变化的只有 u 、 v u、v u、v改变的边界处变动。
因此,代价函数可以表示为:
Δ d = ( d π u − 1 π v + d π u π v + 1 ) − ( d π u − 1 π u + d π v π v + 1 ) \Delta d =(d_{\pi_{u-1}\pi_{v}}+d_{\pi_{u}\pi_{v+1}})-(d_{\pi_{u-1}\pi_u}+d_{\pi_{v}\pi_{v+1}}) Δd=(dπu−1πv+dπuπv+1)−(dπu−1πu+dπvπv+1)
通过这个代价函数,结合metropolis接受准则,判断是否降温。
最终温度达到设定的值(极小),算法结束。
这里给出的是python代码,参考了matlab代码修改而成。
import pandas as pd
import matplotlib.pyplot as plt
import math
import numpy as np
import random
import matplotlib.pyplot as plt
pp = open('路径数据文件')
data = pd.read_table(pp,header=None,sep=' ')
df = pd.DataFrame(data)
# ### 转换为单列,便于合并
x = df.iloc[:, 0:8:2]
x = pd.DataFrame(x.values.reshape(-1,1))
y = df.iloc[:, 1:8:2]
y = pd.DataFrame(y.values.reshape(-1,1))
sj = pd.concat([x,y],axis=1,ignore_index=True)
sj = sj.rename(columns=({0:'x',1:'y'}))
sj = sj.values
loc0 = [70,40]
sj = np.insert(sj, 0 ,values=loc0,axis=0)
sj = np.insert(sj, len(sj) ,values=loc0,axis=0)
#增加初始列
length = len(sj)
length
sj=sj*math.pi/180 #角度化弧度
#距离计算
d = np.zeros([length,length])
for i in range(0,length-1):
for j in range(i+1,length):
temp = math.cos(sj[i,0]-sj[j,0])*math.cos(sj[i,1])*math.cos(sj[j,1])+math.sin(sj[i,1])*math.sin(sj[j,1])#计算余弦值
d[i,j]=6370*math.acos(temp)
d = d+d.T #做成对称阵
path = []
long = np.inf
for i in range(1000): #蒙特卡洛法设定初始解
array_rand = list(range(2,length))
np.random.shuffle(array)
path_0 = [1]+array_rand+[length]
#产生介于1与长度之间的随机整数。
temp = 0
for j in range(length-2):
temp+=d[path_0[j],path_0[j+1]]
if temp<long:
path = path_0
long = temp
e=0.1**30 #极小值(零度法)
L=200000 #(迭代次数)
at=0.999
T=1;
# ### 退火过程
#产生新解
for i in range(L):
c = 1+np.floor((length-2)*np.random.rand(1,2))
c = c.astype(np.int)
c.sort()
c1 = c[0,0]
c2 = c[0,1]
#计算代价函数值
dj=d[path[c1-1]-1,path[c2]-1]+d[path[c1]-1,path[c2+1]-1]-d[path[c1-1]-1,path[c1]-1]-d[path[c2]-1,path[c2+1]-1]
#接受准则
if dj<0:
tt = path[c1:c2+1]
tt = tt[::-1]
path=path[0:c1]+tt+path[c2+1:length]#将中间段倒置得到新路径
long = long + dj
T = T*at #接受并降温
elif np.exp(-dj/T)>np.random.rand(1):#路径没有变短,以一定概率接受
tt = path[c1:c2+1]
tt = tt[::-1]
path=path[0:c1]+tt+path[c2+1:length]
long = long + dj
T = T*at #接受并降温
if T<e:
break
xx = []
yy = []
for i in path:
xx.append(sj[i-1,0])
yy.append(sj[i-1,1])
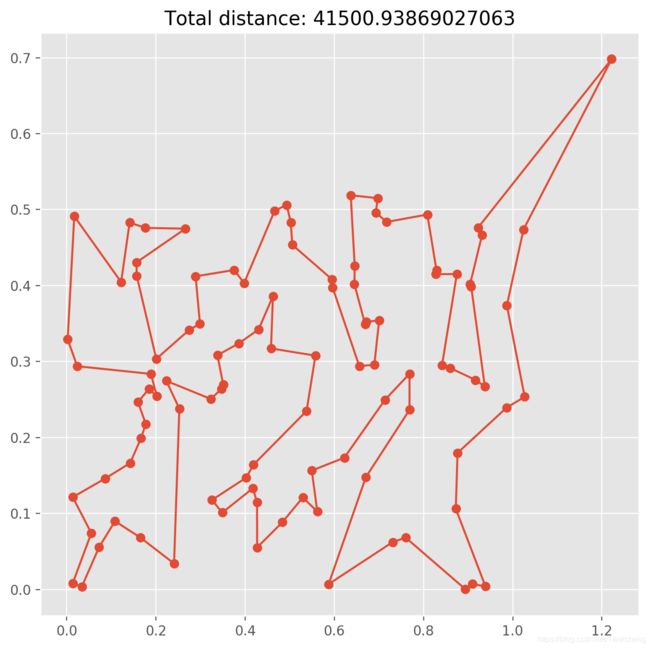
plt.figure(figsize=(8,8),dpi=200)
plt.style.use("ggplot")
plt.title('Total distance: '+ str(long))
plt.plot(xx, yy,'o-')
plt.show()
输出结果如下: