三次样条曲线拟合及Matlab/Python实现
对于形如y = a + bx + c * x^2 + d * x^3 的三次spline曲线拟合的数学原理,我就不多说了。
我接了一个图给大家看看:
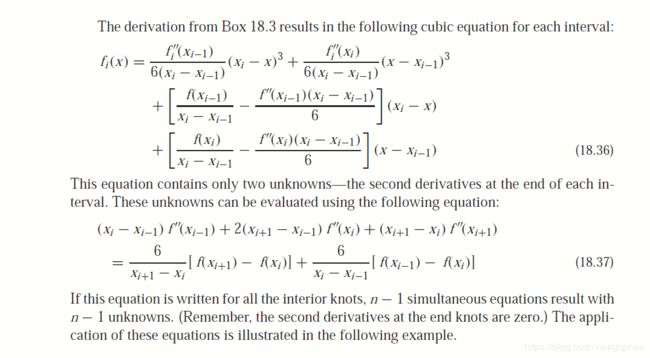
数值计算的伪代码如下:
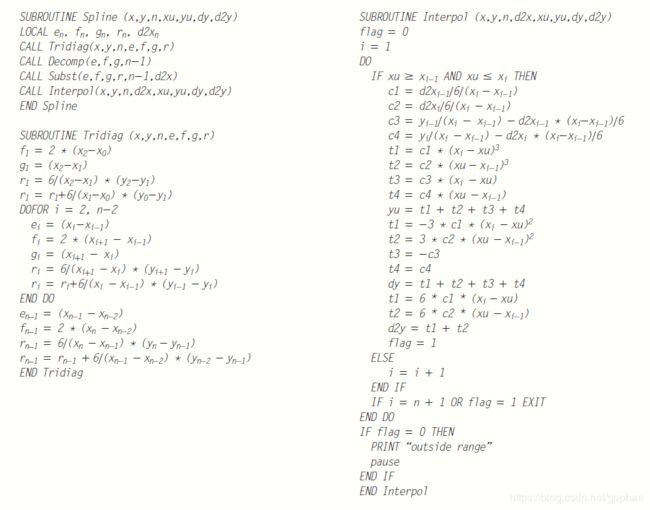
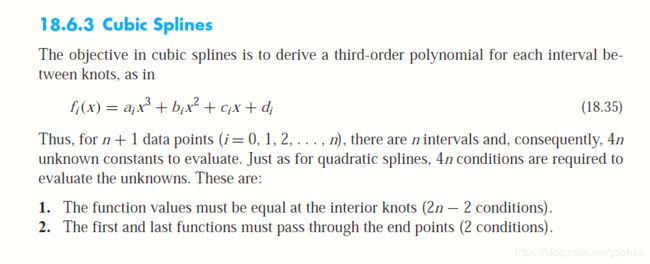
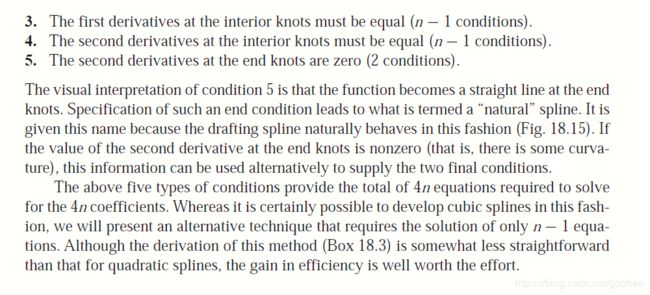
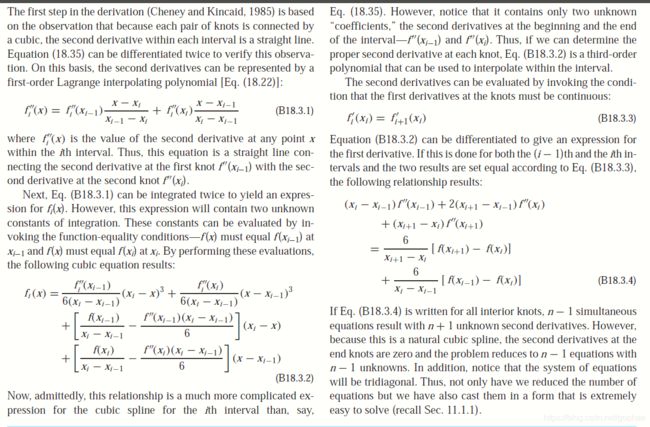
书名是:numerical_methods_for_engineers_for_engineers_chapra_canale_6th_edition
spline interpolation 在18.6章,想了解如何做三次曲线拟合的就去这个书里面找一下。
接下来就是Matlab 和 Python的实现:
Python代码来自https://github.com/gameinskysky/PythonRobotics/tree/master/PathPlanning/FrenetOptimalTrajectory
我稍作了修改:
class Spline:
u"""
Cubic Spline class
"""
def __init__(self, x, y):
self.b, self.c, self.d, self.w = [], [], [], []
self.x = x
self.y = y
self.nx = len(x) # dimension of x
h = np.diff(x)
# calc coefficient c
self.a = [iy for iy in y]
# calc coefficient c
A = self.__calc_A(h)
B = self.__calc_B(h)
self.c = np.linalg.solve(A, B)
# print(self.c1)
# calc spline coefficient b and d
for i in range(self.nx - 1):
self.d.append((self.c[i + 1] - self.c[i]) / (3.0 * h[i]))
tb = (self.a[i + 1] - self.a[i]) / h[i] - h[i] * \
(self.c[i + 1] + 2.0 * self.c[i]) / 3.0
self.b.append(tb)
def calc(self, t):
u"""
Calc position
if t is outside of the input x, return None
"""
if t < self.x[0]:
return None
elif t > self.x[-1]:
return None
i = self.__search_index(t)
dx = t - self.x[i]
result = self.a[i] + self.b[i] * dx + \
self.c[i] * dx ** 2.0 + self.d[i] * dx ** 3.0
return result
def calcd(self, t):
u"""
Calc first derivative
if t is outside of the input x, return None
"""
if t < self.x[0]:
return None
elif t > self.x[-1]:
return None
i = self.__search_index(t)
dx = t - self.x[i]
result = self.b[i] + 2.0 * self.c[i] * dx + 3.0 * self.d[i] * dx ** 2.0
return result
def calcdd(self, t):
u"""
Calc second derivative
"""
if t < self.x[0]:
return None
elif t > self.x[-1]:
return None
i = self.__search_index(t)
dx = t - self.x[i]
result = 2.0 * self.c[i] + 6.0 * self.d[i] * dx
return result
def __search_index(self, x):
u"""
search data segment index
"""
return bisect.bisect(self.x, x) - 1
def __calc_A(self, h):
u"""
calc matrix A for spline coefficient c
"""
A = np.zeros((self.nx, self.nx))
A[0, 0] = 1.0
for i in range(self.nx - 1):
if i != (self.nx - 2):
A[i + 1, i + 1] = 2.0 * (h[i] + h[i + 1])
A[i + 1, i] = h[i]
A[i, i + 1] = h[i]
A[0, 1] = 0.0
A[self.nx - 1, self.nx - 2] = 0.0
A[self.nx - 1, self.nx - 1] = 1.0
# print(A)
return A
def __calc_B(self, h):
u"""
calc matrix B for spline coefficient c
"""
B = np.zeros(self.nx)
for i in range(self.nx - 2):
B[i + 1] = 3.0 * (self.a[i + 2] - self.a[i + 1]) / \
h[i + 1] - 3.0 * (self.a[i + 1] - self.a[i]) / h[i]
# print(B)
return B
class Spline2D:
u"""
2D Cubic Spline class
"""
def __init__(self, x, y):
self.s = self.__calc_s(x, y)
self.sx = Spline(self.s, x)
self.sy = Spline(self.s, y)
def __calc_s(self, x, y):
dx = np.diff(x)
dy = np.diff(y)
self.ds = [math.sqrt(idx ** 2 + idy ** 2)
for (idx, idy) in zip(dx, dy)]
s = [0]
s.extend(np.cumsum(self.ds))
return s
def calc_position(self, s):
u"""
calc position
"""
x = self.sx.calc(s)
y = self.sy.calc(s)
return x, y
def calc_curvature(self, s):
u"""
calc curvature
"""
dx = self.sx.calcd(s)
ddx = self.sx.calcdd(s)
dy = self.sy.calcd(s)
ddy = self.sy.calcdd(s)
k = (ddy * dx - ddx * dy) / (dx ** 2 + dy ** 2)
return k
def calc_yaw(self, s):
u"""
calc yaw
"""
dx = self.sx.calcd(s)
dy = self.sy.calcd(s)
yaw = math.atan2(dy, dx)
return yaw
def calc_spline_course(x, y, ds=0.1):
sp = Spline2D(x, y)
s = list(np.arange(0, sp.s[-1], ds))
rx, ry, ryaw, rk = [], [], [], []
for i_s in s:
ix, iy = sp.calc_position(i_s)
rx.append(ix)
ry.append(iy)
ryaw.append(sp.calc_yaw(i_s))
rk.append(sp.calc_curvature(i_s))
return rx, ry, ryaw, rk, s
然后再写一个test文件:
import sys;
sys.path.append("H:\Project\TrajectoryPlanningModelDesign\Codes\frenet_optimal\frenet_optimal")#这里写你存放上面这个文件的文件夹目录
import cubic_spline
import numpy as np
import matplotlib.pyplot as plt
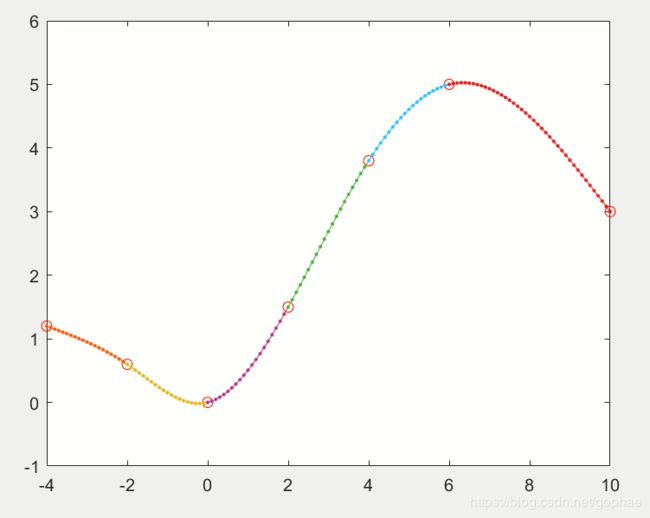
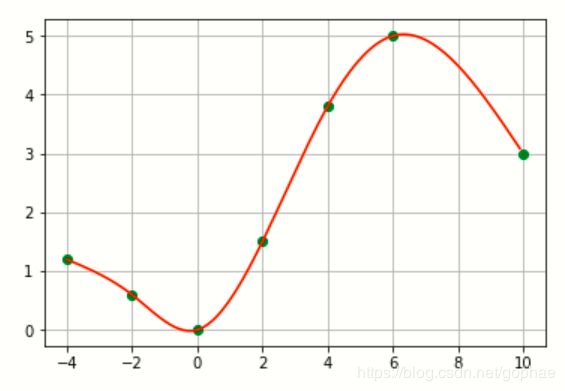
x = [-4 ,-2, 0, 2, 4, 6, 10];
y = [1.2, 0.6, 0, 1.5, 3.8, 5, 3];
spline = cubic_spline.Spline(x,y)
rx = np.arange(-4,10,0.1)
ry = [spline.calc(i) for i in rx]
plt.plot(x,y,"og")
plt.plot(rx,ry,"-r")
plt.grid(True)
#因为在jupyter 里面写的,最开始调用一下import sys
结果如图:
把python写成Matlab
clc
clear all
x = [-4 -2 0 2 4 6 10];
y = [1.2 0.6 0 1.5 3.8 5 3];
figure
plot(x,y,'ro');
hold on
N = length(x);
A = zeros(N,N);
B = zeros(N,1);
for i = 1:N-1
h(i) = x(i+1) - x(i);
end
A(1,1) = 1;
A(N,N) = 1;
for i = 2:N-1
A(i,i) = 2*(h(i-1) + h(i));
end
for i =2 : N-1
A(i, i+1) = h(i);
end
for i = 2: N-1
A(i,i-1) = h(i-1);
end
for i = 2:N-1
B(i) = 6* (y(i+1)-y(i))/h(i) - 6* (y(i)-y(i-1))/h(i-1);
end
m= A\B
for i = 1:N
a(i) = y(i);
end
for i = 1:N
c(i) = m(i)/2;
end
for i = 1:N-1
d(i) =( c(i+1)-c(i) )/(3*h(i));
end
for i = 1:N-1
b(i) = (a(i+1)-a(i))/h(i)- h(i)/3*(c(i+1)+ 2*c(i));
end
for i= 1:N-1
X = x(i):0.1:x(i+1);
Y = a(i)+ b(i)*(X-x(i)) + c(i) * (X- x(i)).^2 + d(i) * (X - x(i)).^3;
plot(X, Y,'.-')
end
结果如图: