ICRA2018-SLAM相关论文集锦
本文首发于泡泡机器人SLAM微信公众号。ICRA ,全名是IEEE International Conference on Robotics and Automation,相信大家都不陌生。今年ICRA2018(5.21-5.25)在美丽的澳大利亚布里斯班举行,作为机器人领域的顶级会议,虽然未能亲临现场,但是论文还是要读的,因此整理了一下与SLAM相关的一些论文,发现SLAM相关的论文确实不少,有70来篇,初略的看了一下,发现今年VIO的文章相对多一些,可能比较关注的是基于DSO的一篇文章,估计有不少同学也在做吧。还有就是与深度学习结合的一些文章,应该也有不少同学关注,大概看了一些深度学习结合,这里有用来估计位姿,用来做闭环检测(场景的再识别)等一些思路。还有就是SLAM的一些共性技术,比如优化、数据关联等,也有不少精彩的论文。这里按照文章的侧重点,对论文进行了一下分类,主要分为SLAM系统、VO/VIO、语义SLAM/语义地图、激光SLAM、水下SLAM、拓扑地图、结合深度学习、场景识别、数据关联、光度校正、事件相机、场景识别和其他的一些SLAM相关方向。
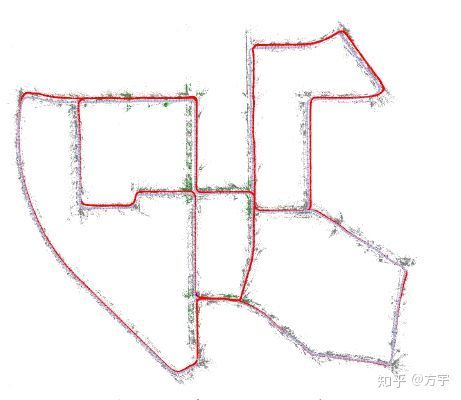
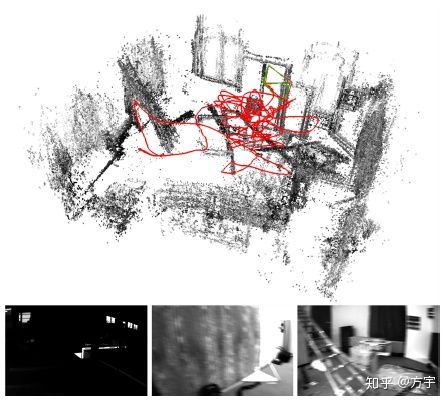
SLAM系统
今年SLAM系统一共有7篇论文,里面有的论文是基于地磁做了一个SLAM系统,有的提出了一个轻量级的SLAM系统,,也有针对手持设备提出的SLAM系统,还有一篇论文提出了解决运动速度过快,图像模糊而跟踪失败的问题方案,还有orbslam2的一篇论文,最开始还以为自己看错了,然后看了下,还真是orbslam2,具体有哪些改进,还没来得及看。具体的论文如下:
[1] iMag: Accurate and Rapidly Deployable Inertial Magneto-Inductive Localisation
[2] ProSLAM: Graph SLAM from a Programmer’s Perspective
[3] Constructing Category-Specific Models for Monocular Object-SLAM
[4] A Monocular SLAM System Leveraging Structural Regularity in Manhattan World
[5] Complementary Perception for Handheld SLAM
[6] MIS-SLAM: Real-time Large Scale Dense Deformable SLAM System in Minimal Invasive Surgery Based on Heterogeneous Computing
[7] ORB-SLAM2: An Open-Source SLAM System for Monocular, Stereo,and RGB-D Cameras
VO/VIO
这估计是今年比较火热的一个方向,感觉论文不少,比较关注的可能是基于DSO的imu融合SLAM系统吧!还有一篇以线条来指导关键点的选择,而不作为特征的论文,也比较有意思。还有一篇对VIO性能测评的文章,看上去好像也不错。
[1] Detection and Resolution of Motion Conflict in Visual Inertial Odometry
[2] Direct Sparse Visual-Inertial Odometry using Dynamic Marginalization
[3] Direct Line Guidance Odometry
[4] PIRVS: An Advanced Visual-Inertial SLAM System with Flexible Sensor Fusion and Hardware Co-Design
[5] Dense Planar-Inertial SLAM with Structural Constraints
[6] Low-Drift Visual Odometry in Structured Environments by Decoupling Rotational and Translational Motion
[7] Online Initialization and Automatic Camera-IMU Extrinsic Calibration for Monocular Visual-Inertial SLAM
[8] Relocalization, Global Optimization and Map Merging for Monocular Visual-Inertial SLAM
[9] Towards Globally Consistent Visual-Inertial Collaborative SLAM
[10] Visual odometry using a homography formulation with decoupled rotation and translation estimation using minimal solutions
[11] Encoderless Gimbal Calibration of Dynamic Multi-Camera Clusters
[12] A Benchmark Comparison of Monocular Visual-Inertial Odometry Algorithms for Flying Robots
[13] Robust Stereo Visual Inertial Odometry for Fast Autonomous Flight
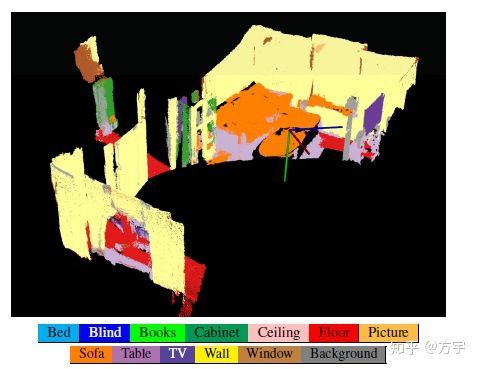
语义SLAM/语义地图
整体来看,今年语义SLAM的论文好像没有去年力度大,但是也有一些工作,关注于多帧之间的语义数据融合,还有用语义数据来校正回环检测的,我觉得这些工作才是真正的把语义数据逐渐的利用了起来,而不是像之前的一些论文,直接递归贝叶斯,然后加一个CRF搞一下,就说是语义SLAM。具体论文如下:
[1] Multi-view 3D Entangled Forest For Semantic Segmentation and Mapping
[2] A method to segment maps from different modalities using free space layout MAORIS: map of ripples segmentation
[3] Bayesian Scale Estimation for Monocular SLAM Based on Generic Object Detection for Correcting Scale Drift
[4] Semantic Mapping with Omnidirectional Vision
[5] Localization of Classified Objects in SLAM using Nonparametric Statistics and Clustering
激光SLAM
激光SLAM,今年论文好像不是很多,但是关于点云处理的有一些,3D和2D数据融合的也有一些。
[1] Efficient Continuous-time SLAM for 3D Lidar-based Online Mapping
[2] Elastic LiDAR Fusion: Dense Map-Centric Continuous-Time SLAM
[3] Direct Visual SLAM using Sparse Depth for Camera-LiDAR System
[4] IMLS-SLAM: scan-to-model matching based on 3D data
水下SLAM
之前经常看到有人问有没有关于水下SLAM的文章,今年ICRA就有,一共有三篇文章,利用水下的声学数据做SLAM,还有声呐成像等一些相关技术,具体可以去看论文。
[1] Sonar Visual Inertial SLAM of Underwater Structures
[2] Feature-based SLAM for Imaging Sonar with Under-constrained Landmarks
[3] Pose-graph SLAM using Forward-looking Sonar
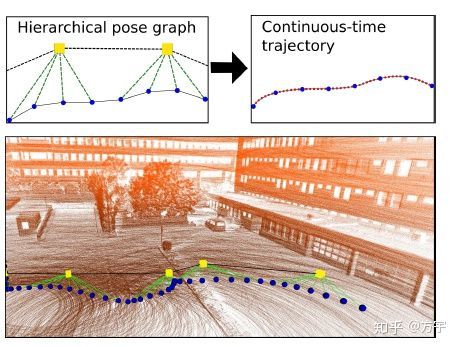
拓扑地图
拓扑地图作为导航的一种重要地图类型,对于SLAM而言还是具有一定的参考价值,因为对这个也比较感兴趣,所以单独列出来了,大家可以看看。
[1] Topomap: Topological Mapping and Navigation Based on Visual SLAM Maps
[2] Topological Multi-Robot Belief Space Planning in Unknown Environments
[3] Feature-constrained Active Visual SLAM for Mobile Robot Navigation

结合深度学习
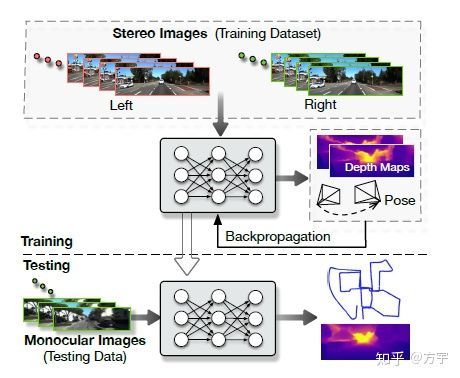
深度学习可谓是近几年来一个非常火热的领域了,深度学习在图像复原、图像分类、分割等领域都取得了突破性进展,但是在2D到3D的视觉研究上面一直也没有取得突破性的进展。今年ICRA也有很多深度学习相关的论文,这里主要关注与SLAM结合的领域。今年的深度学习与SLAM结合的领域有:估计位姿、场景的重识别(加语义信息的定位)、对高动态环境自适应等一些领域,具体论文如下:
[1] UnDeepVO: Monocular Visual Odometry through Unsupervised Deep
Learning
[2] Long-term Visual Localization using Semantically Segmented Images
[3] Learning-based Image Enhancement for Visual Odometry in Challenging
HDR Environments
[4] Driven to Distraction: Self-Supervised Distractor Learning for Robust Monocular Visual Odometry in Urban Environments
[6] Addressing Challenging Place Recognition Tasks using Generative Adversarial Networks
[7] Geometric Correspondence Network for Camera Motion Estimation
[8] LS-VO: Learning Dense Optical Subspace for Robust Visual Odometry
Estimation
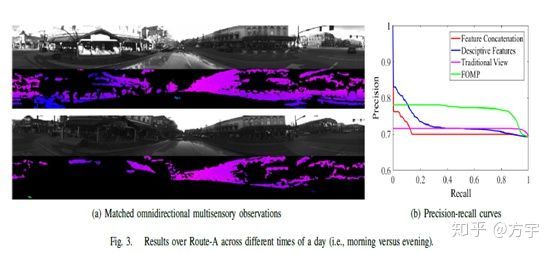
场景识别
这里的场景识别,是有两篇不是基于深度学习的场景识别算法,也可以借鉴一下。
[1] Viewpoint-tolerant Place Recognition combining 2D and 3D information
for UAV navigation
[2] Omnidirectional Multisensory Perception Fusion for Long-Term Place Recognition
数据关联
数据关联其实是SLAM系统的一个致命弱点,宁愿不关联,也不能错误关联。我个人觉得,如果我们能够将前端数据关联部分和位姿计算部分统一起来,其实是能够避免这个问题的,因为误关联造成系统崩掉的原因在于,数据关联和位姿估计是两个独立的部分,位姿估计的时候,假设关联是正确的,如果能够解决这个问题,我觉得应该可以对这块有所改善。所以数据关联其实是一个非常重要的模块。今年ICRA上也有一些讨论的文章,大家可以看一下:
[1] A General Framework for Flexible Multi-Cue Photometric Point Cloud Registration
[2] Pairwise Consistent Measurement Set Maximization for Robust Multi-robot Map Merging
[3] Data-Efficient Decentralized Visual SLAM
[4] Conditional Compatibility Branch and Bound for Feature Cloud Matching
[5] Graph Correspondence-based Point Set Registration

光度校正
光度校正是视觉里面的一个非常重要的话题,这算是对数据的一个预处理吧,今年视觉领域的best paper提名,其中就有一篇光度校正的文章,大家可以看看:
[1] Online Photometric Calibration of Auto Exposure Video for Realtime Visual Odometry and SLAM
[2] Exposure Control using Bayesian Optimization based on Entropy Weighted Image Gradient

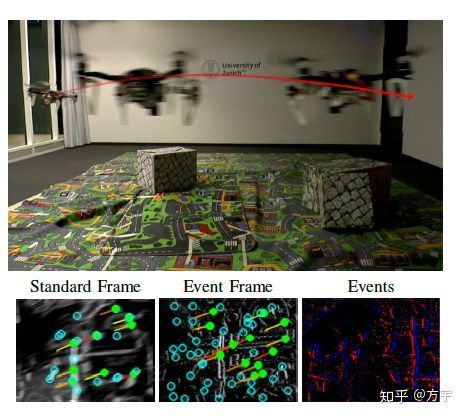
事件相机
新的传感器的出现,肯定能够带动一些SLAM方法的发展,事件相机以及优越的性能受到了研究者的关注,今年ICRA有两篇论文与此有关:
[1] Ultimate SLAM? Combining Events, Images, and IMU for Robust Visual SLAM in HDR and High Speed Scenarios
[2] The Multi Vehicle Stereo Event Camera Dataset: An Event Camera Dataset for 3D Perception
优化方法
SLAM的优化是SLAM的基础理论,主要还是关注稀疏性、增量更新、如何消除计算的复杂度、位姿图等方面。
[1] Complexity Analysis and Efficient Measurement Selection Primitives for High-Rate Graph SLAM
[2] AprilSAM: Real-time Smoothing and Mapping
[3] Fast Nonlinear Approximation of Pose Graph Node Marginalization
[4] A Linear Least Square Initialization Method for 3D Pose Graph Optimization Problem
[5] Convex Relaxations for Pose Graph Optimization with Outliers
[6] BAFS: Bundle Adjustment with Feature Scale Constraints for Enhanced Estimation Accuracy
[7] Robust Incremental SLAM under Constrained Optimization Formulation
[8] Graph SLAM sparsification with populated topologies using factor descent
Optimization

其他
这里包括一些三角化、定位、特征编码、动态场景、回环检测等与SLAM相关的技术,具体论文如下:
[1] Robust Visual Localization for Hopping Rovers on Small Bodies
[2] Sparse Gaussian Processes on Matrix Lie Groups: A Unified Framework for Optimizing Continuous-Time Trajectories
[3] Selection and Compression of Local Binary Features for Remote Visual SLAM
[4] Live Structural Modeling using RGB-D SLAM
[5] SLAMBench2: Multi-Objective Head-to-Head Benchmarking for Visual SLAM
[6] Feature-constrained Active Visual SLAM for Mobile Robot Navigation
[7] StaticFusion: Background Reconstruction for Dense RGB-D SLAM in Dynamic Environments
[8] Assigning Visual Words to Places for Loop Closure Detection
[9] Aided Inertial Navigation with Geometric Features: Observability Analysis
[10] Efficient Active SLAM based on Submap Joining, Graph Topology and Convex Optimization
[11] 2D SLAM Correction Prediction in Large Scale Urban Environments
[12] AA-ICP: Iterative Closest Point with Anderson Acceleration
[13] Talk Resource-Efficiently to Me: Optimal Communication Planning for Distributed Loop Closure Detection
[14] Eliminating Scale Drift in Monocular SLAM using Depth from Defocus
[15] Stability-Based Scale Estimation for Monocular SLAM
[16] Ef cient Octree-Based Volumetric SLAM Supporting Signed-Distance and Occupancy Mapping
[17] Incremental Segment-Based Localization in 3D Point Clouds