Python+OpenCV3.3图像处理视频教程 贾志刚 代码笔记1
2 图像加载与保存
import cv2 as cv
import numpy as np
def video_demo():
capture = cv.VideoCapture(0)
while(True):
ret, frame = capture.read()
frame = cv.flip(frame, 1)#左右调换
cv.imshow("video", frame)
c = cv.waitKey(50)
if c == 27:
break
def get_image_info(image):
print(type(image))
print(image.shape)
print(image.size)
print(image.dtype)
pixel_data = np.array(image)
print(pixel_data)
print("--------- Hello Python ---------")
src = cv.imread("D:/vcprojects/images/dog.jpg")
cv.namedWindow("input image", cv.WINDOW_AUTOSIZE)
cv.imshow("input image", src)
get_image_info(src)
video_demo()#调用摄像头
gray = cv.cvtColor(src, cv.COLOR_BGR2GRAY)
cv.imwrite("D:/result.png", gray)
#cv.imshow("gray image", gray)
cv.waitKey(0)
cv.destroyAllWindows()
--------- Hello Python ---------
(576, 768, 3)
1327104
uint8
[[[ 50 58 57]
[ 51 59 58]
[ 53 61 60]
…
[ 47 89 142]
[ 41 50 88]
[ 47 71 63]]
[[ 51 59 58]
[ 51 59 58]
[ 52 60 59]
…
[ 37 74 124]
[ 41 50 83]
[ 46 70 58]]
[[ 51 59 58]
[ 51 59 58]
[ 52 60 59]
…
[ 25 54 98]
[ 48 54 77]
[ 43 62 45]]
…
[[179 168 160]
[179 168 160]
[182 171 163]
…
[ 64 64 80]
[ 36 39 53]
[ 48 53 62]]
[[180 169 161]
[179 168 160]
[175 164 156]
…
[ 61 61 79]
[ 37 40 54]
[ 52 56 67]]
[[176 165 157]
[178 167 159]
[172 161 153]
…
[ 62 62 80]
[ 33 36 50]
[ 35 39 50]]]
3 numpy数组操作
import cv2 as cv
import numpy as np
def access_pixels(image):
print(image.shape);
height = image.shape[0]
width = image.shape[1]
channels = image.shape[2]
print("width : %s, height : %s channels : %s"%(width, height, channels))
for row in range(height):
for col in range(width):
for c in range(channels):
pv = image[row, col, c]
image[row, col, c] = 255 - pv
cv.imshow("pixels_demo", image)
def inverse(image):
dst = cv.bitwise_not(image)#像素值二进制非操作,像素取反
cv.imshow("inverse demo", dst)
def create_image():
"""
img = np.zeros([400, 400, 3], np.uint8)
#img[: , : , 0] = np.ones([400, 400])*255
img[:, :, 2] = np.ones([400, 400]) * 255
cv.imshow("new image", img)
img = np.ones([400, 400, 1], np.uint8)
img = img * 0
cv.imshow("new image", img)
cv.imwrite("D:/myImage.png", img)
"""
m1 = np.ones([3, 3], np.uint8)
m1.fill(12222.388)
print(m1)
m2 = m1.reshape([1, 9])
print(m2)
m3 = np.array([[2,3,4], [4,5,6],[7,8,9]], np.int32)
#m3.fill(9)
print(m3)
print("--------- Hello Python ---------")
src = cv.imread("D:/vcprojects/images/demo.png") # blue, green red
cv.namedWindow("input image", cv.WINDOW_AUTOSIZE)
cv.imshow("input image", src)
access_pixels(src)
t1 = cv.getTickCount()
create_image()
t2 = cv.getTickCount()
time = (t2-t1)/cv.getTickFrequency();#运行时间 s
print("time : %s ms"%(time*1000))
cv.waitKey(0)
cv.destroyAllWindows()
--------- Hello Python ---------
(448, 444, 3)
width : 444, height : 448 channels : 3
[[190 190 190]
[190 190 190]
[190 190 190]]
[[190 190 190 190 190 190 190 190 190]]
[[2 3 4]
[4 5 6]
[7 8 9]]
time : 0.6542 ms

4 色彩空间1
import cv2 as cv
import numpy as np
def color_space_demo(image):
gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)
cv.imshow("gray", gray)
hsv = cv.cvtColor(image, cv.COLOR_BGR2HSV)
cv.imshow("hsv", hsv)
yuv = cv.cvtColor(image, cv.COLOR_BGR2YUV)
cv.imshow("yuv", yuv)
Ycrcb = cv.cvtColor(image, cv.COLOR_BGR2YCrCb)
cv.imshow("ycrcb", Ycrcb)
print("--------- Hello Python ---------")
src = cv.imread("D:/vcprojects/images/demo.png")
cv.namedWindow("input image", cv.WINDOW_AUTOSIZE)
cv.imshow("input image", src)
color_space_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()
5 色彩空间2
import cv2 as cv
import numpy as np
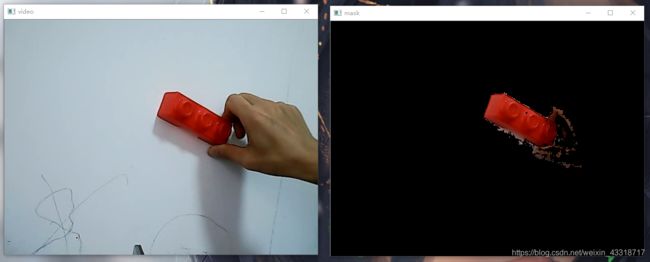
def extrace_object_demo():
#capture = cv.VideoCapture("D:/vcprojects/images/video_006.mp4")
capture = cv.VideoCapture("D:/vcprojects/images/color_object.mp4")
while(True):
ret, frame = capture.read()
if ret == False:
break;
hsv = cv.cvtColor(frame, cv.COLOR_BGR2HSV)
# #hsv绿色 min max:
# lower_hsv = np.array([37, 43, 46])
# upper_hsv = np.array([77, 255, 255])
#hsv红色 min max:
lower_hsv = np.array([0, 43, 46])
upper_hsv = np.array([10, 255, 255])
mask = cv.inRange(hsv, lowerb=lower_hsv, upperb=upper_hsv)
dst = cv.bitwise_and(frame, frame, mask=mask)
cv.imshow("video", frame)
cv.imshow("mask", dst)
c = cv.waitKey(40)
if c == 27:#esc
break
print("--------- Hello Python ---------")
src = cv.imread("D:/vcprojects/images/demo.png")
cv.namedWindow("input image", cv.WINDOW_AUTOSIZE)
cv.imshow("input image", src)
b, g, r = cv.split(src)
cv.imshow("blue", b)
cv.imshow("green", g)
cv.imshow("red", r)
src = cv.merge([b, g, r])#通道合并
src[:, :, 0] = 0
cv.imshow("changed image", src)
extrace_object_demo()
cv.waitKey(0)
cv.destroyAllWindows()
6 像素运算1
import cv2 as cv
import numpy as np
def add_demo(m1, m2):
dst = cv.add(m1, m2)
cv.imshow("add_demo", dst)
def subtract_demo(m1, m2):#减
dst = cv.subtract(m1, m2)
cv.imshow("subtract_demo", dst)
def divide_demo(m1, m2):#除
dst = cv.divide(m1, m2)
cv.imshow("divide_demo", dst)
def multiply_demo(m1, m2):#乘
dst = cv.multiply(m1, m2)
cv.imshow("multiply_demo", dst)
def others(m1, m2):
M1, dev1 = cv.meanStdDev(m1)#均值、标准方差
M2, dev2 = cv.meanStdDev(m2)
h, w = m1.shape[:2]
print(M1)
print(M2)
print(dev1)
print(dev2)
img = np.zeros([h, w], np.uint8)
m, dev = cv.meanStdDev(img)
print(m)
print(dev)
print("--------- Hello Python ---------")
src1 = cv.imread("D:/vcprojects/images/LinuxLogo.jpg")
src2 = cv.imread("D:/vcprojects/images/WindowsLogo.jpg")
print(src1.shape)
print(src2.shape)
cv.namedWindow("image1", cv.WINDOW_AUTOSIZE)
cv.imshow("image1", src1)
cv.imshow("image2", src2)
add_demo(src1, src2)
subtract_demo(src1, src2)
divide_demo(src1, src2)
multiply_demo(src1, src2)
others(src1, src2)
cv.waitKey(0)
cv.destroyAllWindows()
--------- Hello Python ---------
(240, 320, 3)
(240, 320, 3)
[[15.0128125]
[15.0128125]
[15.0128125]]
[[128.05269531]
[109.60858073]
[ 62.55748698]]
[[58.14062149]
[58.14062149]
[58.14062149]]
[[54.60093646]
[45.52335089]
[50.01800277]]
[[0.]]
[[0.]]

7 像素运算2
import cv2 as cv
import numpy as np
def logic_demo(m1, m2):#逻辑运算
dst_and = cv.bitwise_and(m1, m2)
cv.imshow("logic_and", dst_and)
dst_or = cv.bitwise_or(m1, m2)
cv.imshow("logic_or", dst_or)
image = cv.imread("D:/vcprojects/images/test.jpg")
cv.imshow("image", image)
dst_not = cv.bitwise_not(image)
cv.imshow("logic_not", dst_not)
def contrast_brightness_demo(image, c, b):#改变亮度、对比度
h, w, ch = image.shape
blank = np.zeros([h, w, ch], image.dtype)
dst = cv.addWeighted(image, c, blank, 1-c, b)
#参数分别为:图1,图1的权重,图2,图2的权重,权重和
cv.imshow("con-bri-demo", dst)
print("--------- Hello Python ---------")
src1 = cv.imread("D:/vcprojects/images/LinuxLogo.jpg")
src2 = cv.imread("D:/vcprojects/images/WindowsLogo.jpg")
cv.imshow("image1", src1)
cv.imshow("image2", src2)
logic_demo(src1, src2)
src = cv.imread("D:/vcprojects/images/lena.png")
cv.imshow("image3", src)
contrast_brightness_demo(src, 1.5, 0)
cv.waitKey(0)
cv.destroyAllWindows()
8 ROI与泛洪填充
import cv2 as cv
import numpy as np
def fill_color_demo(image):
copyImg = image.copy()
h, w = image.shape[:2]
mask = np.zeros([h+2, w+2], np.uint8)
cv.floodFill(copyImg, mask, (30, 30), (0, 255, 255), (100, 100, 100), (50, 50, 50), cv.FLOODFILL_FIXED_RANGE)
#参数分别为输入图像、mask掩膜、填充起始点、填充颜色、填充颜色低值、填充颜色高值
cv.imshow("fill_color_demo", copyImg)
def fill_binary():
image = np.zeros([400, 400, 3], np.uint8)
image[100:300, 100:300, : ] = 255
cv.imshow("fill_binary", image)
mask = np.ones([402, 402, 1], np.uint8)
mask[101:301, 101:301] = 0
cv.floodFill(image, mask, (200, 200), (100, 2, 255), cv.FLOODFILL_MASK_ONLY)
cv.imshow("filled binary", image)
print("--------- Hello Python ---------")
src = cv.imread("D:/vcprojects/images/demo.png")
cv.namedWindow("input image", cv.WINDOW_AUTOSIZE)
cv.imshow("input image", src)
src1 = src.copy()
face = src1[50:250, 100:300]
gray = cv.cvtColor(face, cv.COLOR_BGR2GRAY)
backface = cv.cvtColor(gray, cv.COLOR_GRAY2BGR)
src1[50:250, 100:300] = backface
cv.imshow("face", src1)
fill_color_demo(src)
fill_binary()
cv.waitKey(0)
cv.destroyAllWindows()

9 模糊操作
import cv2 as cv
import numpy as np
def junzhi_blur_demo(image):
dst = cv.blur(image, (5, 5))
cv.imshow("junzhi_blur", dst)
def median_blur_demo(image):#去椒盐噪声
dst = cv.medianBlur(image, 5)
cv.imshow("median_blur", dst)
def custom_blur_demo(image):#自定义模糊
kernel1 = np.ones([5, 5], np.float32)/25
kernel2 = np.array([[0, -1, 0],[-1, 5, -1],[0, -1, 0]], np.float32)#锐化算子,和为1
dst1 = cv.filter2D(image, -1, kernel=kernel1)
cv.imshow("custom_blur1", dst1)
dst2 = cv.filter2D(image, -1, kernel=kernel2)
cv.imshow("custom_blur2", dst2)
print("--------- Hello Python ---------")
src = cv.imread("D:/vcprojects/images/demo.png")
cv.namedWindow("input image", cv.WINDOW_AUTOSIZE)
cv.imshow("input image", src)
junzhi_blur_demo(src)
median_blur_demo(src)
custom_blur_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()
10 高斯模糊
import cv2 as cv
import numpy as np
def clamp(pv):
if pv > 255:
return 255
if pv < 0:
return 0
else:
return pv
def gaussian_noise(image):
h, w, c = image.shape
for row in range(h):
for col in range(w):
s = np.random.normal(0, 20, 3)
b = image[row, col, 0] # blue
g = image[row, col, 1] # green
r = image[row, col, 2] # red
image[row, col, 0] = clamp(b + s[0])
image[row, col, 1] = clamp(g + s[1])
image[row, col, 2] = clamp(r + s[2])
cv.imshow("gaussian_noise image", image)
print("--------- Hello Python ---------")
src = cv.imread("D:/vcprojects/images/example.png")
cv.namedWindow("input image", cv.WINDOW_AUTOSIZE)
cv.imshow("input image", src)
t1 = cv.getTickCount()
gaussian_noise(src)
t2 = cv.getTickCount()
time = (t2 - t1)/cv.getTickFrequency()
print("time consume : %s"%(time))
dst = cv.GaussianBlur(src, (0, 0), 15)
cv.imshow("Gaussian Blur", dst)
cv.waitKey(0)
cv.destroyAllWindows()
time consume : 1.758002