muduo框架内核剖析
muduo 网络框架分析:
首先我们要分析的肯定是能撑起muduo框架的核心骨架,moduo reactor的核心骨架是三个类,channel、Eventpool和Poller
首先看Channel,channel是用来让事件可以在reactor之中自由穿梭的,由于多线程各个线程之间都能共享内存,所以线程之间的通讯一般采用内存复制作为主要的通讯手段,muduo多线程采用的是one thread per loop,意思就是每一个线程都有一个main loop。
muduo源码简单易懂,设计小巧,先从使用来看这整个代码的运行过程,muduo代码的使用:
int main()
{
//初始化mqtt全局容器
::signal(SIGPIPE, SIG_IGN);
MQTTContainer.globalInit();
//LOG_INFO << "pid = " << getpid() << ", tid = " << CurrentThread::tid();
muduo::net::EventLoop loop;
muduo::net::InetAddress listenAddr(9500);
DeviceServer::MQTTServer server(&loop, listenAddr);
server.start();
loop.loop();
return 0;
}
这里有两个很核心的类,EventLoop和 muduo::net::TcpServer ,顺着这个线索,继续看TcpServer,start做了什么?看到这里其实我会思考两个地方,TcpServer构造函数做了什么?start又做了什么?
直接上代码
TcpServer::TcpServer(EventLoop* loop,
const InetAddress& listenAddr,
const string& nameArg,
Option option)
: loop_(CHECK_NOTNULL(loop)),
ipPort_(listenAddr.toIpPort()),
name_(nameArg),
acceptor_(new Acceptor(loop, listenAddr, option == kReusePort)),
threadPool_(new EventLoopThreadPool(loop, name_)),
connectionCallback_(defaultConnectionCallback),
messageCallback_(defaultMessageCallback),
nextConnId_(1)
{
acceptor_->setNewConnectionCallback(
std::bind(&TcpServer::newConnection, this, _1, _2));
}
核心的几个步骤
初始化了Eventloop.
loop_(CHECK_NOTNULL(loop))
初始化了线程池
threadPool_(new EventLoopThreadPool(loop, name_))
初始化了Tcp接收器
acceptor_(new Acceptor(loop, listenAddr, option == kReusePort))
好我们继续看下一步start做了什么
void TcpServer::start()
{
if (started_.getAndSet(1) == 0)
{
threadPool_->start(threadInitCallback_);
assert(!acceptor_->listenning());
loop_->runInLoop(
std::bind(&Acceptor::listen, get_pointer(acceptor_)));
}
}
start之后做了一件重要的事情,就是启动了线程池,我们继续顺着思路思考?线程池构造器做了什么?线程池start做了什么?
首先看线程池构造器
EventLoopThreadPool::EventLoopThreadPool(EventLoop* baseLoop, const string& nameArg)
: baseLoop_(baseLoop),
name_(nameArg),
started_(false),
numThreads_(0),
next_(0)
{
}
核心的功能是初始化了baseLoop ,另外一个重要的属性是numThreads线程数目
好继续看start
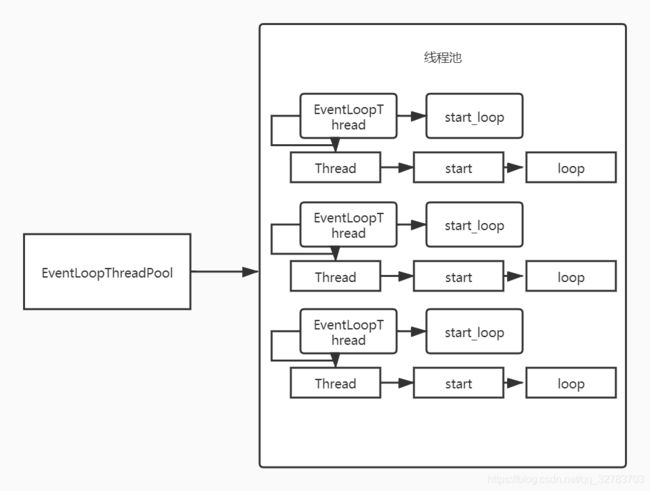
void EventLoopThreadPool::start(const ThreadInitCallback& cb)
{
assert(!started_);
baseLoop_->assertInLoopThread();
started_ = true;
for (int i = 0; i < numThreads_; ++i)
{
char buf[name_.size() + 32];
snprintf(buf, sizeof buf, "%s%d", name_.c_str(), i);
EventLoopThread* t = new EventLoopThread(cb, buf);
threads_.push_back(std::unique_ptr(t));
loops_.push_back(t->startLoop());
}
if (numThreads_ == 0 && cb)
{
cb(baseLoop_);
}
}
看到了这段代码很容易理解,muduo启动了numThreads个线程,对象保存在了线程池threads中
注意看一下cb 是什么,cb
const ThreadInitCallback& cb
是线程初始化函数,也就是muduo中的setThreadInitCallback的回调地址
EventLoopThreadPool->start中还有一个非常核心的操作就是EventLoopThread,我们依然需要关注他初始化了什么,以及startLoop做了什么,我们可以看出如果线程数目是0,在
if (numThreads_ == 0 && cb)
{
cb(baseLoop_);
}
会直接运行线程初始化函数,如果不是则会初始化的时候进入EventLoopThread中,我们看一下EventLoopThread这个函数的构造器代码
EventLoopThread::EventLoopThread(const ThreadInitCallback& cb,
const string& name)
: loop_(NULL),
exiting_(false),
thread_(std::bind(&EventLoopThread::threadFunc, this), name),
mutex_(),
cond_(mutex_),
callback_(cb)
{
}
初始化了 thread_ mutex_ cond_ callback_(线程初始化回调),初始化了一些线程的重要组件和线程实例,然后我们直接看startLoop
EventLoop* EventLoopThread::startLoop()
{
assert(!thread_.started());
thread_.start();
EventLoop* loop = NULL;
{
MutexLockGuard lock(mutex_);
while (loop_ == NULL)
{
cond_.wait();
}
loop = loop_;
}
return loop;
}这里真的是一段十分有趣的代码了在start里启动了线程,然后使用条件变量在外面等候一直到线程里初始化完成EventLoop后再赋值给loop,这段代码十分巧妙运用了glibc的条件变量,再次说明了条件变量是多线程编程中的利器,start里调用了pthread_create,不信?继续看Thread->start里的代码!
void Thread::start()
{
assert(!started_);
started_ = true;
// FIXME: move(func_)
detail::ThreadData* data = new detail::ThreadData(func_, name_, &tid_, &latch_);
if (pthread_create(&pthreadId_, NULL, &detail::startThread, data))
{
started_ = false;
delete data; // or no delete?
LOG_SYSFATAL << "Failed in pthread_create";
}
else
{
latch_.wait();
assert(tid_ > 0);
}
}
创建线程后,线程的启动代码再startThread里,我们继续去思考startThread里做了什么?,在这里不得不说muduo,Thread类设计的有他的精巧的地方
int Thread::join()
{
assert(started_);
assert(!joined_);
joined_ = true;
return pthread_join(pthreadId_, NULL);
}
Thread::~Thread()
{
if (started_ && !joined_)
{
pthread_detach(pthreadId_);
}
}
可以用join做同步监控,当然你不这么做也没有问题,如果Thread析构函数发现你再销毁Thread的时候线程并没有关闭,会调用pthread_detach防止你的线程泄漏,设计的是不是很巧妙啊!
好了我们再来思考startThread里做了什么!
void* startThread(void* obj)
{
ThreadData* data = static_cast(obj);
data->runInThread();
delete data;
return NULL;
}
线程里其实调用了
thread_(std::bind(&EventLoopThread::threadFunc, this), name),
threadFunc
void EventLoopThread::threadFunc()
{
EventLoop loop;
if (callback_)
{
callback_(&loop);
}
{
MutexLockGuard lock(mutex_);
loop_ = &loop;
cond_.notify();
}
loop.loop();
//assert(exiting_);
MutexLockGuard lock(mutex_);
loop_ = NULL;
}
触发线程初始化函数,初始化loop,通知主线程初始化完了cond.notify();
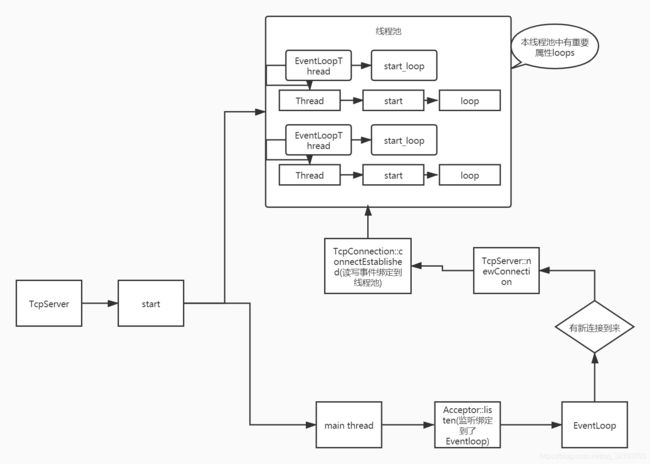
一个很巧妙的作用域缩小了锁的范围,然后开始了事件循环,好了我们用一张图分析这整个流程,注意重点在各个线程初始化完成后会把每个线程中的EventLoop统一存放到线程池的std::vector _loops里,好暴漏给TcpServer,方便TcpServer和线程池多线程间的通信
线程池池里每一个线程里做了什么,Tcpserver里做了什么?线程之间如何进行事件通讯的才是应该思考的问题!
Acceptor具有Channel和sockfd两个重要属性,在Acceptor初始化的时候把sockfd给了acceptChannel_
Acceptor::Acceptor(EventLoop* loop, const InetAddress& listenAddr, bool reuseport)
: loop_(loop),
acceptSocket_(sockets::createNonblockingOrDie(listenAddr.family())),
acceptChannel_(loop, acceptSocket_.fd()),
listenning_(false),
idleFd_(::open("/dev/null", O_RDONLY | O_CLOEXEC))
{
assert(idleFd_ >= 0);
acceptSocket_.setReuseAddr(true);
acceptSocket_.setReusePort(reuseport);
acceptSocket_.bindAddress(listenAddr);
acceptChannel_.setReadCallback(
std::bind(&Acceptor::handleRead, this));
}
我们看到当管道接受到可读事件的时候调用handleRead,我们再看一下handleRead
void Acceptor::handleRead()
{
loop_->assertInLoopThread();
InetAddress peerAddr;
//FIXME loop until no more
int connfd = acceptSocket_.accept(&peerAddr);
if (connfd >= 0)
{
// string hostport = peerAddr.toIpPort();
// LOG_TRACE << "Accepts of " << hostport;
if (newConnectionCallback_)
{
newConnectionCallback_(connfd, peerAddr);
}
else
{
sockets::close(connfd);
}
}
else
{
LOG_SYSERR << "in Acceptor::handleRead";
// Read the section named "The special problem of
// accept()ing when you can't" in libev's doc.
// By Marc Lehmann, author of libev.
if (errno == EMFILE)
{
::close(idleFd_);
idleFd_ = ::accept(acceptSocket_.fd(), NULL, NULL);
::close(idleFd_);
idleFd_ = ::open("/dev/null", O_RDONLY | O_CLOEXEC);
}
}
}
如果说有新连接进来则调用 newConnectionCallback,那newConnectionCallback是什么呢?原来是在TcpServer里绑定的回调
acceptor_->setNewConnectionCallback(
std::bind(&TcpServer::newConnection, this, _1, _2));
进一步查看newConnection做了什么
void TcpServer::newConnection(int sockfd, const InetAddress& peerAddr)
{
loop_->assertInLoopThread();
EventLoop* ioLoop = threadPool_->getNextLoop();
char buf[64];
snprintf(buf, sizeof buf, "-%s#%d", ipPort_.c_str(), nextConnId_);
++nextConnId_;
string connName = name_ + buf;
LOG_INFO << "TcpServer::newConnection [" << name_
<< "] - new connection [" << connName
<< "] from " << peerAddr.toIpPort();
InetAddress localAddr(sockets::getLocalAddr(sockfd));
// FIXME poll with zero timeout to double confirm the new connection
// FIXME use make_shared if necessary
TcpConnectionPtr conn(new TcpConnection(ioLoop,
connName,
sockfd,
localAddr,
peerAddr));
connections_[connName] = conn;
conn->setConnectionCallback(connectionCallback_);
conn->setMessageCallback(messageCallback_);
conn->setWriteCompleteCallback(writeCompleteCallback_);
conn-setCloseCallback(
std::bind(&TcpServer::removeConnection, this, _1)); // FIXME: unsafe
ioLoop->runInLoop(std::bind(&TcpConnection::connectEstablished, conn));
}
抽象产生一个TcpConnectionPtr,然后调用runInLoop,继续观察代码runInLoop
void EventLoop::runInLoop(Functor cb)
{
if (isInLoopThread())
{
cb();
}
else
{
queueInLoop(std::move(cb));
}
}
继续查看queueInLoop
void EventLoop::queueInLoop(Functor cb)
{
{
MutexLockGuard lock(mutex_);
pendingFunctors_.push_back(std::move(cb));
}
if (!isInLoopThread() || callingPendingFunctors_)
{
wakeup();
}
}
将要出发的函数挂起到pendingFunctors_,然后调用wakeup唤醒对应的线程
void EventLoop::wakeup()
{
uint64_t one = 1;
ssize_t n = sockets::write(wakeupFd_, &one, sizeof one);
if (n != sizeof one)
{
LOG_ERROR << "EventLoop::wakeup() writes " << n << " bytes instead of 8";
}
}
思考一些问题点 连接发生的时候怎么找的到对应的线程,看这里
EventLoop* ioLoop = threadPool_->getNextLoop();
结合看EventPool的初始化
EventLoop::EventLoop()
: looping_(false),
quit_(false),
eventHandling_(false),
callingPendingFunctors_(false),
iteration_(0),
threadId_(CurrentThread::tid()),
poller_(Poller::newDefaultPoller(this)),
timerQueue_(new TimerQueue(this)),
wakeupFd_(createEventfd()),
wakeupChannel_(new Channel(this, wakeupFd_)),
currentActiveChannel_(NULL)
{
LOG_DEBUG << "EventLoop created " << this << " in thread " << threadId_;
if (t_loopInThisThread)
{
LOG_FATAL << "Another EventLoop " << t_loopInThisThread
<< " exists in this thread " << threadId_;
}
else
{
t_loopInThisThread = this;
}
wakeupChannel_->setReadCallback(
std::bind(&EventLoop::handleRead, this));
// we are always reading the wakeupfd
wakeupChannel_->enableReading();
}
好了这样基本就已经都清楚了,最后用一张总结性的流程图
最后说一点管道之间的相互唤醒是通过eventfd,每个管道都是用Eventloop中的wakefd 就是 eventfd来相互唤醒