将PCD点云文件传入Vrep的一种方法
将PCD点云文件传入Vrep的一种方法
- 写在前面
- 开源
- 思路
- 外部程序
- 避坑
- 外部程序代码
- Vrep脚本
- 注
- Vrep脚本代码
- 最终效果图:
写在前面
最近遇到一个项目,需要把PCD点云文件中的点云导入到Vrep中进行仿真,然而Vrep中并没有读取PCD文件的接口,但是Vrep支持添加点云进入场景进行仿真。
开源
Github链接:https://github.com/wangrui449966/Vrep_PCD
C++的pcl环境和RemotApi环境需要自行配置
思路
通过外部的程序,读取PCD文件,得到点云后,通过RemotApi发送到Vrep中并增加这些点云。
后来发现增加点云的函数(在regular Api中)
number pointCloudHandle=simAddPointCloud(number pageMask,number layerMask,number objectHandle,number options,number pointSize,table pointCoordinates,table_12 defaultColors=nil,table pointColors=nil,table pointNormals=nil)
在RemoteApi中并没有相应的函数(如果有的话,函数名应该为simxAddPointCloud,可能以后的Vrep版本中会添加此函数),那么只能考虑在外部程序中将点云的坐标通过Vrep的stringSignal来发送给Vrep,再在Vrep的脚本中手动写读取坐标,并增加点云的方式来实现。
外部程序
避坑
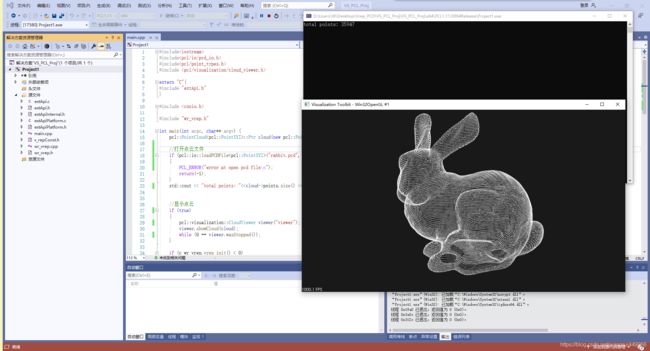
1.外部程序我选择了用C++来写,因为读取PCD文件的库(pcl库)貌似C++环境配置起来更加方便(后来我发现我错了),也许python的pcl库会更方便。
2.pcl库不但是读取PCD文件这么简单,我觉得这个库的最大意义还是在于显示点云,它可以3D显示出点云,而且可以鼠标拖动来切换视角,我以rabbit.pcd为例,放一张pcl库打开后的图像:
后来我发现pcd文件是一个ascii编码的文件,直接用记事本打开,我们来看一下内容

实际上我们需要的数据就是下面这些点的坐标(x y z,跟文件头中的FIELDS指示的顺序一样,如果要深入了解一下PCD文件头的所有字段,可以百度,资料还是挺多的~)。如果只是要得到坐标信息,用庞大的pcl库显得有些浪费且没有必要花那么多精力去配置pcl的环境,完全可以自己写一段代码来读入这些坐标(我太懒啦,以后有时间的话自己写一下这段代码,C和python实现都开源一下)。
外部程序代码
在Github中开源的代码注释已经很详细了,我在这里就写一下发送点云时的重点吧,因为有些大佬懒得去Github看代码。
//这里就是初始化了一下跟Vrep的通信,获取一下ClientID
c_wr_vrep.vrep_init();
float* buff;
//这里cloud->points.size()是点云里的点的个数
//每个点云的坐标是xyz(三个float型数据),所以要开这么多的内存
buff = (float*)malloc(sizeof(float) * cloud->points.size() * 3);
if (buff == NULL)
{
cout << "malloc failed???" << endl;
}
else
{
cout << "malloc success" << endl;
int i;
//cloud类实体是pcl库读出的点云,我们将它提取到buff里方便发送到Vrep
for (i = 0; i < cloud->points.size();i++)
{
buff[i * 3 + 0] = (float)cloud->points[i].x;
buff[i * 3 + 1] = (float)cloud->points[i].y;
buff[i * 3 + 2] = (float)cloud->points[i].z;
}
//这时buff中的内容已经是x1 y1 z1 x2 y2 z2 x3 y3 z3.........(数字是点的index)
//c_wr_vrep.set_point_cloud这个函数内容见下一个代码段
c_wr_vrep.set_point_cloud(cloud->points.size(), buff);
free(buff);//释放一下内存
cout << "free ed" << endl;
c_wr_vrep.set_point_cloud:
//size:points'num buff:x,y,z,x,y,z......
void c_wr_vrep_t::set_point_cloud(unsigned long size, float* buff)
{
if (this->inited == false)//这里检查是不是已经连接成功
{
return;
}
//创建这个StringSignal并且将buff发送到这个StringSignal里,这样Vrep脚本就可以通过读这个StringSignal来获取点云了
simxSetStringSignal(this->clientID, "point_cloud_cpp_signal", (simxUChar*)buff, size * sizeof(float) * 3, simx_opmode_oneshot);
//在Vrep的状态栏里显示一下,表示外部程序已经发送了,这个时候点云应该会在Vrep里显示出来才对
simxAddStatusbarMessage(this->clientID, "(from C++)\"point_cloud_cpp_signal\"send\r\n", simx_opmode_oneshot);
}
c_wr_vrep:这是一个类实体
typedef class
{
public:
bool inited;//是否已经连接
int clientID;//获取到clientID
int vrep_init();//连接
void set_point_cloud(unsigned long size, float* buff);//发送点云
}c_wr_vrep_t;
extern c_wr_vrep_t c_wr_vrep;
Vrep脚本
注
Vrep脚本的任务是读取外部程序创建的StringSignal得到点云坐标,并增加到点云中。
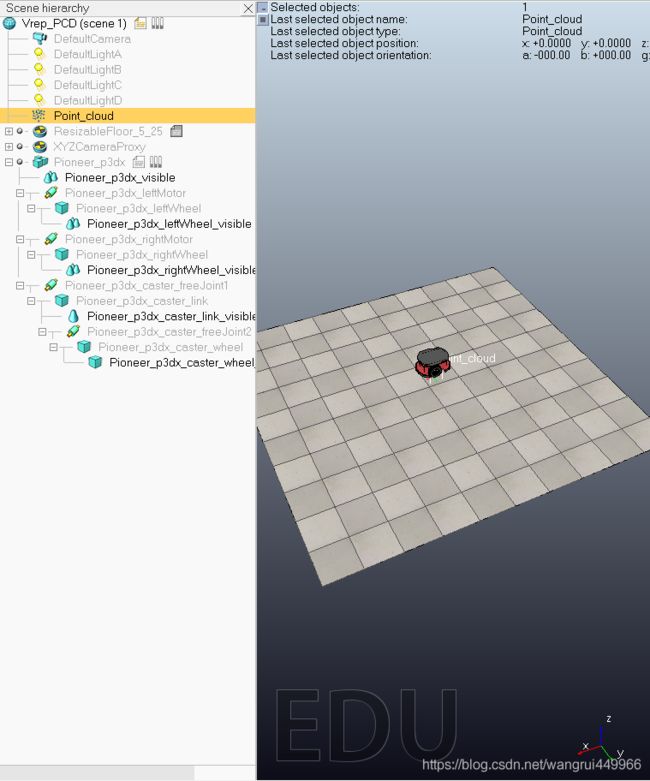
Vrep中我放置了一个空的Point_cloud,待会儿点云就增加到这个Point_cloud里,Pioneer_p3dx就是加进来写脚本的。
Vrep脚本代码
初始化区:
if (sim_call_type==sim_childscriptcall_initialization) then
motorLeft=simGetObjectHandle("Pioneer_p3dx_leftMotor")
motorRight=simGetObjectHandle("Pioneer_p3dx_rightMotor")
--WR
inited=0--用来记录是否已经收到点云,收到并增加点云后置1,防止重复增加点云消耗性能
simExtRemoteApiStart(66668)--Vrep-C++ 打开供外部RemoteApi连接的端口
simClearStringSignal("point_cloud_cpp_signal");--清除一下SignalString,因为停止仿真后SignalString并不会清除,其实严谨一点,应该再放置在清除区(sim_childscriptcall_cleanup),但为了方便,毕竟我太懒了
--wr
end
正常运行区:
if (sim_call_type==sim_childscriptcall_actuation) then
--WR
buff_raw=simGetStringSignal("point_cloud_cpp_signal")--得到StringSignal,这个时候里面还是一个一个字节的内存值
--其实这里我还考虑了一下windows默认是小端模式,会不会Vrep不是小端模式,需要每个float数据的字节顺序特别处理一下,实际上我多虑了
if buff_raw and inited==0 then --如果buff_raw不为空且还没有添加点云
buff_float=simUnpackFloatTable(buff_raw) --将String变成一个个float
inited=1--标记一下已经添加点云,防止下个仿真周期再次添加点云消耗性能
simAddStatusbarMessage("draw_cloud")--状态栏通知一下,要开始加点云了
if true then
local pointSize=2 --点云的每个点的大小(像素)
local pts={}--用来存放点云中每个点的坐标
local colors={}--用来存放点云中每个点的颜色(为了好看一些)
for i=0,#buff_float/3-1,1 do --在这个循环里 读取坐标,并生成颜色
--通过坐标生成颜色,这里怎么生成都无所谓
colors[i*3+1]=(math.sin(buff_float[i*3+1]*0.5)+1)/2*80+127
colors[i*3+2]=(math.sin(buff_float[i*3+2]*0.5)+1)/2*80+127
colors[i*3+3]=(math.sin(buff_float[i*3+3]*0.5)+1)/2*80+127
--读取坐标
pts[i*3+1]=buff_float[i*3+1]
pts[i*3+2]=buff_float[i*3+2]
pts[i*3+3]=buff_float[i*3+3]
end
point_cloud_handle=simGetObjectHandle("Point_cloud")--得到Point_cloud的句柄
simAddPointCloud(0,255,point_cloud_handle,0,pointSize,pts,nil,colors,nil)--添加点云完事儿了
end
end
--wr
simSetJointTargetVelocity(motorLeft,0)
simSetJointTargetVelocity(motorRight,0)
end
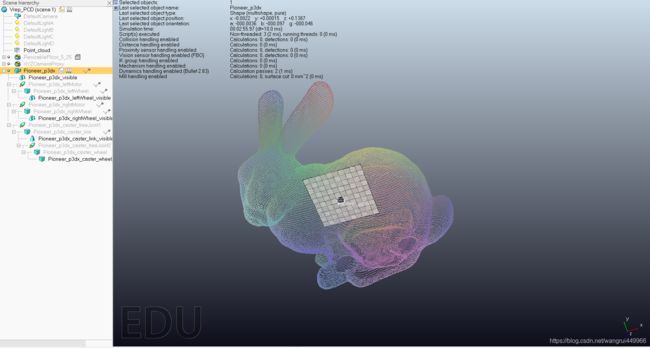
最终效果图:
兔子在Vrep里出现了: