ROS开发笔记(9)——ROS 深度强化学习应用之keras版本dqn代码分析
在ROS开发笔记(8)中构建了ROS中DQN算法的开发环境,在此基础上,对算法代码进行了分析,并做了简单的修改:
修改1 : 改变了保存模型参数在循环中的位置,原来是每个10整数倍数回合里面每一步都修改(相当于修改episode_step次),改成了每个10整数倍数回合修改一次
# if e % 10 == 0:
# agent.model.save(agent.dirPath + str(e) + '.h5')
# with open(agent.dirPath + str(e) + '.json', 'w') as outfile:
# param_keys = ['epsilon']
# param_values = [agent.epsilon]
# param_dictionary = dict(zip(param_keys, param_values))
# json.dump(param_dictionary, outfile)
修改2 :改变了agent.updateTargetModel()的位置,原来是每次done都修改,改成了每经过target_up步后修改
# if global_step % agent.target_update == 0:
# agent.updateTargetModel()
# rospy.loginfo("UPDATE TARGET NETWORK")
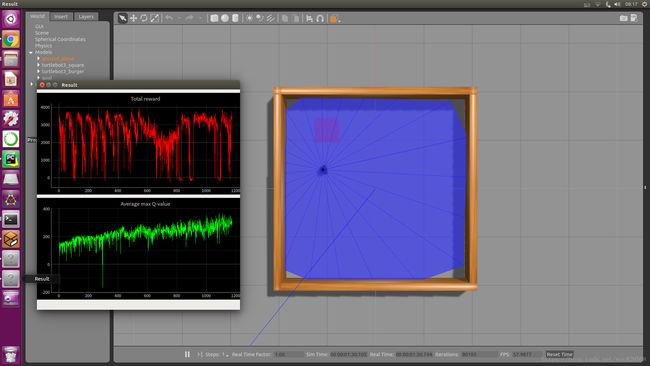
结果如下:
下面是修改后的代码及其注释:
#!/usr/bin/env python
#-*- coding:utf-8 -*-
#################################################################################
# Copyright 2018 ROBOTIS CO., LTD.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
#################################################################################
# 原作者
# Authors: Gilbert #
import rospy
import os
import json
import numpy as np
import random
import time
import sys
sys.path.append(os.path.dirname(os.path.abspath(os.path.dirname(__file__))))
from collections import deque
from std_msgs.msg import Float32MultiArray
from keras.models import Sequential, load_model
from keras.optimizers import RMSprop
from keras.layers import Dense, Dropout, Activation
# 导入 Env
from src.turtlebot3_dqn.environment_stage_1 import Env
#最大回合数
EPISODES = 3000
#强化学习网络
class ReinforceAgent():
#初始化函数
def __init__(self, state_size, action_size):
# 创建 result 话题
self.pub_result = rospy.Publisher('result', Float32MultiArray, queue_size=5)
# 获取当前文件完整路径
self.dirPath = os.path.dirname(os.path.realpath(__file__))
# 基于当前路径生成模型保存路径前缀
self.dirPath = self.dirPath.replace('turtlebot3_dqn/nodes', 'turtlebot3_dqn/save_model/stage_1_')
# 初始化 result 话题
self.result = Float32MultiArray()
#wsc self.load_model = False
#wsc self.load_episode = 0
# 导入前期训练的模型
self.load_model =True
self.load_episode = 150
# self.load_model =False
# self.load_episode = 0
#状态数
self.state_size = state_size
#动作数
self.action_size = action_size
# 单个回合最大步数
self.episode_step = 6000
# 每2000次更新一次target网络参数
self.target_update = 2000
# 折扣因子 计算reward时用 当下反馈最重要 时间越久的影响越小
self.discount_factor = 0.99
# 学习率learning_rate 学习率决定了参数移动到最优值的速度快慢。
# 如果学习率过大,很可能会越过最优值;反而如果学习率过小,优化的效率可能过低,长时间算法无法收敛。
self.learning_rate = 0.00025
# 初始ϵ——epsilon
# 探索与利用原则
# 探索强调发掘环境中的更多信息,并不局限在已知的信息中;
# 利用强调从已知的信息中最大化奖励;
# greedy策略只注重了后者,没有涉及前者;
# ϵ-greedy策略兼具了探索与利用,它以ϵ的概率从所有的action中随机抽取一个,以1−ϵ的概率抽取能获得最大化奖励的action。
self.epsilon = 1.0
#随着模型的训练,已知的信息越来越可靠,epsilon应该逐步衰减
self.epsilon_decay = 0.99
#最小的epsilon_min,低于此值后不在利用epsilon_decay衰减
self.epsilon_min = 0.05
#batch_size 批处理大小
# 合理范围内,增大 Batch_Size
# 内存利用率提高了,大矩阵乘法的并行化效率提高
# 跑完一次epoch(全数据集)所需要的迭代次数减小,对于相同数据量的处理速度进一步加快
# 在一定范围内,一般来说batch size越大,其确定的下降方向越准,引起的训练震荡越小
# 盲目增大batch size 有什么坏处
# 内存利用率提高了,但是内存容量可能撑不住了
# 跑完一次epoch(全数据集)所需要的迭代次数减少,但是想要达到相同的精度,其所花费的时间大大增加了,从而对参数的修正也就显得更加缓慢
# batch size 大到一定的程度,其确定的下降方向已经基本不再变化
self.batch_size = 64
# 用于 experience replay 的 agent.memory
# DQN的经验回放池(agent.memory)大于train_start才开始训练网络(agent.trainModel)
self.train_start = 64
# 用队列存储experience replay 数据,并设置队列最大长度
self.memory = deque(maxlen=1000000)
# 网络模型构建
self.model = self.buildModel()
#target网络构建
self.target_model = self.buildModel()
self.updateTargetModel()
# 训练可以加载之前保存的模型参数进行
if self.load_model:
self.model.set_weights(load_model(self.dirPath+str(self.load_episode)+".h5").get_weights())
with open(self.dirPath+str(self.load_episode)+'.json') as outfile:
param = json.load(outfile)
self.epsilon = param.get('epsilon')
#wsc self.epsilon = 0.5
# 网络模型构建
def buildModel(self):
# Sequential序列模型是一个线性的层次堆栈
model = Sequential()
# 设置dropout,防止过拟合
dropout = 0.2
# 添加一层全连接层,输入大小为input_shape=(self.state_size,),输出大小为64,激活函数为relu,权值初始化方法为lecun_uniform
model.add(Dense(64, input_shape=(self.state_size,), activation='relu', kernel_initializer='lecun_uniform'))
# 添加一层全连接层,输出大小为64,激活函数为relu,权值初始化方法为lecun_uniform
model.add(Dense(64, activation='relu', kernel_initializer='lecun_uniform'))
# 添加dropout层
model.add(Dropout(dropout))
# 添加一层全连接层,输出大小为action_size,权值初始化方法为lecun_uniform
model.add(Dense(self.action_size, kernel_initializer='lecun_uniform'))
# 添加一层linear激活层
model.add(Activation('linear'))
# 优化算法RMSprop是AdaGrad算法的改进。鉴于神经网络都是非凸条件下的,RMSProp在非凸条件下结果更好,改变梯度累积为指数衰减的移动平均以丢弃遥远的过去历史。
# 经验上,RMSProp被证明有效且实用的深度学习网络优化算法。rho=0.9为衰减系数,epsilon=1e-06为一个小常数,保证被小数除的稳定性
model.compile(loss='mse', optimizer=RMSprop(lr=self.learning_rate, rho=0.9, epsilon=1e-06))
# model.summary():打印出模型概况
model.summary()
return model
# 计算Q值,用到reward(当前env回馈),done,以及有taget_net网络计算得到的next_target
def getQvalue(self, reward, next_target, done):
if done:
return reward
else:
return reward + self.discount_factor * np.amax(next_target)
# eval_net用于预测 q_eval
# target_net 用于预测 q_target 值
# 将eval net权重赋给target net
def updateTargetModel(self):
self.target_model.set_weights(self.model.get_weights())
#基于ϵ——epsilon策略选择动作
def getAction(self, state):
if np.random.rand() <= self.epsilon:
self.q_value = np.zeros(self.action_size)
return random.randrange(self.action_size)
else:
q_value = self.model.predict(state.reshape(1, len(state)))
self.q_value = q_value
return np.argmax(q_value[0])
#将经验数据存入经验池 当前状态state,基于当前状态选择的动作action,执行动作获得的回报reward,执行动作后环境变成的next_state,以及done
def appendMemory(self, state, action, reward, next_state, done):
self.memory.append((state, action, reward, next_state, done))
# 训练网络模型
def trainModel(self, target=False):
mini_batch = random.sample(self.memory, self.batch_size)
X_batch = np.empty((0, self.state_size), dtype=np.float64)
Y_batch = np.empty((0, self.action_size), dtype=np.float64)
for i in range(self.batch_size):
states = mini_batch[i][0]
actions = mini_batch[i][1]
rewards = mini_batch[i][2]
next_states = mini_batch[i][3]
dones = mini_batch[i][4]
# 计算q_value
q_value = self.model.predict(states.reshape(1, len(states)))
self.q_value = q_value
#计算next_target
if target:
next_target = self.target_model.predict(next_states.reshape(1, len(next_states)))
else:
next_target = self.model.predict(next_states.reshape(1, len(next_states)))
# 计算 next_q_value
next_q_value = self.getQvalue(rewards, next_target, dones)
X_batch = np.append(X_batch, np.array([states.copy()]), axis=0)
Y_sample = q_value.copy()
Y_sample[0][actions] = next_q_value
Y_batch = np.append(Y_batch, np.array([Y_sample[0]]), axis=0)
if dones:
X_batch = np.append(X_batch, np.array([next_states.copy()]), axis=0)
Y_batch = np.append(Y_batch, np.array([[rewards] * self.action_size]), axis=0)
self.model.fit(X_batch, Y_batch, batch_size=self.batch_size, epochs=1, verbose=0)
if __name__ == '__main__':
rospy.init_node('turtlebot3_dqn_stage_1')
pub_result = rospy.Publisher('result', Float32MultiArray, queue_size=5)
pub_get_action = rospy.Publisher('get_action', Float32MultiArray, queue_size=5)
result = Float32MultiArray()
get_action = Float32MultiArray()
state_size = 26
action_size = 5
env = Env(action_size)
agent = ReinforceAgent(state_size, action_size)
scores, episodes = [], []
global_step = 0
start_time = time.time()
# 循环EPISODES个回合
for e in range(agent.load_episode + 1, EPISODES):
done = False
state = env.reset()
score = 0
# 每10个回合保存一次网络模型参数
if e % 10 == 0:
agent.model.save(agent.dirPath + str(e) + '.h5')
with open(agent.dirPath + str(e) + '.json', 'w') as outfile:
param_keys = ['epsilon']
param_values = [agent.epsilon]
param_dictionary = dict(zip(param_keys, param_values))
json.dump(param_dictionary, outfile)
# 每个回合循环episode_step步
for t in range(agent.episode_step):
# 选择动作
action = agent.getAction(state)
# Env动作一步,返回next_state, reward, done
next_state, reward, done = env.step(action)
# 存经验值
agent.appendMemory(state, action, reward, next_state, done)
# agent.memory至少要收集agent.train_start(64)个才能开始训练
# global_step 没有达到 agent.target_update之前要用到target网络的地方由eval代替
if len(agent.memory) >= agent.train_start:
if global_step <= agent.target_update:
agent.trainModel()
else:
agent.trainModel(True)
# 将回报值累加成score
score += reward
state = next_state
# 发布 get_action 话题
get_action.data = [action, score, reward]
pub_get_action.publish(get_action)
# 超过500步时设定为超时,回合结束
if t >= 500:
rospy.loginfo("Time out!!")
done = True
if done:
# 发布result话题
result.data = [score, np.max(agent.q_value)]
pub_result.publish(result)
scores.append(score)
episodes.append(e)
# 计算运行时间
m, s = divmod(int(time.time() - start_time), 60)
h, m = divmod(m, 60)
rospy.loginfo('Ep: %d score: %.2f memory: %d epsilon: %.2f time: %d:%02d:%02d',
e, score, len(agent.memory), agent.epsilon, h, m, s)
break
global_step += 1
# 每经过agent.target_update,更新target网络参数
if global_step % agent.target_update == 0:
agent.updateTargetModel()
rospy.loginfo("UPDATE TARGET NETWORK")
# 更新衰减epsilon值,直到低于等于agent.epsilon_min
if agent.epsilon > agent.epsilon_min:
agent.epsilon *= agent.epsilon_decay