正点原子阿波罗F429+STM32CubeMX+CAN收发
1、前言
出口打印等前期配置请看上一章内容点击跳转
can通讯的原理我就不说了。大家可以自行百度,我推荐一篇文章点击跳转
代码下载地址点击跳转
2、正文
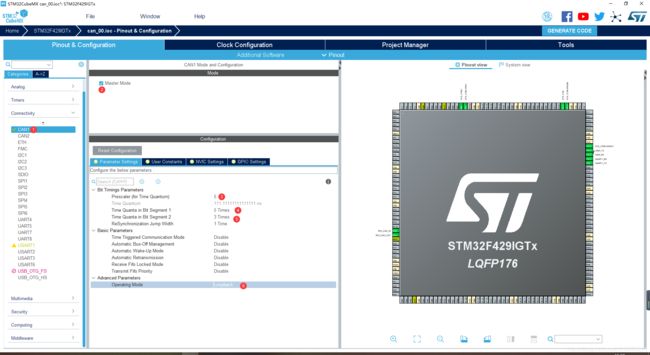
(1)、打开上个项目,加上can1,因为只有1个开发版,所以设置为环回模式,有两个扳子的话可以试试can通讯,(原子的例程是老版本的了,cubeMX新建的项目和原子的有点不兼容。但有很大的参考意义)
2.1、参考代码
2.1.1main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* © Copyright (c) 2020 STMicroelectronics.
* All rights reserved.
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "can.h"
#include "dma.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "lk_sys.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_USART1_UART_Init();
MX_CAN1_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
lk_run();
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 15;
RCC_OscInitStruct.PLL.PLLN = 216;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Activate the Over-Drive mode
*/
if (HAL_PWREx_EnableOverDrive() != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
2.1.2 lk_sys.c
#include "lk_sys.h"
#include "lk_can.h"
void lk_run(void)
{
lk_send_u("程序开始\r\n");
lk_uart_idle_init();
lk_can_init();
while (1)
{
if(lk_uart1.b_rx_state)
{
lk_send_u("lk_uart1.rx_number = %d\r\n",lk_uart1.rx_number);
lk_send_u("内容为:");
HAL_UART_Transmit_DMA(&huart1,lk_uart1.rx_buff,lk_uart1.rx_number);
lk_send_u("\r\n");
lk_uart1.b_rx_state = 0;
HAL_UART_Receive_DMA(&huart1,lk_uart1.rx_buff,lk_uart_rx_buff_max_size);
}
lk_can_send();
HAL_Delay(1000);
if(HAL_CAN_GetRxFifoFillLevel(&hcan1,CAN_RX_FIFO0))
{
lk_can_rx();
}
lk_send_u("1秒\r\n");
}
}
2.1.3 lk_sys.h
#ifndef __lk_sys_h_
#define __lk_sys_h_
#include "lk_stdio.h"
#include "lk_uart.h"
void lk_run(void);
#endif
2.1.4 lk_can.c
#include "lk_can.h"
CAN_TxHeaderTypeDef TxHeader;
CAN_RxHeaderTypeDef RxHeader;
uint8_t TxData[8];
uint8_t RxData[8];
void lk_can_init(void)
{
CAN_FilterTypeDef sFilterConfig;
sFilterConfig.FilterBank = 0;
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK;
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT;
sFilterConfig.FilterIdHigh = 0x0000;
sFilterConfig.FilterIdLow = 0x0000;
sFilterConfig.FilterMaskIdHigh = 0x0000;
sFilterConfig.FilterMaskIdLow = 0x0000;
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0;
sFilterConfig.FilterActivation = ENABLE;
sFilterConfig.SlaveStartFilterBank = 14;
if (HAL_CAN_ConfigFilter(&hcan1, &sFilterConfig) != HAL_OK)
{
/* Filter configuration Error */
Error_Handler();
}
HAL_CAN_Start(&hcan1);
memset(TxData,0,8);
}
void lk_can_send(void)
{
TxData[7]++;
TxHeader.DLC = 8;
TxHeader.ExtId = 0x12;
TxHeader.IDE = CAN_ID_STD;
TxHeader.RTR = CAN_RTR_DATA;
TxHeader.StdId = 0x12;
TxHeader.TransmitGlobalTime = DISABLE;
HAL_CAN_AddTxMessage(&hcan1,&TxHeader,TxData,(uint32_t*)CAN_TX_MAILBOX0);
}
void lk_can_rx(void)
{
memset(RxData,0,8);
if (HAL_CAN_GetRxMessage(&hcan1, CAN_RX_FIFO0, &RxHeader, RxData) == HAL_OK)
{
lk_send_u("\r\n");
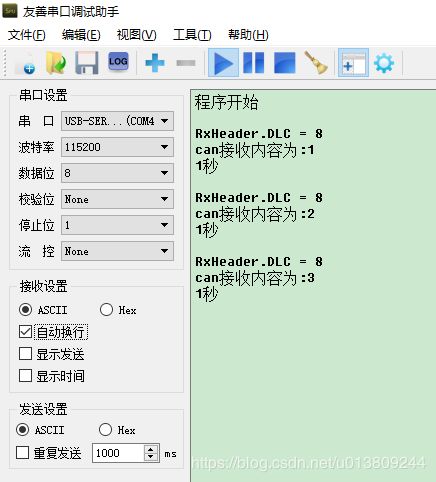
lk_send_u("RxHeader.DLC = %d\r\n",RxHeader.DLC);
lk_send_u("can接收内容为:");
lk_send_u("%d\r\n",RxData[7]);
}
}
2.1.5 lk_can.h
#ifndef __lk_can_h_
#define __lk_can_h_
#include 连接好开发版,编译下载就可以看到串口的内容的。自己可以再修改下其它代码测试下。