【引言】
本系列教程就有关CC2530单片机应用入门基础的实训案例进行分析,主要包括以下6部分的内容:
【1】CC2530微控制器开发入门基础。
【2】通用I/O端口的输入和输出。
【3】外部中断初步应用。
【4】定时/计数器的定时应用。
【5】串行通信接口应用。
【6】A/D转换器数据采集应用。
---------------------------------------------------------------------------------------------------------------------
第1课 CC2530微控制器开发入门基础
小蜜蜂笔记网 / 广东职业技术学院 欧浩源
一、什么是单片机?
单片机:Micro controller,MCU,微控制器,是一种集成电路芯片,它通过超大规模集成电路技术把具有数据处理能力的中央处理器CPU、随机存储器RAM、只读存储器ROM、输入输出I/O端口、中断控制系统、定时/计数器和通信接口等多种功能部件集成到一块硅片上,构成了一个体积小但功能完善的微型计算机系统,简单的说,单片机就是一个将微型计算机系统制作到里面的集成电路芯片。
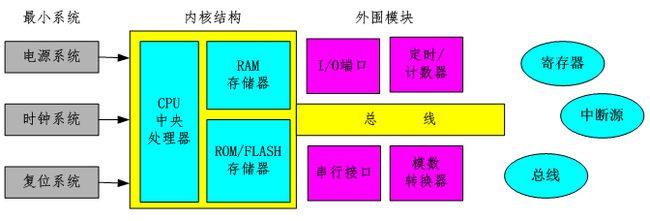
不管复杂还是简单,微控制器的基本结构:内核+外设。内核通过寄存器控制外设;外设通过中断系统通知内核;内核与外设之间通过总线传输数据、地址及控制信息。所以,嵌入式程序设计师跟底层硬件打交道的基本套路为:读写寄存器、处理中断源、访问内部总线。
单片机的程序开发与程序运行分别在两套系统运行:在桌面电脑的集成开发环境上进行程序开发;在嵌入式微处理器系统中运行程序。

二、CC2530微控制器与IAR开发环境
CC2530微控制器内部使用业界标准的增强型8051内核,结合了领先的RF收发器,是用于2.4GHz IEEE802.15.4的Zigbee应用的一个片上系统(SOC)解决方案。要进行CC2530的应用开发,就先要安装IAR相关的开发环境。IAR根据支持的微处理器种类不同分为许多不同的版本,由于CC2530使用的是增强型8051内核,所以这里应该选用的版本是IAR Embedded Workbench for 8051。
整个CC2530开发相关的环境包括:
1.安装集成开发环境:IAR-EW8051-8101。
2.安装仿真器“SmartRF4EB”的驱动程序。
3.安装代码烧写工具:Setup_SmartRF_Programmer_1.10.2。
4.安装TI的Zigbee协议栈:ZStack-CC2530-2.5.1a。

三、CC2530项目开发流程入门

【1】创建工作区
在菜单栏中,File->New->Workspace。
【2】新建IAR工程
在菜单栏中,Project->Create New Project...
<1>在这里你只能新建8051内核的工程。
<2>通过“Empty project”来新建一个空白工程。
<3>要给新建工程命名和指定存储路径。
<4>创建完毕,工程就会出现在左边工作区中。
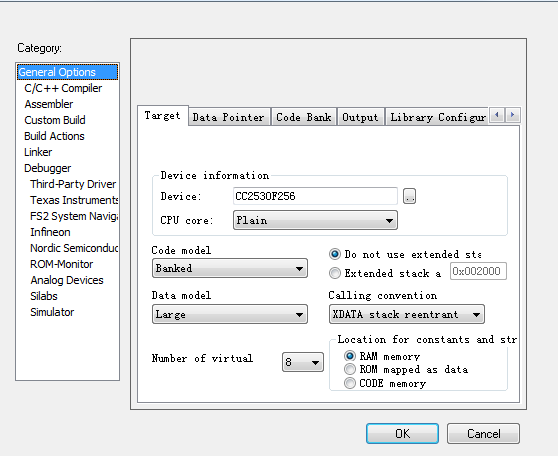
【3】配置工程选项
如果你只做在线仿真调试,只需要配置两个地方。
<1>配置芯片信息:General Options->Target->Device information
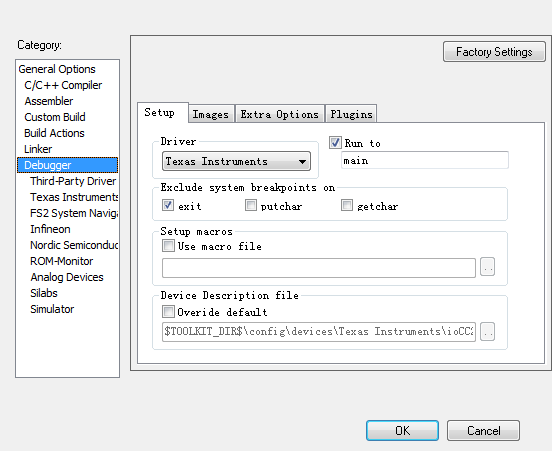
<2>配置仿真设备:Debugger->Setup->Driver
【4】添加代码文件
<1>在菜单栏中,File->New->File,创建一个空白文件。
<2>通过执行File->Save命令将文件保存到指定位置。
<3>在“Workspace”中的工程上鼠标右击,择Add->Add File...命令将代码文件添加到工程中。
【5】在代码文件中编写代码
<跑马灯代码请参照课件或其他技术笔记>
【6】编译代码
在菜单栏中,Project->Complie
或者点击工具栏中的工具按钮。
注:没有语法错误的程序才能通过编译。
【7】仿真调试
<1>将仿真器SmartRF4EB与目标板进行正确的连接:排线上三角箭头与目标板的白色三角箭头对齐。
<2>在菜单栏中,Project->Download and Debug,或者点击工具栏中“绿色三角符”按钮。
![]()
<3>进入仿真调试环境。
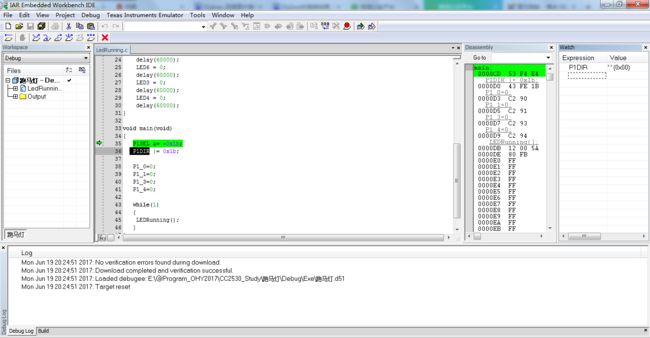
至此,大功告成,可以随意调试了。
【附件】:跑马灯的源代码。
1 #include "ioCC2530.h" 2 3 #define LED5 P1_3 4 #define LED6 P1_4 5 #define LED3 P1_0 6 #define LED4 P1_1 7 8 void delay(unsigned int t) 9 { 10 while(t--); 11 } 12 void LEDRunning() 13 { 14 LED5 = 1; 15 delay(60000); 16 LED6 = 1; 17 delay(60000); 18 LED3 = 1; 19 delay(60000); 20 delay(60000); 21 LED4 = 1; 22 delay(60000); 23 LED5 = 0; 24 delay(60000); 25 LED6 = 0; 26 delay(60000); 27 LED3 = 0; 28 delay(60000); 29 LED4 = 0; 30 delay(60000); 31 } 32 33 void main(void) 34 { 35 P1SEL &= ~0x1b; 36 P1DIR |= 0x1b; 37 38 P1_0=0; 39 P1_1=0; 40 P1_3=0; 41 P1_4=0; 42 43 while(1) 44 { 45 LEDRunning(); 46 } 47 }


