python增强现实
1,在一平面上放一个立方体
实现代码:
from pylab import *
from PIL import Image
# If you have PCV installed, these imports should work
from PCV.geometry import homography, camera
# from PCV.localdescriptors
import sift
"""
This is the augmented reality and pose estimation cube example from Section 4.3.
"""
def cube_points(c, wid):
""" Creates a list of points for plotting
a cube with plot. (the first 5 points are
the bottom square, some sides repeated). """
p = []
# bottom
p.append([c[0] - wid, c[1] - wid, c[2] - wid])
p.append([c[0] - wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] - wid, c[2] - wid])
p.append([c[0] - wid, c[1] - wid, c[2] - wid]) # same as first to close plot
# top
p.append([c[0] - wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] - wid, c[2] + wid]) # same as first to close plot
# vertical sides
p.append([c[0] - wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] - wid])
return array(p).T
def my_calibration(sz):
"""
Calibration function for the camera (iPhone4) used in this example.
"""
row, col = sz
fx = 2555 * col / 2592
fy = 2586 * row / 1936
K = diag([fx, fy, 1])
K[0, 2] = 0.5 * col
K[1, 2] = 0.5 * row
return K
# compute features
sift.process_image('D:/img/1.jpg', 'im0.sift')
l0, d0 = sift.read_features_from_file('im0.sift')
sift.process_image('D:/img/2.jpg', 'im1.sift')
l1, d1 = sift.read_features_from_file('im1.sift')
# match features and estimate homography
matches = sift.match_twosided(d0, d1)
ndx = matches.nonzero()[0]
fp = homography.make_homog(l0[ndx, :2].T)
ndx2 = [int(matches[i]) for i in ndx]
tp = homography.make_homog(l1[ndx2, :2].T)
model = homography.RansacModel()
H, inliers = homography.H_from_ransac(fp, tp, model)
# camera calibration
K = my_calibration((747, 1000))
# 3D points at plane z=0 with sides of length 0.2
box = cube_points([0, 0, 0.1], 0.1)
# project bottom square in first image
cam1 = camera.Camera(hstack((K, dot(K, array([[0], [0], [-1]])))))
# first points are the bottom square
box_cam1 = cam1.project(homography.make_homog(box[:, :5]))
# use H to transfer points to the second image
box_trans = homography.normalize(dot(H, box_cam1))
# compute second camera matrix from cam1 and H
cam2 = camera.Camera(dot(H, cam1.P))
A = dot(linalg.inv(K), cam2.P[:, :3])
A = array([A[:, 0], A[:, 1], cross(A[:, 0], A[:, 1])]).T
cam2.P[:, :3] = dot(K, A)
# project with the second camera
box_cam2 = cam2.project(homography.make_homog(box))
# plotting
im0 = array(Image.open('D:/img/1.JPG'))
im1 = array(Image.open('D:/img/2.JPG'))
figure()
imshow(im0)
plot(box_cam1[0, :], box_cam1[1, :], linewidth=3)
title('2D projection of bottom square')
axis('off')
figure()
imshow(im1)
plot(box_trans[0, :], box_trans[1, :], linewidth=3)
title('2D projection transfered with H')
axis('off')
figure()
imshow(im1)
plot(box_cam2[0, :], box_cam2[1, :], linewidth=3)
title('3D points projected in second image')
axis('off')
show()结果:
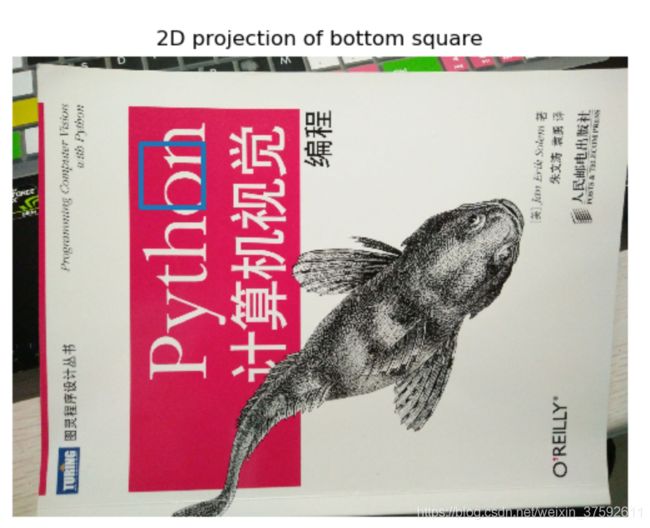

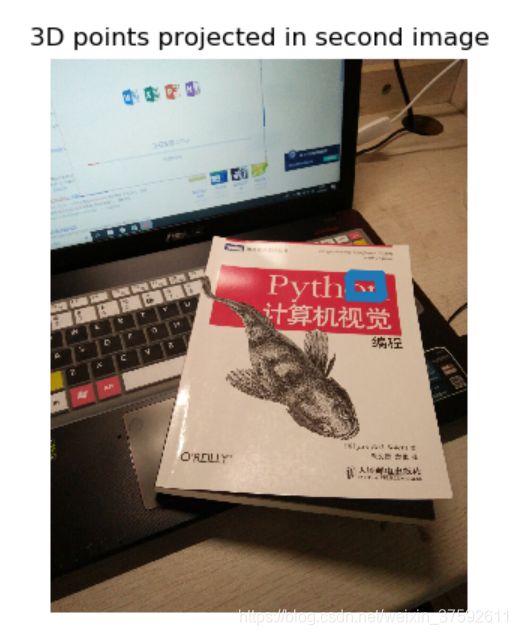
图1 图2 图3
使用平面物体作为标记物,来计算用于新视图投影矩阵的例子。将图像的特征和对齐后的标记匹配,计算除单应矩阵,然后用于计算照相机的姿态。将有一个蓝色正方形区域的模板图像(图1),从未知视觉拍摄的一幅图像,该图像包含同一个正方形,该正方形已经经过估计的单应性矩阵进行了变换(图2),使用计算出的照相机矩阵变换立方体(图3)
二,在图像中放置虚拟物体
import math
import pickle
from pylab import *
from OpenGL.GL import *
from OpenGL.GLU import *
from OpenGL.GLUT import *
import pygame, pygame.image
from pygame.locals import *
from PCV.geometry import homography, camera
import sift
def cube_points(c, wid):
""" Creates a list of points for plotting
a cube with plot. (the first 5 points are
the bottom square, some sides repeated). """
p = []
# bottom
p.append([c[0] - wid, c[1] - wid, c[2] - wid])
p.append([c[0] - wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] - wid, c[2] - wid])
p.append([c[0] - wid, c[1] - wid, c[2] - wid]) # same as first to close plot
# top
p.append([c[0] - wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] - wid, c[2] + wid]) # same as first to close plot
# vertical sides
p.append([c[0] - wid, c[1] - wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] + wid])
p.append([c[0] - wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] - wid])
p.append([c[0] + wid, c[1] + wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] + wid])
p.append([c[0] + wid, c[1] - wid, c[2] - wid])
return array(p).T
def my_calibration(sz):
row, col = sz
fx = 2555 * col / 2592
fy = 2586 * row / 1936
K = diag([fx, fy, 1])
K[0, 2] = 0.5 * col
K[1, 2] = 0.5 * row
return K
def set_projection_from_camera(K):
glMatrixMode(GL_PROJECTION)
glLoadIdentity()
fx = K[0, 0]
fy = K[1, 1]
fovy = 2 * math.atan(0.5 * height / fy) * 180 / math.pi
aspect = (width * fy) / (height * fx)
near = 0.1
far = 100.0
gluPerspective(fovy, aspect, near, far)
glViewport(0, 0, width, height)
def set_modelview_from_camera(Rt):
glMatrixMode(GL_MODELVIEW)
glLoadIdentity()
Rx = np.array([[1, 0, 0], [0, 0, -1], [0, 1, 0]])
R = Rt[:, :3]
U, S, V = np.linalg.svd(R)
R = np.dot(U, V)
R[0, :] = -R[0, :]
t = Rt[:, 3]
M = np.eye(4)
M[:3, :3] = np.dot(R, Rx)
M[:3, 3] = t
M = M.T
m = M.flatten()
glLoadMatrixf(m)
def draw_background(imname):
bg_image = pygame.image.load(imname).convert()
bg_data = pygame.image.tostring(bg_image, "RGBX", 1)
glMatrixMode(GL_MODELVIEW)
glLoadIdentity()
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT)
glEnable(GL_TEXTURE_2D)
glBindTexture(GL_TEXTURE_2D, glGenTextures(1))
glTexImage2D(GL_TEXTURE_2D, 0, GL_RGBA, width, height, 0, GL_RGBA, GL_UNSIGNED_BYTE, bg_data)
glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_NEAREST)
glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_NEAREST)
glBegin(GL_QUADS)
glTexCoord2f(0.0, 0.0);
glVertex3f(-1.0, -1.0, -1.0)
glTexCoord2f(1.0, 0.0);
glVertex3f(1.0, -1.0, -1.0)
glTexCoord2f(1.0, 1.0);
glVertex3f(1.0, 1.0, -1.0)
glTexCoord2f(0.0, 1.0);
glVertex3f(-1.0, 1.0, -1.0)
glEnd()
glDeleteTextures(1)
def draw_teapot(size):
glEnable(GL_LIGHTING)
glEnable(GL_LIGHT0)
glEnable(GL_DEPTH_TEST)
glClear(GL_DEPTH_BUFFER_BIT)
glMaterialfv(GL_FRONT, GL_AMBIENT, [0, 0, 0, 0])
glMaterialfv(GL_FRONT, GL_DIFFUSE, [0.5, 0.0, 0.0, 0.0])
glMaterialfv(GL_FRONT, GL_SPECULAR, [0.7, 0.6, 0.6, 0.0])
glMaterialf(GL_FRONT, GL_SHININESS, 0.25 * 128.0)
glutSolidTeapot(size)
width, height = 1000, 747
def setup():
pygame.init()
pygame.display.set_mode((width, height), OPENGL | DOUBLEBUF)
pygame.display.set_caption("OpenGL AR demo")
# compute features
sift.process_image('book_frontal.JPG', 'im0.sift')
l0, d0 = sift.read_features_from_file('im0.sift')
sift.process_image('book_perspective.JPG', 'im1.sift')
l1, d1 = sift.read_features_from_file('im1.sift')
# match features and estimate homography
matches = sift.match_twosided(d0, d1)
ndx = matches.nonzero()[0]
fp = homography.make_homog(l0[ndx, :2].T)
ndx2 = [int(matches[i]) for i in ndx]
tp = homography.make_homog(l1[ndx2, :2].T)
model = homography.RansacModel()
H, inliers = homography.H_from_ransac(fp, tp, model)
K = my_calibration((747, 1000))
cam1 = camera.Camera(hstack((K, dot(K, array([[0], [0], [-1]])))))
box = cube_points([0, 0, 0.1], 0.1)
box_cam1 = cam1.project(homography.make_homog(box[:, :5]))
box_trans = homography.normalize(dot(H, box_cam1))
cam2 = camera.Camera(dot(H, cam1.P))
A = dot(linalg.inv(K), cam2.P[:, :3])
A = array([A[:, 0], A[:, 1], cross(A[:, 0], A[:, 1])]).T
cam2.P[:, :3] = dot(K, A)
Rt = dot(linalg.inv(K), cam2.P)
setup()
draw_background("book_perspective.bmp")
set_projection_from_camera(K)
set_modelview_from_camera(Rt)
draw_teapot(0.05)
pygame.display.flip()
while True:
for event in pygame.event.get():
if event.type == pygame.QUIT:
sys.exit()三,视频的投影
air_main.py
# Useful links
# http://www.pygame.org/wiki/OBJFileLoader
# https://rdmilligan.wordpress.com/2015/10/15/augmented-reality-using-opencv-opengl-and-blender/
# https://clara.io/library
# TODO -> Implement command line arguments (scale, model and object to be projected)
# -> Refactor and organize code (proper funcition definition and separation, classes, error handling...)
import argparse
import cv2
import numpy as np
import math
import os
from objloader_simple import *
# Minimum number of matches that have to be found
# to consider the recognition valid
MIN_MATCHES = 10
def main():
"""
This functions loads the target surface image,
"""
homography = None
# matrix of camera parameters (made up but works quite well for me)
camera_parameters = np.array([[800, 0, 320], [0, 800, 240], [0, 0, 1]])
# create ORB keypoint detector
orb = cv2.ORB_create()
# create BFMatcher object based on hamming distance
bf = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
# load the reference surface that will be searched in the video stream
dir_name = os.getcwd()
model = cv2.imread(os.path.join(dir_name, 'D:/reference/model.jpg'), 0)
# Compute model keypoints and its descriptors
kp_model, des_model = orb.detectAndCompute(model, None)
# Load 3D model from OBJ file
obj = OBJ(os.path.join(dir_name, 'D:/models/fox.obj'), swapyz=True)
# init video capture
#1cap = cv2.VideoCapture(0)
camera_number = 0
cap = cv2.VideoCapture(camera_number + cv2.CAP_DSHOW)
while True:
# read the current frame
ret, frame = cap.read()
if not ret:
print("Unable to capture video")
return
# find and draw the keypoints of the frame
kp_frame, des_frame = orb.detectAndCompute(frame, None)
# match frame descriptors with model descriptors
matches = bf.match(des_model, des_frame)
# sort them in the order of their distance
# the lower the distance, the better the match
matches = sorted(matches, key=lambda x: x.distance)
# compute Homography if enough matches are found
if len(matches) > MIN_MATCHES:
# differenciate between source points and destination points
src_pts = np.float32([kp_model[m.queryIdx].pt for m in matches]).reshape(-1, 1, 2)
dst_pts = np.float32([kp_frame[m.trainIdx].pt for m in matches]).reshape(-1, 1, 2)
# compute Homography
homography, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
if args.rectangle:
# Draw a rectangle that marks the found model in the frame
h, w = model.shape
pts = np.float32([[0, 0], [0, h - 1], [w - 1, h - 1], [w - 1, 0]]).reshape(-1, 1, 2)
# project corners into frame
dst = cv2.perspectiveTransform(pts, homography)
# connect them with lines
frame = cv2.polylines(frame, [np.int32(dst)], True, 255, 3, cv2.LINE_AA)
# if a valid homography matrix was found render cube on model plane
if homography is not None:
try:
# obtain 3D projection matrix from homography matrix and camera parameters
projection = projection_matrix(camera_parameters, homography)
# project cube or model
frame = render(frame, obj, projection, model, False)
#frame = render(frame, model, projection)
except:
pass
# draw first 10 matches.
if args.matches:
frame = cv2.drawMatches(model, kp_model, frame, kp_frame, matches[:10], 0, flags=2)
# show result
cv2.imshow('frame', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
else:
print ("Not enough matches found - %d/%d" % (len(matches), MIN_MATCHES))
cap.release()
cv2.destroyAllWindows()
return 0
def render(img, obj, projection, model, color=False):
"""
Render a loaded obj model into the current video frame
"""
vertices = obj.vertices
scale_matrix = np.eye(5) *5
h, w = model.shape
for face in obj.faces:
face_vertices = face[0]
points = np.array([vertices[vertex - 1] for vertex in face_vertices])
points = np.dot(points, scale_matrix)
# render model in the middle of the reference surface. To do so,
# model points must be displaced
points = np.array([[p[0] + w / 2, p[1] + h / 2, p[2]] for p in points])
dst = cv2.perspectiveTransform(points.reshape(-1, 1, 3), projection)
imgpts = np.int32(dst)
if color is False:
cv2.fillConvexPoly(img, imgpts, (137, 27, 211))
else:
color = hex_to_rgb(face[-1])
color = color[::-1] # reverse
cv2.fillConvexPoly(img, imgpts, color)
return img
def projection_matrix(camera_parameters, homography):
"""
From the camera calibration matrix and the estimated homography
compute the 3D projection matrix
"""
# Compute rotation along the x and y axis as well as the translation
homography = homography * (-1)
rot_and_transl = np.dot(np.linalg.inv(camera_parameters), homography)
col_1 = rot_and_transl[:, 0]
col_2 = rot_and_transl[:, 1]
col_3 = rot_and_transl[:, 2]
# normalise vectors
l = math.sqrt(np.linalg.norm(col_1, 2) * np.linalg.norm(col_2, 2))
rot_1 = col_1 / l
rot_2 = col_2 / l
translation = col_3 / l
# compute the orthonormal basis
c = rot_1 + rot_2
p = np.cross(rot_1, rot_2)
d = np.cross(c, p)
rot_1 = np.dot(c / np.linalg.norm(c, 2) + d / np.linalg.norm(d, 2), 1 / math.sqrt(2))
rot_2 = np.dot(c / np.linalg.norm(c, 2) - d / np.linalg.norm(d, 2), 1 / math.sqrt(2))
rot_3 = np.cross(rot_1, rot_2)
# finally, compute the 3D projection matrix from the model to the current frame
projection = np.stack((rot_1, rot_2, rot_3, translation)).T
return np.dot(camera_parameters, projection)
def hex_to_rgb(hex_color):
"""
Helper function to convert hex strings to RGB
"""
hex_color = hex_color.lstrip('#')
h_len = len(hex_color)
return tuple(int(hex_color[i:i + h_len // 3], 16) for i in range(0, h_len, h_len // 3))
# Command line argument parsing
# NOT ALL OF THEM ARE SUPPORTED YET
parser = argparse.ArgumentParser(description='Augmented reality application')
parser.add_argument('-r','--rectangle', help = 'draw rectangle delimiting target surface on frame', action = 'store_true')
parser.add_argument('-mk','--model_keypoints', help = 'draw model keypoints', action = 'store_true')
parser.add_argument('-fk','--frame_keypoints', help = 'draw frame keypoints', action = 'store_true')
parser.add_argument('-ma','--matches', help = 'draw matches between keypoints', action = 'store_true')
# TODO jgallostraa -> add support for model specification
#parser.add_argument('-mo','--model', help = 'Specify model to be projected', action = 'store_true')
args = parser.parse_args()
if __name__ == '__main__':
main()
objloader_simple.py
class OBJ:
def __init__(self, filename, swapyz=False):
"""Loads a Wavefront OBJ file. """
self.vertices = []
self.normals = []
self.texcoords = []
self.faces = []
material = None
for line in open(filename, "r"):
if line.startswith('#'): continue
values = line.split()
if not values: continue
if values[0] == 'v':
v = list(map(float, values[1:4]))
if swapyz:
v = v[0], v[2], v[1]
self.vertices.append(v)
elif values[0] == 'vn':
v = list(map(float, values[1:4]))
if swapyz:
v = v[0], v[2], v[1]
self.normals.append(v)
elif values[0] == 'vt':
self.texcoords.append(map(float, values[1:3]))
#elif values[0] in ('usemtl', 'usemat'):
#material = values[1]
#elif values[0] == 'mtllib':
#self.mtl = MTL(values[1])
elif values[0] == 'f':
face = []
texcoords = []
norms = []
for v in values[1:]:
w = v.split('/')
face.append(int(w[0]))
if len(w) >= 2 and len(w[1]) > 0:
texcoords.append(int(w[1]))
else:
texcoords.append(0)
if len(w) >= 3 and len(w[2]) > 0:
norms.append(int(w[2]))
else:
norms.append(0)
#self.faces.append((face, norms, texcoords, material))
self.faces.append((face, norms, texcoords))
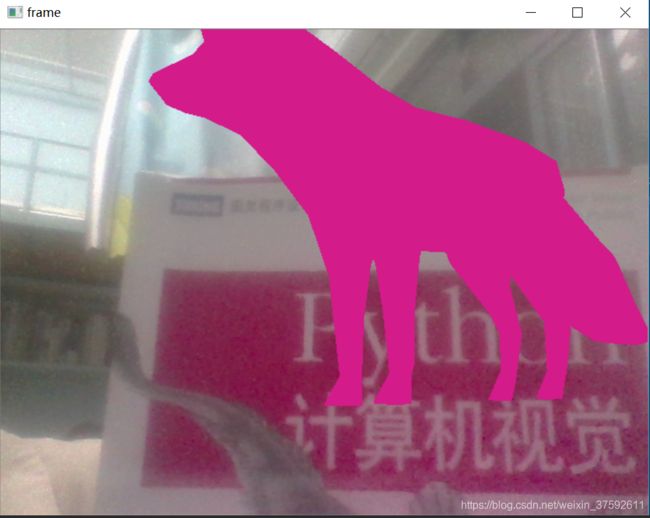
这是其中一帧的图像