51单片机(八).单片机的I2C与串口通讯
STC89C52的I2C与串口通信
I2C总线
单片机电路中的I2C总线(Inter Integrated Circuit Bus)是一种Philips公司推行的串行总线标准。连接在总线上的外设通过总线寻址,是具有总线仲裁和高低速设备同步等功能的高性能多主机总线。
I2C总线的工作原理
1、总线由串行数据线SDA和串行时钟线SCL构成,可发送和接受数据。
2、所有连接在I2C总线上的器件和接口电路都必须具有I2C总线接口,且所有的SDL/SCL同名端相互连接。
3、在总线上各个I2C设备之间依靠SDA发送的地址信息进行寻址。
I2C总线的特点
组成I2C系统的电路结构简单(两根线)、占用空间小、可以降低芯片的引脚数量、允许若干兼容器件共享总线。总线长度可达7.6m,传送速度可达400Kbps,标准速率100Kbps。支持多主控器件(某一时刻只能有一个主控器件)。需要注意的是:I2C线上的所有设备SDA、SCL引脚必须要外接上拉电阻(电阻值的大小会影响通信)。
I2C总线结构示意图

I2C总线器件寻址方式
I2C总线上的主器件在进行数据传输前需要通过寻址,选择需要进行通信的从器件。总线上所有外围器件都必须要有唯一的7位地址,由器件地址和引脚地址两部分组成。
器件地址是I2C器件固有的编码地址,器件出厂时已经给定不可更改。
引脚地址由I2C总线外设的地址引脚决定(A2、A1、A0),根据其在电路中的正负极或悬空等状态,形成不同的地址代码。(内部电路)
51单片机模拟I2C总线协议
在实际应用中,往往遇到所使用的单片机没有I2C总线接口,例如典型的51系列单片机。为了让此类单片机用于操作 I2C总线器件的能力,需要在程序模拟I2C总线数据传输协议。
I2C总线通信时序图

起始信号用于开启I2C总线的通信。其中,起始信号是在时钟线SCL为高电平期间,数据SDA上高电平向低电平变化的下降沿信号。起始信号出现以后,才可以进行后续的I2C总线寻址或数据传输;
终止信号用于终止I2C总线的通信。其中,终止信号是在时钟线SCL为高电平期间,数据线SDA上低电平到高电平变化的上升沿信号。终止信号一出现,所有I2C总线操作都结束,并释放总线控制权;
应答信号用于表明I2C总线数据传输的结束。 I2C总线数据传送时, 一个字节数据传送完毕后都必须由主器件产生应答信号。主器件在第9个时钟位上释放数据总线SDA,使其处于高电平状态,此时从器件输出低电平拉低数据总线SDA为应答信号。

I2C总线传送格式
I2C总线的传送格式为主从式,对系统中的某一器件来说有四种工作方式: 主发送方式、从发送方式、主接收方式、从接收方式。
单片机发送 24C02(存储芯片)接收:主器件产生开始信号以后,发送的第一个字节为控制字节。前七位为从器件的地址片选信号。最低位为数据传送方向位(高电平表示读从器件,低电平表示写从器件),然后发送一个选择从器件片内地址的字节,来决定开始读写数据的起始地址。接着再发送数据字节,可以是单字节数据,也可以是一组数据,由主器件来决定。从器件每接收到一个字节以后,都要返回一个应答信号(ASK=0)。主器件在应答时钟周期高电平期间释放SDA线,转由从器件控制,从器件在这个时钟周期的高电平期间必须拉低SDA线,并使之为稳定的低电平,作为有效的应答信号。
I2C总线应用实例
1、24C02存储芯片的使用
#include 2、AD数模转换的使用
#include 3、DA模数转换的使用
#include 串口通讯
串口通信传输方向
1、单工:单工是指数据传输仅能沿一个方向进行。
2、半双工:半双工是指数据传输可以沿两个方向,但需要分时进行。
3、全双工:全双工是指数据可以同时进行双向传输
串口通信奇偶校验
如约定采用奇校验:发送数据时,数据位尾随1位奇校验位,奇校验 位可以取0或1,但要保证,数据中“1”的个数与校验位“1”的个数之和 应为奇数;接收数据时,检查数据中“1”的个数与校验位“1”的个数之 和是否仍应为奇数,如不是,则说明数据在传输过程中出现了差错。
如约定采用偶校验:发送数据时,数据位尾随1位偶校验位,偶校验 位可以取0或1,但要保证,数据中“1”的个数与校验位“1”的个数之和 应为偶数;接收数据时,检查数据中“1”的个数与校验位“1”的个数之 和是否仍应为偶数,如不是,则说明数据在传输过程中出现了差错。
串口通信数据传输率
简称数传率,指单位时间内传输的信息量,可用比特率和波特率来表示。
⑴、比特率:是数字信号的传输速率,它用单位时间内传输的二进制代码的有效位(bit)数来表示,其单位为每秒比特数bit/s(bps) 。
⑵、波特率:波特率指数据信号对载波的调制速率,它用单位时间内载波调制状态改变次数来表示,其单位为波特(Baud)。
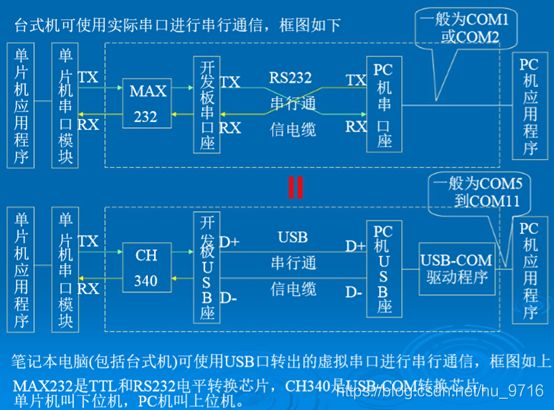
对于串行通信来说,或者说是对于普通的数字电路来说,都是两相调制,也就是单个调制状态对应1个二进制位,因此: 比特率= 波特率 1bps=1 Baud 计算机中常用的波特率是:110、300、600、1200、2400、4800、9600、 19200、28800、33600,目前最高可达56Kbps. CH340转出的虚拟串口的波特率突破了传统串口的56Kbps限制,最高可达 2Mbps。
串行通信结构框图
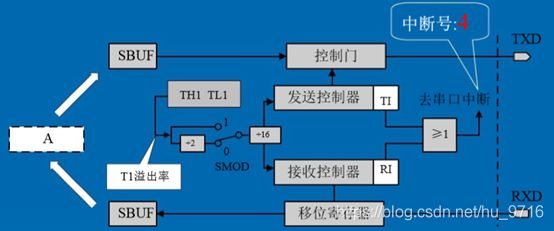
51串口模块结构图
单片机串口初始化步骤
1、TX设置为输出、RX设置为输入,也可不设置,采用默认的准双向口模式。
2、设置串口1 的工作模式,SCON 寄存器中的SM0 和SM1 两位决定了串口1 的4 种工作模式。
3、如要串口1 接收,将SCON 寄存器中的REN 位置1 即可。
4、计算BRT的值,并置数;
5、设置独立波特率发生器相关位:BRTx12:=0, S1BRS: =1, SMOD
6、启动独立波特率发生器( BRTR =1);
7、串行口工作在中断方式时,还要设置串口1 的中断优先级 ( PS,PSH ),如果不设置的话,默认是低优先级;打开中断相应的 控制位(ES,EA)。接收完成标志RI,发送完成标志TI,要由软件清0。
单片机串口通信应用实例
1、接收数据
#include 2、发送数据
#include