嵌入式知识-ARM裸机-学习笔记(11):I2C总线通信
嵌入式知识-ARM裸机-学习笔记(11):I2C总线通信
一、I2C总线
1. I2C总线简介
I2C(Inter-Integrated Circuit)总线是由Philips公司开发的一种简单、双向二线制同步串行总线。它只需要两根线即可在连接于总线上的器件之间传送信息。
主器件用于启动总线传送数据,并产生时钟以开放传送的器件,此时任何被寻址的器件均被认为是从器件。在总线上主和从、发和收的关系不是恒定的,而取决于此时数据传送方向。如果主机要发送数据给从器件,则主机首先寻址从器件,然后主动发送数据至从器件,最后由主机终止数据传送;如果主机要接收从器件的数据,首先由主器件寻址从器件,然后主机接收从器件发送的数据,最后由主机终止接收过程。
2. I2C物理接口
物理接口:SCL + SDA(只需要用2根线就可以进行复杂的通信)
(1)SCL(serial clock):时钟线,传输CLK信号,一般是I2C主设备向从设备提供时钟的通道。
(2)SDA(serial data): 数据线,通信数据都通过SDA线传输。
3. I2C通信特征
I2C通信是一种串行、同步、非差分、低速率的通信方式。
(1)串行:I2C属于串行通信,所有的数据以位为单位在SDA线上串行传输。
(2)同步:同步通信就是通信双方工作在同一个时钟下,一般是通信的A方通过一根CLK信号线传输A自己的时钟给B,B工作在A传输的时钟下。所以同步通信的显著特征就是:通信线中有CLK。
(3)非差分:因为I2C通信速率不高,而且通信双方距离很近,所以使用电平信号通信。
(4)低速率:I2C一般是用在同一个板子上的2个IC之间的通信,而且用来传输的数据量不大,所以本身通信速率很低(一般几百KHz,不同的I2C芯片的通信速率可能不同,具体在编程的时候要看自己所使用的设备允许的I2C通信最高速率,不能超过这个速率)。
主设备+从设备
I2C通信的时候,通信双方地位是不对等的,而是分主设备和从设备。通信由主设备发起,由主设备主导,从设备只是按照I2C协议被动的接受主设备的通信,并及时响应。
谁是主设备、谁是从设备是由通信双方来定的(I2C协议并无规定),一般来说一个芯片可以只能做主设备、也可以只能做从设备、也可以既能当主设备又能当从设备(但是不能同时当两个)。
可以多个设备挂在一条总线上(从设备地址)
I2C通信可以一对一(1个主设备对1个从设备),也可以一对多(1个主设备对多个从设备)。
主设备来负责调度总线,决定某一时间和哪个从设备通信。注意:同一时间内,I2C的总线上只能传输一对设备的通信信息,所以同一时间只能有一个从设备和主设备通信,其他从设备处于“冬眠”状态,不能出来捣乱,否则通信就乱套了。
每一个I2C从设备在通信中都有一个I2C从设备地址,这个设备地址是从设备本身固有的属性,然后通信时主设备需要知道自己将要通信的那个从设备的地址,然后在通信中通过地址来判断是不是自己要找的那个从设备。(这个地址是一个电路板上唯一的,不是全球唯一的)。
4. I2C总线通信时序
从字面意思解释,时序就是时间顺序,实际上在通信中时序就是通信线上按照时间顺序发生的电平变化,以及这些变化对通信的意义就叫时序。
I2C的总线空闲状态、起始位、结束位
I2C总线上有1个主设备,n(n>=1)个从设备。I2C总线上有2种状态;空闲态(所有从设备都未和主设备通信,此时总线空闲)和忙态(其中一个从设备在和主设备通信,此时总线被这一对占用,其他从设备必须歇着)。整个通信分为一个周期一个周期的,两个相邻的通信周期是空闲态。每一个通信周期由一个起始位开始,一个结束位结束,中间是本周期的通信数据。

起始位并不是一个时间点,起始位是一个时间段,在这段时间内总线状态变化情况是:CLK线维持高电平,同时SDA线发生一个从高到低的下降沿。
与起始位相似,结束位也是一个时间段。在这段时间内总线状态变化情况是:SCL线维持高电平,同时SDA线发生一个从低到高的上升沿。
在起始位的下一个时钟的上升沿会发生一个数据的传输,必须在上升沿来临之前使其稳定。数据传输过程中,数据线从0变为1时,一定要在下一个上升沿来到之前完成。
5. I2C数据传输格式
每一个通信周期的发起和结束都是由主设备来做的,从设备只有被动的响应主设备,没法自己自发的去做任何事情。主设备在每个通信周期会先发8位的从设备地址(其实8位中只有7位是从设备地址,还有1位表示主设备下面要写入还是读出)到总线(主设备是以广播的形式发送的,只要是总线上的所有从设备其实都能收到这个信息)。然后总线上的每个从设备都能收到这个地址,并且收到地址后和自己的设备地址比较看是否相等。如果相等说明主设备本次通信就是给我说话,如果不想等说明这次通信与我无关,不用听了不管了。
发送方发送一段数据后,接收方需要回应一个ACK。这个响应本身只有1个bit位,不能携带有效信息,只能表示2个意思(要么表示收到数据,即有效响应;要么表示未收到数据,无效响应)。
在某一个通信时刻,主设备和从设备只能有一个在发(占用总线,也就是向总线写),另一个在收(从总线读)。如果在某个时间主设备和从设备都试图向总线写那就完蛋了,通信就乱套了。
下图为输出传输格式:

其中白色为主设备对从设备,灰色部分为从设备对主设备。
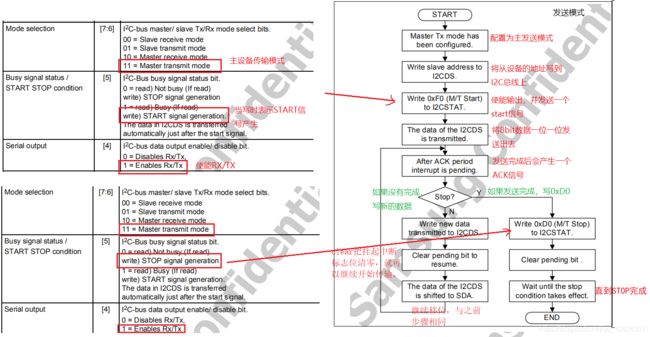
当写模式时的情况:首先由主设备发送一个起始信号,紧接着在下一个时钟上升沿来临时,将从设备的地址通过总线发送出去(其中7位为地址数据,1位表示写模式),总线上的各从设备接收到地址后与自己的地址相对比,如果对应则被选中,那么从设备会发送一个ACK信号告诉主设备准备完毕,主设备发送8 bit的数据,从设备接收到该数据后会发送一个ACK信号,之后由主设备发送停止信号标志着传输完成。
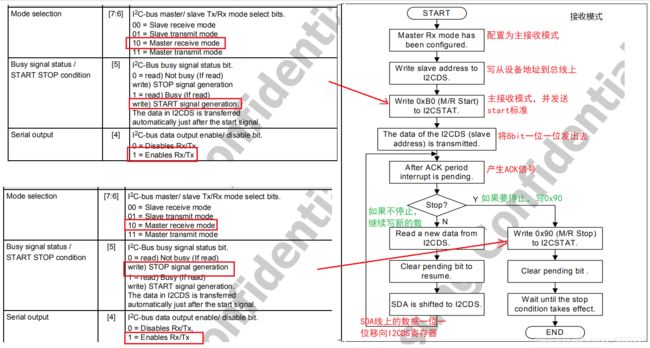
当读模式时的情况:首先由主设备发送一个起始信号,紧接着在下一个时钟上升沿来临时,将从设备的地址通过总线发送出去(其中7位为地址数据,1位表示读模式),总线上的各从设备接收到地址后与自己的地址相对比,如果对应则被选中,那么从设备会发送一个ACK信号告诉主设备准备完毕,然后从设备开始发送8bit的数据,主设备收到之后会发送一个ACK信号,然后再发送停止信号标志结束。

I2C通信时的基本数据单位也是以字节为单位的,每次传输的有效数据都是1个字节(8位)。
起始位及其后的8个clk中都是主设备在发送(这设备掌控总线),此时从设备只能读取总线,通过读总线来得知主设备发给从设备的信息;然后到了第9周期,按照协议规定从设备需要发送ACK给主设备,所以此时主设备必须释放总线(主设备把总线置为高电平然后不要动,其实就类似于总线空闲状态),同时从设备试图拉低总线发出ACK。如果从设备拉低总线失败,或者从设备根本就没有拉低总线,则主设备看到的现象就是总线在第9周期仍然一直保持高,这对主设备来说,意味着我没收到ACK,主设备就认为刚才给从设备发送的8字节不对(接收失败)。
二、S5PV210的I2C总线
1. I2C控制器
主从设备通信双方本质上是通过时序在工作,但是时序会比较复杂不利于SoC软件完成,于是乎解决方案是SoC内部内置了硬件的控制器来产生通信时序。这样我们写软件时只需要向控制器的寄存器中写入配置值即可,控制器会产生适当的时序在通信线上和对方通信。

(1)时钟来源是PCLK_PSYS(65MHz),经过内部2级分频最终得到I2C控制器的CLK。第一级分频是I2CCON的bit6,可以得到一个中间时钟I2CCLK(等于PCLK/16或者PCLK/512);第二级分频是得到最终I2C控制器工作的时钟,以I2CCLK这个中间时钟为来源,分频系数为[1,16],因为是4bit(相当于0~15加1)。最终要得到时钟是2级分频后的时钟,譬如一个可用的设置是:65000KHz/512/4=31KHz通信中这个CLK会通过SCL线传给从设备。
(2)I2C总线控制逻辑(前台代表是I2CCON、I2CSTAT这两个寄存器),主要负责产生I2C通信时序。实际编程中要发送起始位、停止位、接收ACK等都是通过这两个寄存器(背后所代表的电路模块)实现的。
(3)移位寄存器(shift register),将代码中要发送的字节数据,通过移位寄存器变成1个位一个位的丢给SDA线上去发送/接收。
地址寄存器+比较器。本I2C控制器做从设备的时候用。
(4)I2CADD:用来写自己的slave address。
(5)I2CDS:发送/接收的数据都放在这里。
2. 总线通信流程
主设备收/发模式
这里要补充一点:就是在发送8bit地址数据时,其实是7bit地址+1bit的方向。
举个例子:
KXTE9的I2C地址固定为0b0001111,I2C从设备地址本身是7位的,但是在I2C通信中发送I2C从设备地址时实际发送的是8位,这8位中高7位(bit7-bit1)对应I2C从设备的7位地址,最低一位(LSB)存放的是R/W信息(就是说下一个数据是主设备写从设备读(对应0),还是主设备读从设备写(对应1))。因此,对于KXTE9来说,主设备(SoC)发给gsensor信息时,SAD应该是:0b00011110(0x1E),而主设备读取gsensor信息时,则应该是0b00011111(0x1F)。