基于Python的K邻近分类法(KNN)+ 稠密SIFT + 手势识别
一、KNN原理分析
在分类方法中,最简单也用的最多的就是KNN(K邻近分类法)算法。这种算法把要分类的对象与训练集中,已知类标记的所有对象进行对比,并由k近邻对指派到哪一类进行投票。
这种方法通常分类效果很好,但也有很多弊端,例如:与K-menas聚类算法类似,需要预先设定k值,k值的选择会影响分类的性能。而且,这种方法要求整个训练集存储起来,如果训练集非常大时,就会出现搜索速度慢的现象。
二、用K邻近分类器分类二维数据
1、创建二维点集
通过随机生成的方式,创建两个不同的二维点集,每个点集有两类,分别是正态分布和绕环状分布,然后用Pickle模块保存数据集。二维点集的大小主要通过代码中参数的调节实现,该参数越大,数据点范围越大,就会比较分散。

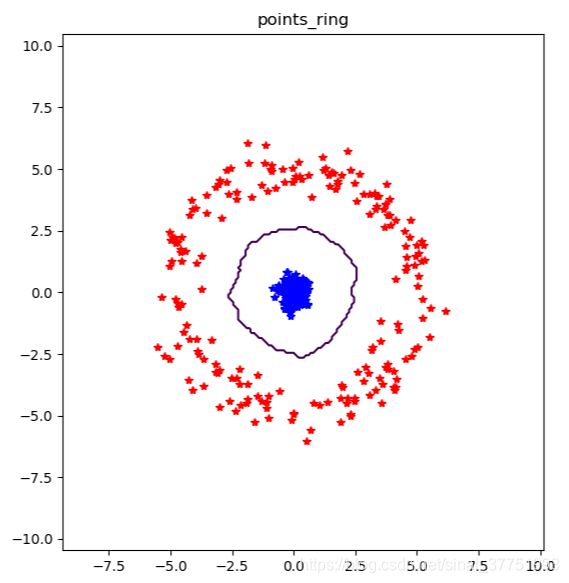
数据在绕环状分布时,半径r决定了外圈数据集的集中程度,当r越大时,数据范围越大,也就越分散。
# -*- coding: utf-8 -*-
from numpy.random import randn
import pickle
from pylab import *
#创建二维样本数据
n = 200
# 两个正态分布数据集
class_1 = 1 * randn(n,2)
class_2 = 1.5 * randn(n,2) + array([5,1])
labels = hstack((ones(n),-ones(n)))
# 用Pickle模块保存
#with open('points_normal.pkl', 'w') as f:
with open('points_normal_test.pkl', 'wb') as f:
pickle.dump(class_1,f)
pickle.dump(class_2,f)
pickle.dump(labels,f)
# 正太分布,并使数据成环绕状分布
print ("save OK!")
class_1 = 0.3 * randn(n,2)
r = 0.5 * randn(n,1) + 5
angle = 2*pi * randn(n,1)
class_2 = hstack((r*cos(angle),r*sin(angle)))
labels = hstack((ones(n),-ones(n)))
# 用Pickle保存
#with open('points_ring.pkl', 'w') as f:
with open('points_ring_test.pkl', 'wb') as f:
pickle.dump(class_1,f)
pickle.dump(class_2,f)
pickle.dump(labels,f)
print ("save OK!")
保存成功后,在控制台输出如下:
2、创建KNN分类器
用Pickle模块载入之前创建的数据集,从而来创建一个KNN分类器模型。为可视化所有测试数据点的分类,并展示分类器如何将两个不同的类分开,就需要创建一个辅助函数classify(x,y,model=model),以获取x和y二维坐标数组和分类器,并且返回一个预测的类标记数组array。然后把函数classify作为参数传递给实际的绘图函数plot_2D_boundary。
这个绘图函数需要一个决策函数(分类器),并且用meshgrid()函数在一个网格上进行预测,网格的精度为0.1,每隔0.1采集一个点。决策函数的等值线可以显示边界的位置,默认边界为零等值线。对于每一个类,用*画出分类正确的类,用O画出分类不正确的点。
# -*- coding: utf-8 -*-
import pickle
from pylab import *
from PCV.classifiers import knn
from PCV.tools import imtools
pklist=['points_normal.pkl','points_ring.pkl']
figure()
# 用Pickle载入二维数据点
for i, pklfile in enumerate(pklist):
with open(pklfile, 'rb') as f:
class_1 = pickle.load(f)
class_2 = pickle.load(f)
labels = pickle.load(f)
# 用Pickle模块载入测试数据
with open(pklfile[:-4]+'_test.pkl', 'rb') as f:
class_1 = pickle.load(f)
class_2 = pickle.load(f)
labels = pickle.load(f)
model = knn.KnnClassifier(labels,vstack((class_1,class_2)))
# 在测试数据集的第一个数据点上进行测试
print (model.classify(class_1[0]))
# 定义绘图函数
def classify(x,y,model=model):
return array([model.classify([xx,yy]) for (xx,yy) in zip(x,y)])
# 绘制分类边界
subplot(1,2,i+1)
imtools.plot_2D_boundary([-6,6,-6,6],[class_1,class_2],classify,[1,-1])
titlename=pklfile[:-4]
title(titlename)
show()
imtools函数:
def plot_2D_boundary(plot_range,points,decisionfcn,labels,values=[0]):
""" Plot_range为(xmin,xmax,ymin,ymax), points是类数据点列表, decisionfcn is a funtion to evaluate,
是评估函数,labels是函数 decisionfcn 关于每一个类返回值的标记列表. """
clist = ['b','r','g','k','m','y'] # 不同的类用不同的颜色标识
# 在一个网格上进行评估,并画出决策函数的边界
x = arange(plot_range[0],plot_range[1],.1)
y = arange(plot_range[2],plot_range[3],.1)
xx,yy = meshgrid(x,y)
xxx,yyy = xx.flatten(),yy.flatten() # 网格中的x,y坐标点列表
zz = array(decisionfcn(xxx,yyy))
zz = zz.reshape(xx.shape)
# 以values画出边界
contour(xx,yy,zz,values)
# 对于每类,用 '*' 画出分类正确的点,用 'o'画出分类不正确的点
for i in range(len(points)):
d = decisionfcn(points[i][:,0],points[i][:,1])
correct_ndx = labels[i]==d
incorrect_ndx = labels[i]!=d
plot(points[i][correct_ndx,0],points[i][correct_ndx,1],'*',color=clist[i])
plot(points[i][incorrect_ndx,0],points[i][incorrect_ndx,1],'o',color=clist[i])
axis('equal')
3、结果分析
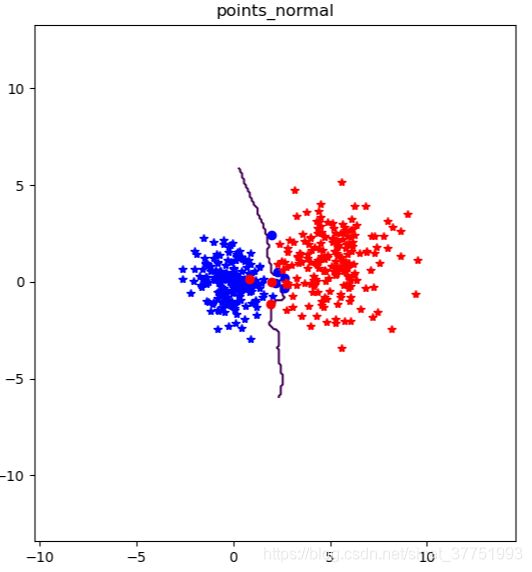
(1)改变正态分布数据集的参数
修改参数前的数据集进行分类

结果如下:
调节参数后

分类结果如下:
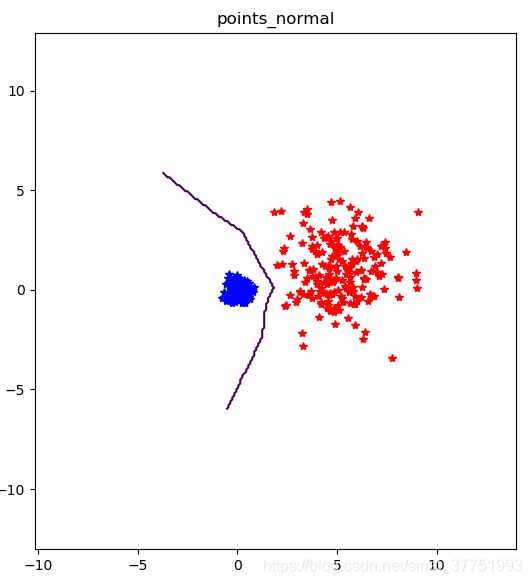
分析:通过比较左侧的图看出,修改参数之前的数据集下,由于两个数据集的范围都比较大,就有可能出现了相同的数据点,给分类造成了干扰,无法进行分类,从而用原点标记出这几个错误的点。而在修改参数后的数据集下,两个数据集的范围相差较大,从而产生的数据点相差的比较大, 从而分类器能够较好的进行分类。
(2)改变环绕状数据集的参数
修改参数前的数据集进行分类
结果如下:
修改参数后的数据集进行分类
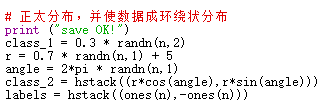
结果如下:
分析:由于半径变大,从而使外圈的数据集更加分散,从而更加靠近中间的内圈的数据集
二、Dense SIFT
1、原理分析
Dense-SIFT是sift的密集采样板,由于SIFT的实时性差,目前特征提取多采用密集采样。传统的SIFT算法即Sparse SIFT,不能很好地表征不同类之间的特征差异,达不到所需的分类要求。而Dense SIFT算法,是一种对输入图像进行分块处理,再进行SIFT运算的特征提取过程。Dense SIFT根据可调的参数大小,来适当满足不同分类任务下对图像的特征表征能力。通常来讲Dense SIFT更适用于图像分类识别的任务,而Sparse SIFT更适用于图像检索分割的任务。
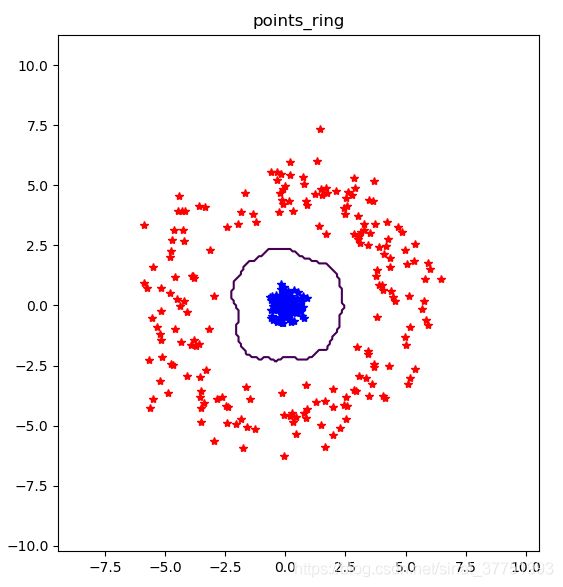
2、可视化
# -*- coding: utf-8 -*-
from PCV.localdescriptors import sift, dsift
from pylab import *
from PIL import Image
dsift.process_image_dsift('gesture/b1.jpg','b1.dsift',90,60,True)
l,d = sift.read_features_from_file('b1.dsift')
im = array(Image.open('gesture/b1.jpg'))
sift.plot_features(im,l,True)
title('dense SIFT')
show()dsift函数:
from PIL import Image
from numpy import *
import os
from PCV.localdescriptors import sift
def process_image_dsift(imagename,resultname,size=20,steps=10,force_orientation=False,resize=None):
""" 用密集采样的SIFT描述子处理一幅图像,并将结果保存在一个文件中.
可选的输入:特征的大小size,位置之间的步长steps,
是否强迫计算描述子的方位force_orientation(False表示所有的方位都是朝上的),
用于调整图像大小的元组"""
im = Image.open(imagename).convert('L')
if resize!=None:
im = im.resize(resize)
m,n = im.size
if imagename[-3:] != 'pgm':
#创建一个人pgm文件
im.save('tmp.pgm')
imagename = 'tmp.pgm'
# 创建帧,并保存到临时文件
scale = size/3.0
x,y = meshgrid(range(steps,m,steps),range(steps,n,steps))
xx,yy = x.flatten(),y.flatten()
frame = array([xx,yy,scale*ones(xx.shape[0]),zeros(xx.shape[0])])
savetxt('tmp.frame',frame.T,fmt='%03.3f')
path = os.path.abspath(os.path.join(os.path.dirname("__file__"),os.path.pardir))
path = path + "\\python3-ch08\\win32vlfeat\\sift.exe "
if force_orientation:
cmmd = str(path+imagename+" --output="+resultname+
" --read-frames=tmp.frame --orientations")
else:
cmmd = str(path+imagename+" --output="+resultname+
" --read-frames=tmp.frame")
os.system(cmmd)
print ('processed', imagename, 'to', resultname)
![]()
当 dsift.process_image_dsift('gesture/b1.jpg','b1.dsift',90,60,True)时,结果如下:
当 dsift.process_image_dsift('gesture/b1.jpg','b1.dsift',90,40,True)时,结果如下:
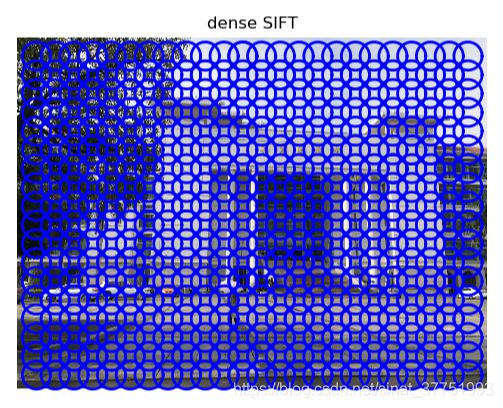
通过两幅图像的对比可以看出,当圈的大小确定时,步数越小,相邻圆圈中心点的距离就越近,整体看起来也就越密
三、手势识别
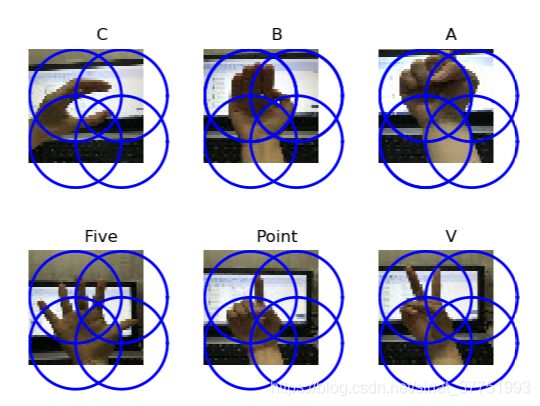
在这个应用中,我们用稠密SIFT描述子来表示这些手势图像,并建立一个简单的手势识别系统。代码会对指定的图像创建一个特征文件,文件名后缀为.dsitf。
注意!!! 这里将测试的所有图像,分辨率全部调成常见的固定大小,例如:50*50,。这是非常重要的,否则这些图像会有不同数量的描述子,从而每幅图像的特征向量长度也不一样,这将导致在后面比较它们时出错。
1、可视化带有描述子的手势图像
# -*- coding: utf-8 -*-
import os
from PCV.localdescriptors import sift, dsift
from pylab import *
from PIL import Image
imlist=['gesture/test2/C-uniform06.jpg','gesture/test2/B-uniform04.jpg',
'gesture/test2/A-uniform02.jpg','gesture/test2/Five-uniform08.jpg',
'gesture/test2/Point-uniform10.jpg','gesture/test2/V-uniform12.jpg']
figure()
for i, im in enumerate(imlist):
print (im)
dsift.process_image_dsift(im,im[:-3]+'dsift',60,20,True)
l,d = sift.read_features_from_file(im[:-3]+'dsift')
dirpath, filename=os.path.split(im)
im = array(Image.open(im))
#显示手势含义title
titlename=filename[:-14]
subplot(2,3,i+1)
sift.plot_features(im,l,True)
title(titlename)
show()
2、通过训练数据,识别手势
用训练数据及其标记作为输入,创建分类器对象,然后在整个测试集上遍历,并用classify()方法对每一幅图像进行分类。将布尔数组和1相乘并求和,可以计算出分类的正确率。
虽然正确率显示了对于给定的测试集有多少图像是正确分类的,但是它并没有告诉我们哪些手势难以分类,或者犯哪些错误。这时,我们可以通过混淆矩阵来显示错误分类的情况。混淆矩阵是一个可以显示每类有多少个样本被分在每一类中的矩阵,它可以显示错误的分布情况,以及哪些类是经常相互“混淆”的
# -*- coding: utf-8 -*-
from PCV.localdescriptors import dsift
import os
from PCV.localdescriptors import sift
from pylab import *
from PCV.classifiers import knn
def get_imagelist(path):
""" Returns a list of filenames for
all jpg images in a directory. """
return [os.path.join(path,f) for f in os.listdir(path) if f.endswith('.jpg')]
def read_gesture_features_labels(path):
# 对所有以 .dsift为后缀的文件创建一个列表
featlist = [os.path.join(path,f) for f in os.listdir(path) if f.endswith('.dsift')]
# 读取特征
features = []
for featfile in featlist:
l,d = sift.read_features_from_file(featfile)
features.append(d.flatten())
features = array(features)
# 创建标签
labels = [featfile.split('/')[-1][0] for featfile in featlist]
return features,array(labels)
def print_confusion(res,labels,classnames):
n = len(classnames)
# 混淆矩阵
class_ind = dict([(classnames[i],i) for i in range(n)])
confuse = zeros((n,n))
for i in range(len(test_labels)):
confuse[class_ind[res[i]],class_ind[test_labels[i]]] += 1
print ('Confusion matrix for')
print (classnames)
print (confuse)
filelist_train = get_imagelist('gesture/train2')
filelist_test = get_imagelist('gesture/test2')
imlist=filelist_train+filelist_test
# 将图像尺寸调成(50,50),然后进行处理
for filename in imlist:
featfile = filename[:-3]+'dsift'
#dsift.process_image_dsift(filename,featfile,10,5,resize=(50,50))
features,labels = read_gesture_features_labels('gesture/train2/')
test_features,test_labels = read_gesture_features_labels('gesture/test2/')
classnames = unique(labels)
# 测试kNN
k = 1
knn_classifier = knn.KnnClassifier(labels,features)
res = array([knn_classifier.classify(test_features[i],k) for i in
range(len(test_labels))])
# 准确率
acc = sum(1.0*(res==test_labels)) / len(test_labels)
print ('Accuracy:', acc)
print_confusion(res,test_labels,classnames)
knn函数
from numpy import *
class KnnClassifier(object):
def __init__(self,labels,samples):
""" Initialize classifier with training data. """
self.labels = labels
self.samples = samples
def classify(self,point,k=3):
""" Classify a point against k nearest
in the training data, return label. """
# compute distance to all training points
dist = array([L2dist(point,s) for s in self.samples])
# sort them
ndx = dist.argsort()
# use dictionary to store the k nearest
votes = {}
for i in range(k):
label = self.labels[ndx[i]]
votes.setdefault(label,0)
votes[label] += 1
return max(votes, key=lambda x: votes.get(x))
def L2dist(p1,p2):
return sqrt( sum( (p1-p2)**2) )
def L1dist(v1,v2):
return sum(abs(v1-v2))
(1)训练集与测试集完全相同时:
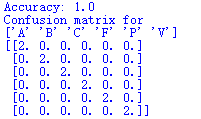
准确率为100%
识别出,每种手势各有两种,与静态数据库中一致。
(2)训练集与测试集完全不同时:
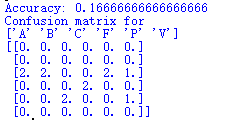
准确率只有16%
很多手势出现了分类的错误,例如:A手势识别成了C手势,B手势也识别成了C手势等
大量的分类错误,可能的原因有:1、在静态数据库下,对陌生场景下的手势,比较敏感,导致准确率较低
2、训练集较小,导致分类错误
四、解决问题
1、注意将代码中读取图像的格式,改成你们测试图像相应的后缀
![]()
2、在dsift函数中,路径要改成你们存储图像的相对路径,否则会导致.dsift文件无法生成
![]()