设备树学习之(十三)电容触摸屏驱动
开发板:tiny4412SDK + S702 + 4GB Flash
要移植的内核版本:Linux-4.4.0 (支持device tree)
u-boot版本:友善之臂自带的 U-Boot 2010.12
busybox版本:busybox 1.25
友善之臂提供的资料中,触摸屏驱动采用的是一线触控,但是保留了i2c接口,驱动芯片为FT5406,本文主要实现 i2c 接口的触摸屏驱动。
首先,分析下 FT5406 的基本电路接口:
基本都是通用的接口,如 I2C 接口,INT,WAKE,RST。如图:


以上可知,我们在驱动中必须定义一个中断口,来启动接收触摸数据,一个gpio脚来复位FT5406。wake:主要靠cpu发送一个唤醒指令给FT5406。
查看tiny4412原理图

再次,需确认FT5406的从地址,以便于I2C访问得到。这个可以根据FT5406数据手册查找到.
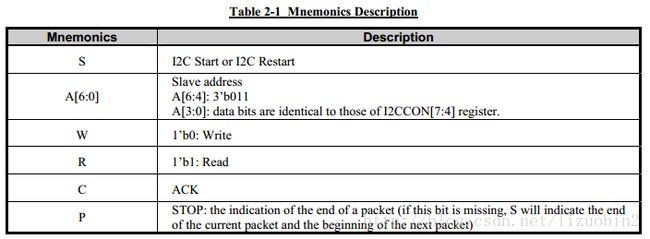
可知从地址高位必须为:3,低位必须根据 i2ccon 设定的值来确定,这点很奇怪。
我这边找到的从地址为:0x38
i2ccon 暂时未找到出处,可以用 i2c tools 探测一下
/mnt # ./i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- 38 -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- -- 基本的东西确认好后,剩下的就是根据FT5406数据手册上的指令,开始写驱动了。
在此之前,我们先了解下驱动如何实现电容屏的多点触摸,其实很简单,主要需要
触摸屏IC FT5406 能够捕获多点数据,这点电容屏基本多能支持到捕获2点以上,而FT5406 可以捕获5个触摸点,编写驱动时,只要去获取这几个点的数据,然后上报就行。格式如图:
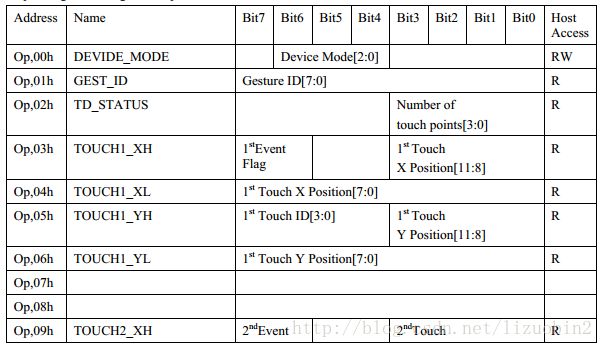
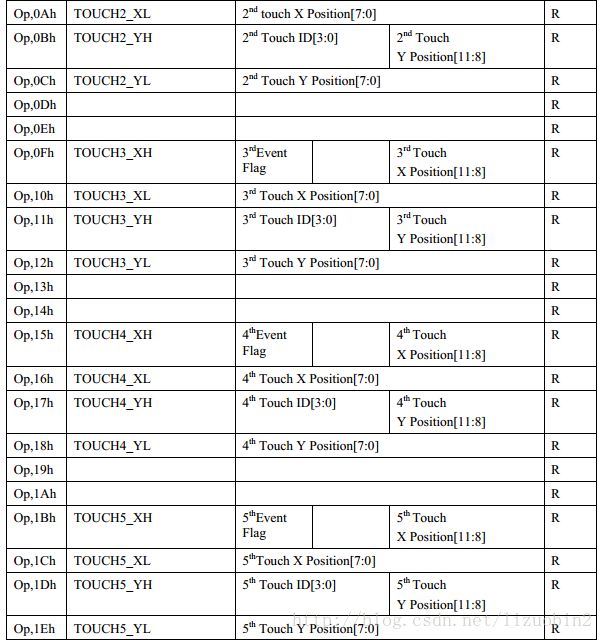
解释:
- 02h : 捕获的触摸点个数
- 03h- 1eh :对应每个点的x,y坐标数值。
- touch id 表示触点编号,对应于typeB的slot

驱动参考:Ft6236.c (drivers\input\touchscreen)
touch_demo{
compatible = "tiny4412,touch_demo";
interrupts = <6 0>;
interrupt-parent = <&gpx1>;
status = "okay";
};&i2c_1{
status = "okay";
touch@38{
compatible = "tiny4412,touch";
reg = <0x38>;
};
};#include