linux 驱动程序 设备模块 设备号 设备文件创建 设备注册 字符驱动设备分析
驱动程序分为三部分:驱动设计模式(linux规定的)内核相关模块 硬件知识 。设备文件存放目录在 /dev下面
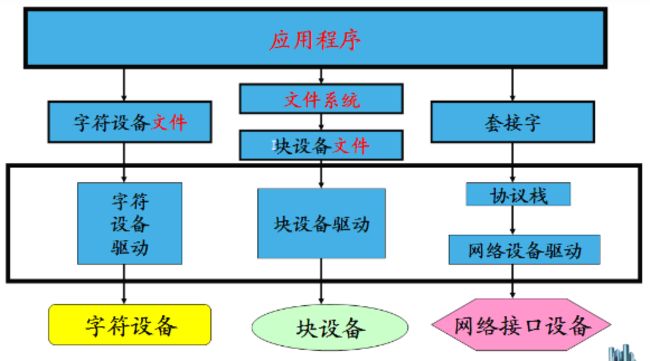
驱动模块分类:
-
字符驱动模块(高):以字节为最小访问单位,常常实现open,read,write
-
网络驱动模块:以块为最小访问单位,一般最小块512字节,可以是512字节的整数倍,但是linux允许块设备访问任意字节。
-
块设备驱动模块:网络事务
驱动模块添加方式 手动和编译进内核
-
模块手动命令添加到内核,.ko文件。insmod
-
编译进内核,
1,vi Kconfig
config HELLO (HELLO 模块名字)
bool "hello driver" (menuconfig 菜单中出现的名字)
保存,make menuconfig 就会出现新的选项 hello driver
2,vi Makefile
设备操作方式
设备号用来区分设备文件。分为主设备号和次设备号
-
主设备号:字符设备文件与字符设备驱动连接
-
次设备号:由于设备可能多个,可以用次设备号,区分哪个设备。
设备号关键字dev_t 为unsigned int 32类型, 高12位主设备号,低20位为次设备号
MAJOR(dev_t dev)可以得到主设备,MINOR(dev_t dev)得到次设备
linux如何分配主设备号 静态和动态分配
-
静态申请
开发者自己申请 register_chrdev_region函数注册设备号
优点:简单
缺点:容易重复冲突
-
动态申请
内核分配 alloc_chrdev_region函数分配
优点:易于驱动推广
缺点:无法在安装驱动前创建设备文件
注销设备号 unregister_chrdev_region()释放设备号
linux创建设备文件 手动mknod和自动class_create device_create
-
使用mknod手工创建
mknod filename type major minor
mknod serial0 c 100 0 ;创建名字为 serial0 字符设备 主设备号100,次设备号0
-
自动创建
利用udev(mdev)来实现设备文件的自动创建,首先应保证支持udev(mdev),由busybox配置。在驱动初始
化代码里调用class_create为该设备创建一个class,再为每个设备调用device_create创建对应的设备。
设备操作中几个重要结构
-
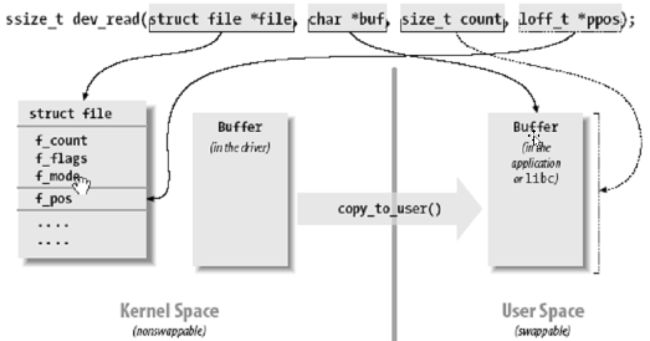
Struct File;代表一个打开的文件,系统每打开一个文件就关联一个struct file,文件关闭时释放
-
loff_t f_pos ;文件读写位置,文件读写指针位置是变化的
struct file_operations *f_op ;操作函数指针的集合,.参数:指针指向后面的函数 用于 用户空间与驱动程序进行通信
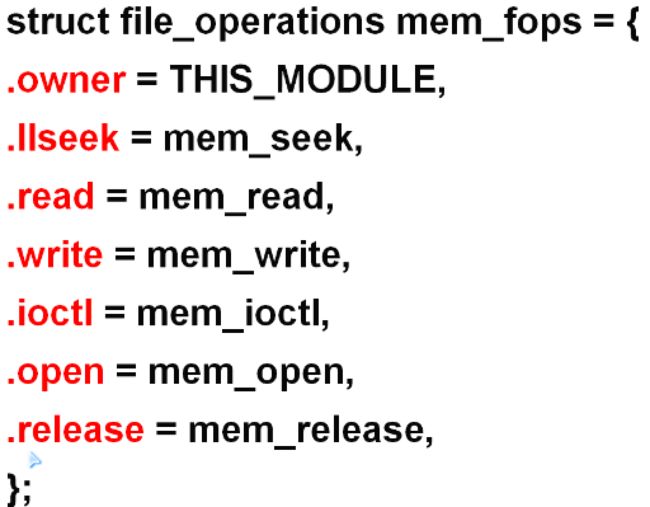
内核操作使用上面变量时,就会给.owner 的THIS_MODULE加1。引用计数,可以通过lsmod 查看。只有模块计数为 0,才可以卸载模块
上面函数名字可以随便起;mem_read但是函数参数不能改,如
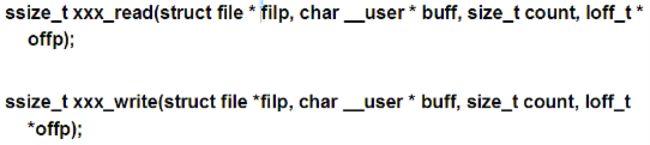
参数第一个是文件指针fd,第二个缓存,第三个是个数,第四个是文件位置
-
Struct Inode :文件记录了设备信息,一个文件一个Inode
设备注册 步骤
字符设备使用struct cdev描述
-
分配cdev空间,使用指针时需要 struct cdev *cdev_alloc(void)分配内存
-
初始化cdev。cdev_init(cdev,ops);
-
内核添加cdev。cdev_add(设备结构,设备号,设备个数),设备文件与设备号连接起来了
-
设备注销 cdev_del(struct cdev *p);
内核与用户空间指针进行传值的专门函数copy_from_user(),copy_to_user(),他们之间不能直接传值
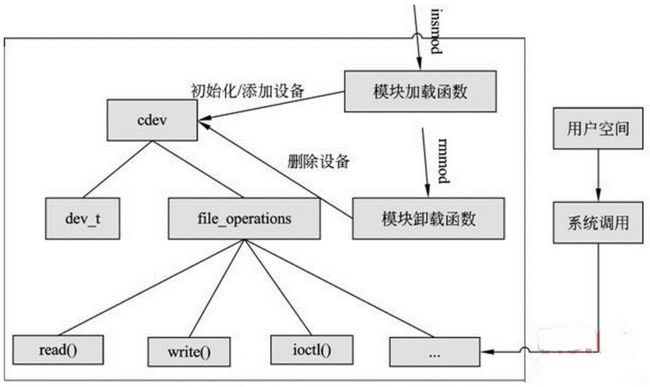
设备添加/卸载的结构图
例子
/*********************************************/
#ifndef _MEMDEV_H_
#define _MEMDEV_H_
#ifndef MEMDEV_MAJOR
#define MEMDEV_MAJOR 190 /*预设的mem的主设备号*/
#endif
#ifndef MEMDEV_NR_DEVS
#define MEMDEV_NR_DEVS 2 /*设备数*/
#endif
#ifndef MEMDEV_SIZE
#define MEMDEV_SIZE 4096//分配内存的大小
#endif
/*mem设备描述结构体*/
struct mem_dev
{
char *data; //分配到的内存的起始地址
unsigned long size; //内存的大小
};
#endif /* _MEMDEV_H_ */
/*********************************************/dev.c
#include Makefile
ifneq ($(KERNELRELEASE),)
obj-m := memdev.o
else
KDIR := /forlinux/linux-3.0.1
all:
make -C $(KDIR) M=$(PWD) modules ARCH=arm CROSS_COMPILE=arm-linux-
clean:
rm -f *.ko *.o *.mod.o *.mod.c *.symvers
endif测试程序
#include 1,将编译的.ko和app都下载到开发板
2,加载模块.ko insmod memdev.ko
3,创建设备文件 手动创建过程 (动态分配时:设备号查看 cat /proc/devices 安装设备就会在该目录下出现相应的设备和设备号)
cd /dev
mknod memdev0 c 190 0 (设备号要对应起来 运行这个后 会在/dev目录下创建相应的文件)
4,让后去运行app文件 ./memapp