1.各种边缘检测算子:
a.Sobel 检测算子

该算子中引入了类似局部平均的运算,因此对噪声具有平滑作用,能很好的消除噪声的影响。
b. Roberts 算子:.


没有经过图像平滑处理的,因此图像噪声一般得不到很好的抑制
Roberts 算子的定位精度较高,对具有陡峭的低噪声图像
c Prewitt算子

在边缘处达到极值检测边缘,去掉部分伪边缘,对噪声具有平滑作用
d.Laplacian算子

Laplace算子对孤立象素的响应要比对边缘或线的响应要更强烈,因此只适用于无噪声图象。存在噪声情况下,使用Laplacian算子检测边缘之前需要先进行低通滤波。
e.Canny算子
step1: 用高斯滤波器平滑图象;
step2: 用一阶偏导的有限差分来计算梯度的幅值和方向;
step3: 对梯度幅值进行非极大值抑制
step4: 用双阈值算法检测和连接边缘
2. 各种特征提取:
1.HOG
1)灰度化(将图像看做一个x,y,z(灰度)的三维图像);
2)采用Gamma校正法对输入图像进行颜色空间的标准化(归一化);目的是调节图像的对比度,降低图像局部的阴影和光照变化所造成的影响,同时可以抑制噪音的干扰;
3)计算图像每个像素的梯度(包括大小和方向);主要是为了捕获轮廓信息,同时进一步弱化光照的干扰。
4)将图像划分成小cells(例如6*6像素/cell);
5)统计每个cell的梯度直方图(不同梯度的个数),即可形成每个cell的descriptor;
6)将每几个cell组成一个block(例如3*3个cell/block),一个block内所有cell的特征descriptor串联起来便得到该block的HOG特征descriptor。
7)将图像image内的所有block的HOG特征descriptor串联起来就可以得到该image(你要检测的目标)的HOG特征descriptor了。这个就是最终的可供分类使用的特征向量了。
对于64*128的图像而言,每16*16的像素组成一个cell,每2*2个cell组成一个块,因为每个cell有9个特征,所以每个块内有4*9=36个特征,以8个像素为步长,那么,水平方向将有7个扫描窗口,垂直方向将有15个扫描窗口。也就是说,64*128的图片,总共有36*7*15=3780个特征。
LBP特征

1)首先将检测窗口划分为16×16的小区域(cell);
(2)对于每个cell中的一个像素,将相邻的8个像素的灰度值与其进行比较,若周围像素值大于中心像素值,则该像素点的位置被标记为1,否则为0。这样,3*3邻域内的8个点经比较可产生8位二进制数,即得到该窗口中心像素点的LBP值;
(3)然后计算每个cell的直方图,即每个数字(假定是十进制数LBP值)出现的频率;然后对该直方图进行归一化处理。
(4)最后将得到的每个cell的统计直方图进行连接成为一个特征向量,也就是整幅图的LBP纹理特征向量;
然后便可利用SVM或者其他机器学习算法进行分类了。
(三)Haar特征
Haar特征分为三类:边缘特征、线性特征、中心特征和对角线特征,组合成特征模板。
SIFT ORB
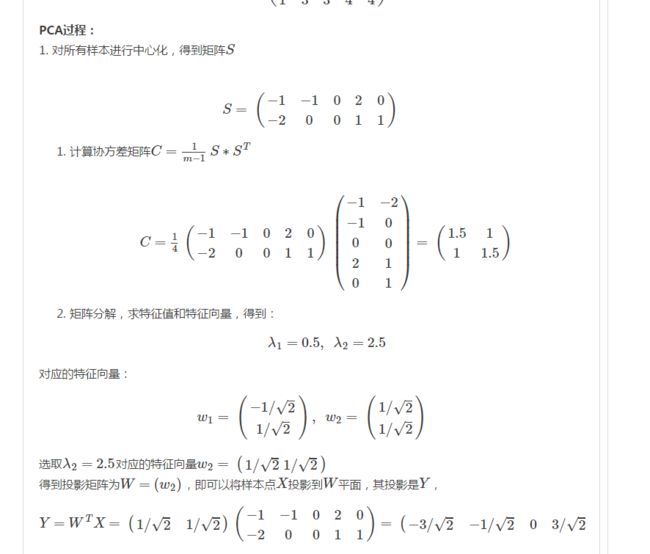
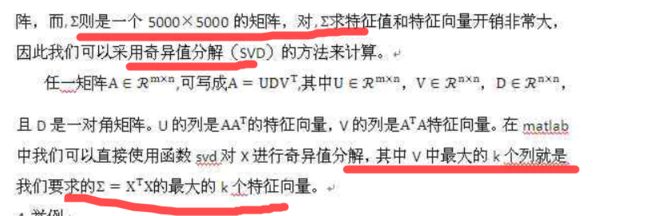
3.PCA
1.PCA过程

4.图像分割
1.基于区域增长的方法:
区域生长实现的步骤如下:
1. 对图像顺序扫描!找到第1个还没有归属的像素, 设该像素为(x0, y0);
2. 以(x0, y0)为中心, 考虑(x0, y0)的4邻域像素(x, y)如果(x0, y0)满足生长准则, 将(x, y)与(x0, y0)合并(在同一区域内), 同时将(x, y)压入堆栈;
3. 从堆栈中取出一个像素, 把它当作(x0, y0)返回到步骤2;
4. 当堆栈为空时!返回到步骤1;
5. 重复步骤1 - 4直到图像中的每个点都有归属时。生长结束。
2. 区域分裂合并
1. 把一幅图像分成4份,计算每一份图像的最大灰度值与最小灰度值的差, 如果差在误差范围值外,则该份图像继续分裂。
2. 对于那些不需要分裂的那些份图像可以对其进行阈值切割了,例如某一块图像的最大灰度大于某个值,则该块图像变成255,否则变为0。