对于HMM的评估问题,利用动态规划可以用前向算法,从前到后算出前向变量;也可以采用后向算法,从后到前算出后向变量。
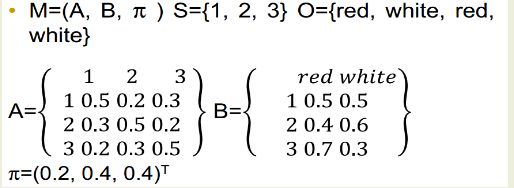
先介绍后向变量βt(i):给定模型μ=(A,B,π),并且在时间 时刻t 状态为si 的前提下,输出序列为Ot+1Ot+2...OT的概率,即
βt(i)=P(Ot+1Ot+2...OT|qt=si,μ)
归纳过程
假设仍然有3个状态
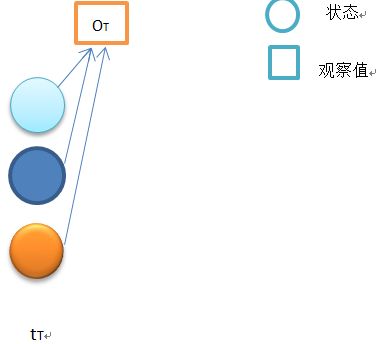
当t=T时,按照定义:时间t 状态qT 输出为OT+1......的概率,从T+1开始的输出是不存在的(因为T时刻是终止终止状态),即T之后是空,是个必然事件,因此βt(i)=1,1≤1≤N
当t=T-1时,
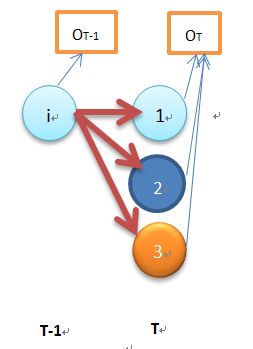
βT-1(i)=P(OT|qT-1=si,μ) = ai1*b1(OT)*βT(1) + ai2*b2(OT)*βT(2) + ai3*b3(OT)*βT(3)
......
当t=1时,
β1(1)=P(O2O3...OT|q2=s1,μ) = a11*b1(O2)*β2(1) + a12*b2(O2)*β2(2) + a13*b3(O2)*β2(3)
β1(2)=P(O2O3...OT|q2=s1,μ) = a21*b1(O2)*β2(1) + a22*b2(O2)*β2(2) + a23*b3(O2)*β2(3)
β1(3)=P(O2O3...OT|q2=s1,μ) = a31*b1(O2)*β2(1) + a32*b2(O2)*β2(2) + a33*b3(O2)*β2(3)
P(O1O2...OT|μ) = 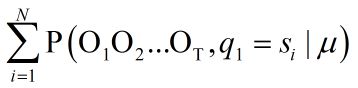
= 
= 
后向算法
step1 初始化:βT(i)=1, 1≤1≤N
step2 归纳计算:
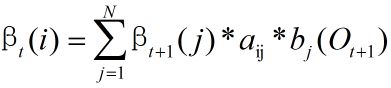 1≤t≤T-1, 1≤i≤N
1≤t≤T-1, 1≤i≤N
step3 求终结和:
P(O|μ)= 
时间复杂度
计算某时刻在某个状态下的后向变量需要看后一时刻的N个状态,此时时间复杂度为O(N),每个时刻有N个状态,此时时间复杂度为N*O(N)=O(N2),又有T个时刻,所以时间复杂度为T*O(N2)=O(N2T)。
程序例证
后向算法
计算P(O|M):
step1:β4(1) = 1 β4(2) = 1 β4(3) = 1
step2:β3(1) = β4(1)*a11*b1(white) + β4(2)*a12*b2(white) + β4(3)*a13*b3(white)
...
step3:P(O|M) = π1*β1(1)*b1(O1) + π2*β1(2)*b2(O1) + π3*β1(3)*b3(O1)
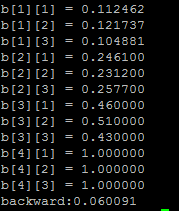
程序代码
#include#include #include <string.h> int main() { float a[3][3] = {{0.5,0.2,0.3},{0.3,0.5,0.2},{0.2,0.3,0.5}}; float b[3][2] = {{0.5,0.5},{0.4,0.6},{0.7,0.3}}; float result[4][3]; int list[4] = {0,1,0,1}; result[3][0] = 1; result[3][1] = 1; result[3][2] = 1; int i,j,k, count = 3; for (i=2; i>=0; i--) { for(j=0; j<=2; j++) { result[i][j] = 0; for(k=0; k<=2; k++) { result[i][j] += result[i+1][k] * a[j][k] * b[k][list[count]]; } } count -= 1; } for (i=0; i<=3; i++) { for(j=0; j<=2; j++) { printf("b[%d][%d] = %f\n",i+1,j+1,result[i][j]); } } printf("backward:%f\n", result[0][0]*0.2*0.5+result[0][1]*0.4*0.4+result[0][2]*0.4*0.7); return 0; }
运行结果