数字图像处理:图像缩放和降低灰度级
打开、显示、存储图片
用Python版OpenCV实现
image = cv2.imread("images/2_20_a.jpg", cv2.IMREAD_UNCHANGED)
cv2.imwrite("images/full.jpg", image, [int(cv2.IMWRITE_JPEG_QUALITY), 100])
cv2.imshow("image", image)
cv2.waitKey(0)
打开图片后,可以看图片由矩阵构成,shape显示了图片的行高和列宽,打开的是一幅灰度图片,因此只有一个通道

显示图片:

保存:

未经压缩,该图片占444 * 338 * 8bit = 444 * 338 B = 146.5KB
原图在磁盘占20.1KB
保存的图片占53.6KB
图像缩放
最近领域插值
h h h, w w w, h 0 h_0 h0, w 0 w_0 w0 分别为原图高、宽,和目标高、宽
g ( x , y ) g(x, y) g(x,y)为新图像x行y列的灰度等级, f ( x , y ) f(x, y) f(x,y)为原图像
g ( x , y ) = f ( x h h 0 , y w w 0 ) ( 1 ) g(x, y) = f(\frac{xh}{h_0}, \frac{yw}{w_0}) (1) g(x,y)=f(h0xh,w0yw)(1)
或从原图像对应目标图像
g ( x h 0 h , y w 0 w ) = f ( x , y ) ( 2 ) g(\frac{xh_0}{h}, \frac{yw_0}{w}) = f(x, y) (2) g(hxh0,wyw0)=f(x,y)(2)
在(1)式中,假如 h h 0 > 1 \frac{h}{h_0} > 1 h0h>1 缩小图像
在(2)式中,若g(x, y)为原图像,f(x, y)为新图像,则 h 0 h < 1 \frac{h_0}{h} < 1 hh0<1 放大图像
出现小数时,取整。
Python关键代码:
def nearest(img, size):
"""
Nearest neighbor interpolation
:param img: source image
:param size: (height, width)
:return: destination image
"""
re = np.zeros([size[0], size[1], 1], np.uint8)
for x in range(size[0]):
for y in range(size[1]):
new_x = int(x * (img.shape[0] / size[0]))
new_y = int(y * (img.shape[1] / size[1]))
re[x, y] = img[new_x, new_y]
return re
双线性插值
对于一个目的像素,设置坐标通过反向变换得到的浮点坐标为 ( i + u , j + v ) (i+u,j+v) (i+u,j+v) (其中i、j均为浮点坐标的整数部分,u、v为浮点坐标的小数部分,是取值[0,1)区间的浮点数),则这个像素得值 f ( i + u , j + v ) f(i+u,j+v) f(i+u,j+v) 可由原图像中坐标为 ( i , j ) , ( i + 1 , j ) , ( i , j + 1 ) , ( i + 1 , j + 1 ) (i,j), (i+1,j), (i,j+1), (i+1,j+1) (i,j),(i+1,j),(i,j+1),(i+1,j+1)所对应的周围四个像素的值决定,即:
g ( x , y ) = f ( x h h 0 , y w w 0 ) = f ( i + u , j + v ) = ( 1 − u ) ( 1 − v ) f ( i , j ) + ( 1 − u ) v f ( i , j + 1 ) + u ( 1 − v ) f ( i + 1 , j ) + u v f ( i + 1 , j + 1 ) g(x, y) = f(\frac{xh}{h_0}, \frac{yw}{w_0}) = f(i+u, j+v) = (1-u)(1-v)f(i,j) + (1-u)vf(i,j+1) + u(1-v)f(i+1,j) + uvf(i+1,j+1) g(x,y)=f(h0xh,w0yw)=f(i+u,j+v)=(1−u)(1−v)f(i,j)+(1−u)vf(i,j+1)+u(1−v)f(i+1,j)+uvf(i+1,j+1)
出现小数时考虑周围情况,离哪个点进,那个点发挥的作用就更大。
Python关键代码:
def bilinear(img, size):
"""
Bilinear interpolation
:param img: source image
:param size: (height, width)
:return: destination image
"""
re = np.zeros([size[0], size[1], 1], np.uint8)
for x in range(size[0]):
for y in range(size[1]):
new_x = x * (img.shape[0] / size[0])
new_y = y * (img.shape[1] / size[1])
i = int(new_x)
j = int(new_y)
u = new_x - i
v = new_y - j
if i + 1 >= img.shape[0]:
i = img.shape[0] - 2
if j + 1 >= img.shape[1]:
j = img.shape[1] - 2
# f(i+u,j+v)=(1−u)(1−v)f(i,j)+(1−u)vf(i,j+1)+u(1−v)f(i+1,j)+uvf(i+1,j+1)
re[x, y] = (1-u)*(1-v)*img[i, j]
+ (1-u)*v*img[i, j+1]
+ u*(1-v)*img[i+1, j]
+ u*v*img[i+1, j+1]
return re
结果:
从左到右
图一:原图
图二:用最近领域插值缩放0.5,再扩大2倍,恢复原图大小
图三:用双线性插值缩放0.5,再扩大2倍,恢复原图大小
图四:OpenCV.resize缩放0.5,再扩大2倍,恢复原图大小

缩放倍数为0.2,再恢复原大小时

OpenCV的效过较好,双线性插值其次,最近领域插值效果非常差。
降低灰度分辨率
下面函数先量化到level+1级,再量化至256级以显示
def reduce_intensity_levels(img, level):
img = cv2.copyTo(img, None)
for x in range(img.shape[0]):
for y in range(img.shape[1]):
si = img[x, y]
ni = int(level * si / 255 + 0.5) * (255 / level)
img[x, y] = ni
return img
8灰度级图像

4灰度级图像
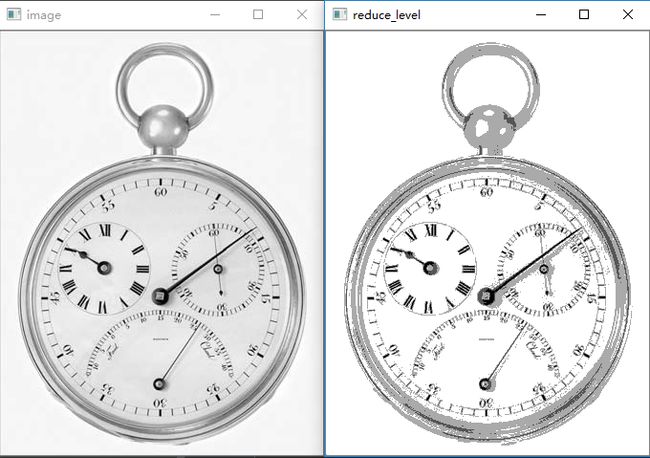
出现假轮廓
2灰度级图像(2值化 0~127置0 128~256置255)
