边缘检测之Robert算子
Robert算子,之前被用到了图像增强中的锐化,原因是作为一阶微分算子,Robert简单,计算量小,对细节反应敏感。
算子对边缘检测的作用是提供边缘候选点,Robert算子相比于其他3x3算子,在不经过后处理时,可以给出相对较细的边缘。
算子介绍
以下坐标新采用的是i,j坐标系,其中i=−y,j=x。
Robert算子的形式是
Gi≅−1001 Gj≅01−10
Gx≅0−110 Gy≅100−1
与标准一阶差分不同,Robert采用对角线差分。之所以采用这个的原因有几种解释。
Gi≅f[i+1,j]−f[i,j]=[−11]
Gj≅f[i,j+1]−f[i,j]=[−1| 1]
而这样进行计算,并不在相同的位置进行计算。
所以要通过使用2×2的标准一阶差来解决这个问题
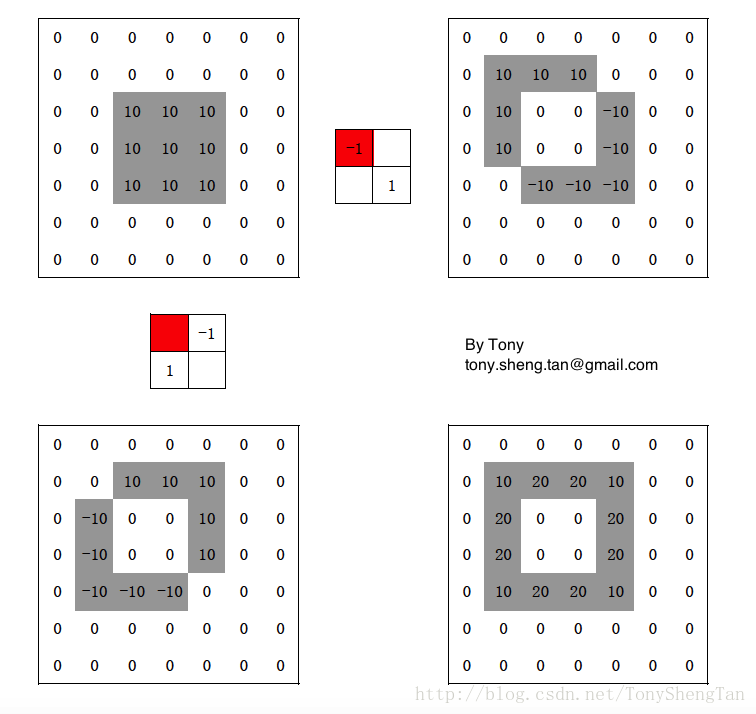
Gi≅−11−11 Gj≅−1−111
在实际问题中,如果我们采用标准的一阶微分算子,对下面一个数字化的矩形进行横向和纵向的差分,并得出结果,红色表示算子模板中心:
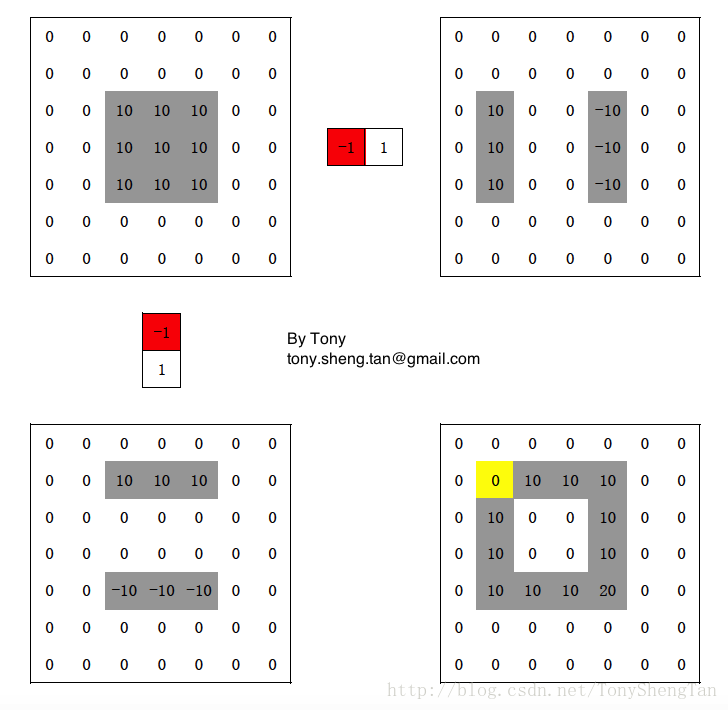
可以看出,得到的边缘一部分是在内边界,一部分是外边界,并且,黄色像素点并未有计算结果,也就是,边缘候选点丢失了一个。
检验完候选点后,接下来的任务是筛选,筛选算法有很多,但最简单的是阈值处理,即超过阈值的为边缘,否则为噪声,或非边缘,这样做的缺点是不准确,有点是速度极快。计算量相当小,在速度要求较高的但准确度要求不高的地方,可以使用Robert加阈值的简单处理。得到边缘。
参考文献
Roberts cross
灰度图像–图像分割 Robert算子