Qt Modbus库使用,并作为ROS节点发布话题及程序CMakelist编写
在QT框架下,使用QModbus库实现了客户端程序对埃夫特机器人ER50C10A实时读取当前关节角度、笛卡尔坐标值等参数。
同时作为ROS节点发布到话题/joint_states中。
程序逻辑:
启动Modbus -- 连接--发送读取请求 --等待qt返回读取完毕信号触发槽函数读取 --读取并显示
其中,连接与发送请求等各部分需要写到不同的槽函数中,否则会报错modbus未连接。
程序代码:(截取部分)
主程序:初始化ROS节点、TOPIC、qt对象
int main(int argc, char *argv[])
{
ros::init ( argc, argv, "test_modbus" );
ros::NodeHandle n;
ros::Publisher Cmd = n.advertise ("/joint_states", 1024 );
QApplication a(argc, argv);
ModbusTcpClient w;
w.publisher = &Cmd;
w.show();
return a.exec();
} QModbus相关程序:
ModbusTcpClient::ModbusTcpClient(QWidget *parent) :
QMainWindow(parent),
ui(new Ui::ModbusTcpClient), m_holdingRegisters(20)
{
ui->setupUi(this);
modbusDevice = new QModbusTcpClient(this);
ui->lineEdit->setText(QLatin1Literal("192.168.0.103:502"));
connect(modbusDevice, &QModbusClient::errorOccurred, [this](QModbusDevice::Error) {statusBar()->showMessage(modbusDevice->errorString(), 5000);});
connect(modbusDevice, &QModbusClient::stateChanged,this, &ModbusTcpClient::onStateChanged);
connect(this, SIGNAL(readonce()),this,SLOT(on_readButton_clicked()));
}
ModbusTcpClient::~ModbusTcpClient()
{
if (modbusDevice)
modbusDevice->disconnectDevice();
delete modbusDevice;
delete ui;
}
void ModbusTcpClient::on_connectButton_clicked()
{
emit Scan();
if (!modbusDevice)
return;
statusBar()->clearMessage();
if (modbusDevice->state() != QModbusDevice::ConnectedState) {
const QUrl url = QUrl::fromUserInput(ui->lineEdit->text());
modbusDevice->setConnectionParameter(QModbusDevice::NetworkPortParameter, url.port());
modbusDevice->setConnectionParameter(QModbusDevice::NetworkAddressParameter, url.host());
modbusDevice->setTimeout(1000);
modbusDevice->setNumberOfRetries(3);
if (!modbusDevice->connectDevice()) {
statusBar()->showMessage(tr("Connect failed: ") + modbusDevice->errorString(), 5000);
}
}
else {
modbusDevice->disconnectDevice();
}
}
void ModbusTcpClient::onStateChanged(int state)
{
if (state == QModbusDevice::UnconnectedState)
ui->connectButton->setText(tr("Connect"));
else if (state == QModbusDevice::ConnectedState)
ui->connectButton->setText(tr("Disconnect"));
}
void ModbusTcpClient::on_readButton_clicked()
{
if (!modbusDevice)
return;
statusBar()->clearMessage();
QModbusDataUnit readUnit(QModbusDataUnit::HoldingRegisters, 12, 12);
if (auto *reply = modbusDevice->sendReadRequest(readUnit, 1)) {
if (!reply->isFinished())
connect(reply, &QModbusReply::finished, this, &ModbusTcpClient::readReady);
else
delete reply; // broadcast replies return immediately
}
else {
statusBar()->showMessage(tr("Read error: ") + modbusDevice->errorString(), 5000);
}
}
void ModbusTcpClient::readReady()
{
std::vector jointPos;
jointPos.clear();
auto reply = qobject_cast(sender());
if (!reply)
return;
if (reply->error() == QModbusDevice::NoError) {
const QModbusDataUnit unit = reply->result();
for (uint i = 0; i < unit.valueCount(); i++) {
const QString entry = tr("Address: %1, Value: %2").arg(unit.startAddress())
.arg(QString::number(unit.value(i),
unit.registerType() <= QModbusDataUnit::Coils ? 10 : 16));
);
}
ui->textBrowser->insertPlainText("机器人当前位姿:");
for (int q = 0; q < 6; q++)
{
poses.clear();
QString number1 = QString::number(unit.value(2 * q + 1), unit.registerType() <= QModbusDataUnit::Coils ? 10 : 16);
if (number1.length() < 4)
{
poses.append(QString::number(0));
}
poses.append(QString::number(unit.value(2 * q + 1), unit.registerType() <= QModbusDataUnit::Coils ? 10 : 16));
QString number2 = QString::number(unit.value(2 * q), unit.registerType() <= QModbusDataUnit::Coils ? 10 : 16);
if (number2.length() < 4)
{
poses.append(QString::number(0));
}
poses.append(QString::number(unit.value(2 * q), unit.registerType() <= QModbusDataUnit::Coils ? 10 : 16));
pose[q] = BytesToFloat(poses);
qDebug() << poses;
jointPos.push_back(pose[q]/180*3.1415926);
ui->textBrowser->insertPlainText(QString::number(pose[q]));
ui->textBrowser->insertPlainText(" ");
}
ui->textBrowser->insertPlainText("\n");
ui->textBrowser->moveCursor(QTextCursor::End);
jointState.header.stamp = ros::Time::now();
jointState.name = j_names;
jointState.position = jointPos;
publisher->publish(jointState);
}
else if (reply->error() == QModbusDevice::ProtocolError) {
statusBar()->showMessage(tr("Read response error: %1 (Mobus exception: 0x%2)").
arg(reply->errorString()).
arg(reply->rawResult().exceptionCode(), -1, 16), 5000);
}
else {
statusBar()->showMessage(tr("Read response error: %1 (code: 0x%2)").
arg(reply->errorString()).
arg(reply->error(), -1, 16), 5000);
}
reply->deleteLater();
emit readonce();
}
void ModbusTcpClient::Display()
{
ui->textBrowser->insertPlainText(QDateTime::currentDateTime().toString("yyyy-MM-dd hh:mm:ss "));
ui->textBrowser->insertPlainText("机器人当前位姿:");
ui->textBrowser->moveCursor(QTextCursor::End);
} CMakeList编写:
cmake_minimum_required(VERSION 2.8.3)
project(test_modbus)
add_compile_options(-std=c++11)
set(CMAKE_INCLUDE_CURRENT_DIR ON)
set(CMAKE_AUTOMOC ON)
set(CMAKE_AUTOUIC ON)
set(CMAKE_AUTORCC ON)
set(Qt5SerialBus_DIR "/home/xxx/Qt5.8.0/5.8/gcc_64/lib/cmake/Qt5SerialBus")
find_package(catkin REQUIRED roscpp std_msgs sensor_msgs)
find_package(Qt5Widgets REQUIRED)
find_package(Qt5SerialBus REQUIRED)
catkin_package()
include_directories(${catkin_INCLUDE_DIRS})
include_directories(${Qt5SerialBus_INCLUDE_DIRS})
add_definitions(${Qt5SerialBus_DEFINITIONS})
qt5_wrap_ui( UIC src/test_modbus.ui)
add_executable(testmodbus src/main.cpp src/test_modbus.cpp src/test_modbus.h src/test_modbus.ui)
target_link_libraries(testmodbus ${catkin_LIBRARIES} Qt5::Widgets Qt5::SerialBus)
结果
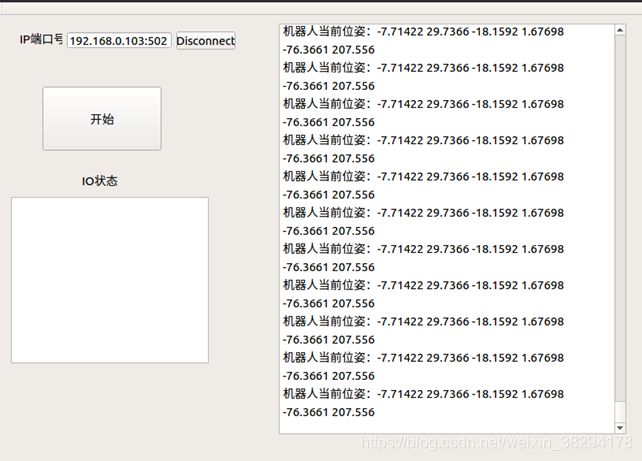
QT界面
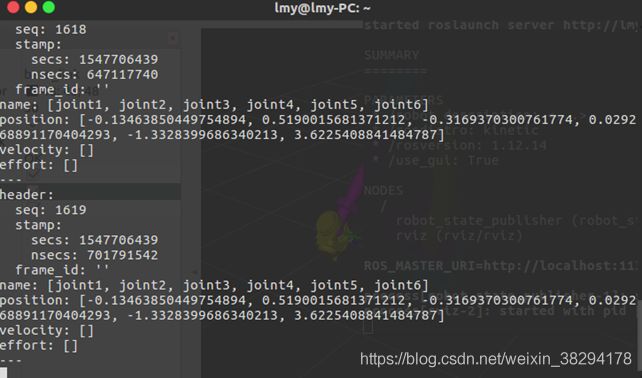
ROS-joint_states话题
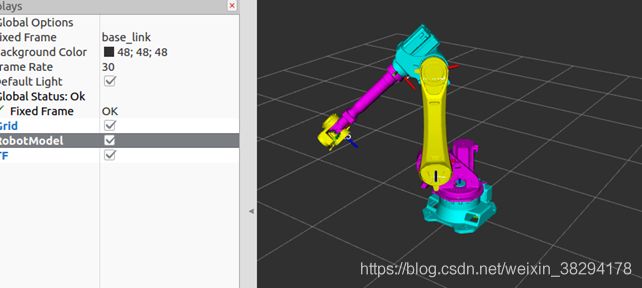
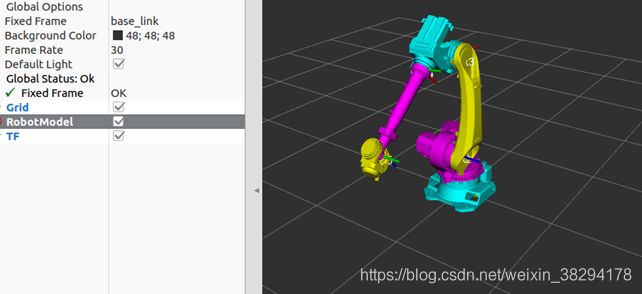
ROS-机器人仿真界面