用MATLAB三步完成机器人搭建
全世界只有3.14 % 的人关注了
爆炸吧知识
如果说机器人是一粒种子,那么《机器人大擂台》这档节目就是那个播种人。节目中,不同选手操纵着机器人,在擂台上各显神威 —— 冲撞、翻滚、撬杠、喷火等各种技能,总能令人眼花缭乱,同时点燃心中关于机器人的各种幻想。
图片来自 https://giphy.com/gifs/
如今的机器人应用广泛,机器人技术也开始源源不断地向人类活动的各个领域渗透,机器人分拣系统和随处可见的无人机。
例如机器人分拣系统,显著地提升了物流公司货物配送的效率:
另一个例子是无人机。如果说分拣机器人还属于各大物流公司的核心机密,如下凡天仙一般平日里难得一睹芳容,那无人机早已化身邻家女孩,平易近人地装点着我们的生活:

机器人的发展不会止步于此。2020年以来,新基建概念大热,其三大方向更是与机器人产业密切相关。教育机器人、送餐机器人、情感机器人及自动驾驶技术,都是机器人及自动化技术的下一个重要落地目标:
动图来自《美国国家地理》
银河补习班里有句经典台词:“我的孩子,上的是全世界最好的补习班,银河补习班。”今天,MATLAB就为你带来宇宙最强机器人补习班,手把手教你如何建造属于自己的机器人!
许多人认为 MATLAB 是数学或教育软件。事实上,MATLAB 最初被广泛采用是在控制工程领域,随后开发了多种技术领先的算法包和工具箱,并被全球各大高校广泛采纳为数学教育软件 [1]。即将进入机器人补习班的你,准备好了吗?
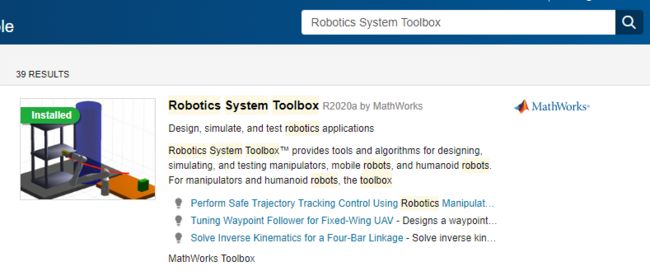
第一步:安装机器人工具箱
工欲善其事,必先利其器,我们首先需要安装 MATLAB 的机器人工具箱(Robotics System Toolbox)。我们既可以上MathWorks 官网 [2] 下载,又可以通过打开 MATLAB 主界面,单击“添加项”(Add-Ons) 选项进行操作。

然后在搜索栏中输入 “Robotics System Toolbox”,进入第一个搜索结果即可安装:
目前软件已更新至最新版本R2020a,增加更多功能,小伙伴可以尝试康康
操作完成后,打开 MATLAB 并输入
>> ver
如果能找到如下信息
Robotics System Toolbox Version 2.x (Rxxxxx)
那么恭喜,机器人工具箱已安装成功!
第二步:你想要什么样的机器人?建模是关键
我们要设计的第一个机器人,是一条可以自由转动的机械手臂。在 MATLAB 中,机械手臂由不同的连杆(Link)通过关节(Joint)拼接而成。依活动状态分,关节又可分为旋转型和平移型,其意义顾名思义 [2]:
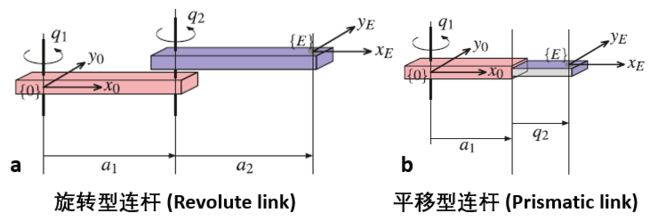
旋转型与平移型连杆
为简单起见,我们先创建一个三连杆的机械臂:
%设置 DH 参数dhparams = [0 pi/2 0 0; 0.4318 0 0 0; ];
robot = rigidBodyTree; % 初始化机械臂body1 = rigidBody( body1 ); % 定义第一个连杆jnt1 = rigidBodyJoint( jnt1 , revolute ); % 定义第一个关节setFixedTransform(jnt1,dhparams(1,:), dh ); body1.Joint = jnt1; % 给底座加上关节addBody(robot,body1, base ) % 定义机械臂为机器人的底座
% 添加第二、三只连杆body2 = rigidBody( body2 ); jnt2 = rigidBodyJoint( jnt2 , revolute );body3 = rigidBody( body3 );jnt3 = rigidBodyJoint( jnt3 , revolute );setFixedTransform(jnt2,dhparams(2,:), dh );setFixedTransform(jnt3,dhparams(3,:), dh );body2.Joint = jnt2;body3.Joint = jnt3;
上面的 dhparams 是一个 n*4 矩阵(n 是机械臂的个数),被称为 DH 参数(Denavit–Hartenberg parameters)。dhparams 的每一行由 [a alpha d theta] 四个变量组成,它们分别表示:
a: 关节(垂直连杆方向的)偏移量
alpha: 关节扭曲角度(垂直于两个连杆构成的平面的角度)
d: 关节(朝着连杆方向的)伸长量
theta: 关节起始旋转角度(平行于两个连杆构成的平面的角度)
如果不小心忘了我们搭建的机器人长啥样,那么下面的命令
showdetails(robot)
可以帮助我们回忆起它的基本特征:

而输入下面的命令,我们即可一睹该机械手臂的庐山真面目:
addBody(robot,body2, body1 )addBody(robot,body3, body2 )show(robot); % 画图
因为我们只搭建了最基本的连杆和关节,所以这个机械手臂难免有些瘦骨嶙峋。不过如果我们把上面的图片放大,就可以看到每个连杆、关节的名字、序号和类型具体信息:
此外,我们还可以给连杆和关节赋予诸如质量、转动惯量、惯性矩阵之类的参数,此处限于篇幅故略去之,有兴趣的小伙伴可以参考链接 [1] 或 [2]。实践出真知,理解以上概念最好的方式,就是逐个调整代码中的参数,观测结果变化。
第三步:看!它左手右手一个慢动作!
我们已经知道如何用 MATLAB 搭建一个简单的机器人了。然而这样搭建的机器人,和小朋友用积木搭建的玩具并无二致 —— 既然是用软件做成的机器人,我们自然希望它能动起来。我们以加拿大机器人公司 Kinova 的第三代机械臂为例,来看看 MATLAB 如何让这支麒麟臂动起来。

图片来自 https://www.kinovarobotics.com/en/products/gen3-robot
在 MATLAB 界面中输入
>> robot = loadrobot("kinovaGen3");>> showdetails(robot)
我们可以看到输出如下
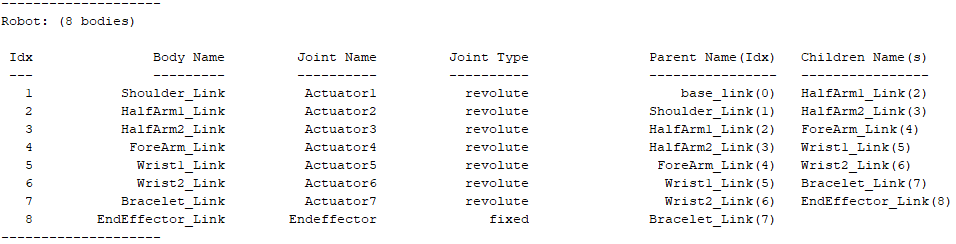
不难看出,第三代 Kinova 是由 8 根连杆和 8 个关节拼接而成。如果我们要想知道某个具体连杆的信息,例如名叫 “Shoulder_Link” 的连杆, 依次输入
>> robot.getBody( Shoulder_Link ).Joint>> robot.getBody( Shoulder_Link ).Joint.JointToParentTransform>> robot.getBody( Shoulder_Link ).Joint.ChildToJointTransform
即可分别查询属于该连杆的关节,以及关节到母连杆和子连杆的转移矩阵。如此一来,我们就可以从这种方法重建出第三代 Kinova 机械臂了!
现在我们有两种方法可以让让机械臂动起来。第一种方法是通过变换关节旋转角度的方式,这种方法叫正运动学(Forward kinematics);第二种方法是通过给定每个连杆末端位置,这种方法叫逆运动学(Inverse kinematics)。正运动学可以很方便地对机械臂进行直接操控,而逆运动学则更有利于直接指定机械臂完成任务,例如抓取处于某位置的快递等等。这两种方法各有千秋。
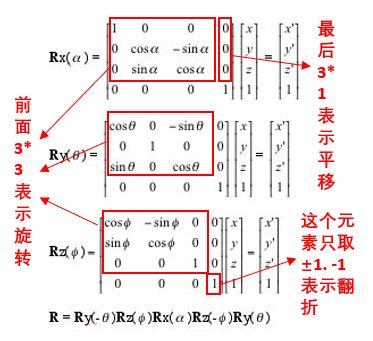
有几何背景的读者知道,n 维欧式空间中的刚体形变可分为平移(Translation)、旋转(Rotation)和镜像(Reflection)三种,这三种变化可以用群作用,或者矩阵来表示。由这三种作用组成的群叫做欧几里得群(Euclidean Group)记作 E(n),因为 E(n) 中的元素都可以用矩阵表示,所以 E(n) n+1 阶矩阵群的子群(具体解释见下图)。群 E(n) 中只由平移和旋转(不含镜像)构成的子群叫做特殊欧几里得群,记作 SE(n)。
下面我们 MATLAB 中的逆运动学函数 inverseKinematics 来让机械臂动起来。我们只需要定义出机械臂所要经过的几个路径点的位置、速度以及加速度,MATLAB 即可通过对特殊欧几里得群求逆来计算出整个机械臂所经过的路径,以及每个时刻的速度以及加速度等信息。
% 关节起始旋转角及初始位置positions = [2*pi, 0.2619, pi, 4.0142, 2*pi, 0.9598, pi/2];config = homeConfiguration(robot);for k = 1:length(positions) config(k).JointPosition = positions(k);end
% 定义机械臂需要通过的路径点以及对应速度、加速度信息waypoints = [0.5639 0.0013 0.4336] + [-0.1 0.2 0.4 ; -0.2 0 0.1 ; -0.1 -0.2 0.4 ;] ;waypointTimes = 0:4:8;ts = 0.2;trajTimes = 0:ts:waypointTimes(end);waypointVels = 0.1 *[ 0 1 0; -1 0 0; 0 -1 0;] ;waypointAccels = zeros(size(waypointVels));waypointAccelTimes = diff(waypointTimes)/4;[q,qd,qdd] = trapveltraj(waypoints,numel(trajTimes), ... AccelTime ,repmat(waypointAccelTimes,[3 1]), ... EndTime ,repmat(diff(waypointTimes),[3 1]));
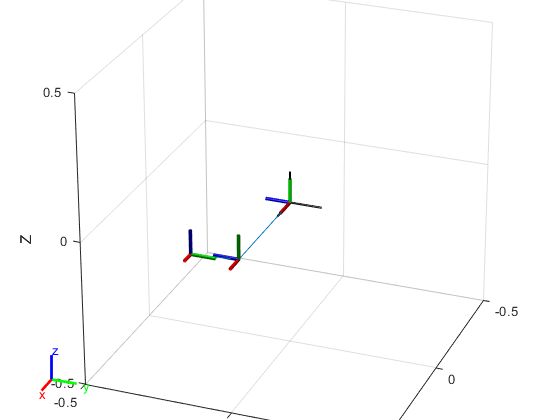
% 画出初始状态%% 画图--机械臂show(gen3,config, Frames , off , PreservePlot ,false);hold on%% 画图--路径初始化hTraj = plot3(waypoints(1,1),waypoints(2,1),waypoints(3,1), b.- );set(hTraj, xdata , q(1,:), ydata , q(2,:), zdata , q(3,:));%% 画图--路径点plot3(waypoints(1,:),waypoints(2,:),waypoints(3,:), ro , LineWidth ,2);set(gca, Position , [-.2, -.2, 1.5, 1.5]);xlim([-1 1]), ylim([-1 1]), zlim([0 1.2]);
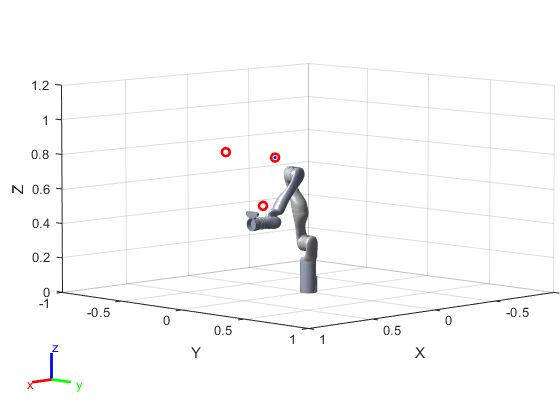
机械臂的初始位置。红色点表示机械臂所要经过的路径点
% 初始化机械臂的逆运动学方程ik = inverseKinematics( RigidBodyTree ,robot);ikWeights = [1 1 1 1 1 1];ikInitGuess = robot.homeConfiguration; % 随机设置一个初始状态
% 让机器人动起来!for idx = 1:numel(trajTimes) % 解逆运动学方程 tgtPose = trvec2tform(q(:,idx) ); [config,info] = ik( EndEffector_Link , tgtPose,ikWeights,ikInitGuess); ikInitGuess = config; % 以上一时刻的状态作为下一时刻的初始值
% 画出机器人的动态 show(robot,config, Frames , off , PreservePlot ,false); title([ Trajectory at t = num2str(trajTimes(idx))]) drawnow end
最后得到的轨迹图如下:
有兴趣的读者可以修改上面代码中的参数(例如路径点的位置、机械臂的速度加速度等),来看看结果会出现怎样的变化。
更高级的智能
在实际使用中,除了要让机器人会动外,还需要赋予它们自主性。在本节中,我们希望机器人拥有路径规划以及障碍躲避的能力,让我们来一起见证什么是更高级的智能。
我们以即时定位与地图构建算法(Simultaneous localization and mapping,SLAM)作为例子。该算法可以通过著名的卡曼滤波(Kalman Filter)来得以实现。在如雷达、声呐、天气预报、火箭发射、计算机视觉、控制理论等诸多工程应用中,都离不开卡曼滤波的身影。
从抽象角度看来,卡曼滤波无非就是传感器不断根据外部环境,调控机器状态的一种装置。记机器状态 x (位置、速度等),传感器测量的外部环境变量为 z(温度、气压等),可调控的变量为 u (电磁波发射频率、前进方向等),v 和 w 分别表示机器和传感器误差,那么卡曼滤波可以表达为一个数学模型:

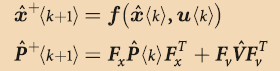
k 表示离散的时刻。如果 f 和 h 都是线性矩阵,那直接让上面两式对 x, z 分别求偏导数,然后再更新 x 和 z 的值即可(F_a, H_a 分别表示 f 和 h 对变量 a 的偏导数向量):

如果 f 和 h 并非线性,由于误差项的累计,直接简单粗暴地线性化势必会带来更大的误差。为此,人们采用预测-更新(Predict-Update)两阶段算法来解决非线性的卡曼滤波问题 —— 在预测阶段,我们不仅要预测机器的状态 x,还要预测卡曼滤波的矩阵 P。这种算法叫扩展卡曼滤波(Extended Kalman Filter,EKF),是 SLAM 的灵魂所在,有兴趣的读者可参考文献 [2]。
P
推导过程令人头秃?那我们来看一看代码及实现过程吧!
% 初始化机器人及起始点、终点% 我们的目的是希望机器人能顺利躲过障碍物并到达终点map = LandmarkMap(20, 10); % 10*10 地图,20 个障碍物V = diag([0.005, 0.5*pi/180].^2); % 机器(每个步长)的误差矩阵robot = Bicycle( covar , V); % 初始化机器人robot.add_driver( RandomPath(10)); % 定义终点% 定义传感器% angle:传感器扫射角度范围% range:传感器扫射距离W = diag([0.1, 1*pi/180].^2); % 传感器(每个步长)的误差矩阵sensor = RangeBearingSensor(robot, map, covar , W, ... animate , angle , [-pi/2 pi/2], range , 5);
% 初始化 EKF, 并运行 150 个步长P0 = diag([0.005, 0.005, 0.001].^2); % 卡曼滤波初始时刻的协方差矩阵ekf = EKF(robot, V, P0, sensor, W, []);ekf.run(150);
上图中蓝色三角形表示机器人,红色菱形表示目标,粉红色扇形表示传感器扫查范围
造机器人?就是如此简单!
读到这里,相信大家对 MATLAB 的机器人工具包已经有了充足的认识。身边无人陪伴倍感孤独?—— MATLAB 帮你打造属于你自己的机器人!
机器人行业快速发展的同时,要面临各种各样的机遇和挑战。MATLAB 的机器人工具包也一样,仍需不断的革新和研发,在以下方面得以改善:
工具包没有覆盖机器视觉方面的内容,因此机器人的传感器只能处理非图像环境信息。要想给机器人加一双眼睛,需要下载计算机视觉工具箱(Computer Vision Toolbox)或图像处理工具箱(Image Processing Toolbox);
工具包无法利用大数据,这在高度信息化的今天,对机器人的成长是不利的。要想让机器人拥有大数据处理技能,需要统计及机器学习工具箱(Statistics and Machine Learning Toolbox)或深度学习工具箱(Deep Learning Toolbox)。
小时候在看《终结者》、《黑客帝国》等科幻电影时,总认为像“机器人三定律”这样的元素离真实世界还很遥远。然而随着计算机视觉、机器学习、深度学习等人工智能相关领域的迅速发展,这些科幻电影里的元素会离现实越来越近。小编希望这篇文章能对大家有所启发,真正的学习要从兴趣开始,而总有一天,你我会圆梦在今朝!
号外:5月28日北京时间13:30,线上技术研讨会(机器人与人工智能专题):加速智能化融合,提高产品开发效率开播,感兴趣的小伙伴可以扫描二维码或点击阅读原文报名参与哟!

参考文献
[1]https://ww2.mathworks.cn/campaigns/products/trials.html?prodcode=RO&s_eid=PEP_23398
[2] https://ww2.mathworks.cn/products/robotics.html?s_eid=PEP_23398
[3] 蔡自兴, 谢斌. 《机器人学》. 清华大学出版社; 2000.
[4]https://www.mathworks.com/matlabcentral/fileexchange/71130-trajectory-planning-for-robot-manipulators