一致性及解决一致性的两种方式:2PC和3PC
1 一致性
1.1 简述
一致性,是指对每个节点一个数据的更新,整个集群都知道更新,并且是一致的
假设一个具有N个节点的分布式系统,当其满足以下条件时,我们说这个系统满足一致性:
- 全认同: 所有N个节点都认同一个结果
- 值合法: 该结果必须由N个节点中的过半节点提出
- 可结束: 决议过程在一定时间内结束,不会无休止地进行下去
1.2 面临着的问题
- 消息传递异步无序: 现实网络不是一个可靠的信道,存在消息延时、丢失,节点间消息传递做不到同步有序
- 节点宕机: 节点持续宕机,不会恢复
- 节点宕机恢复: 节点宕机一段时间后恢复,在分布式系统中最常见
- 网络分化: 网络链路出现问题,将N个节点隔离成多个部分
- 拜占庭将军问题: 节点或宕机或逻辑失败,甚至不按套路出牌抛出干扰决议的信息
假设现实场景中也存在这样的问题:

周五 我:晚上下班吃鸡 周六凌晨 xc:好的 // 消息延迟 我:... --------------------------------- 我:晚上下班吃鸡 xc:No (两小时后) xc:No problem! // 宕机节点恢复 我:... --------------------------------- 我:晚上下班吃鸡 ... // 节点宕机 --------------------------------- 我:晚上下班吃鸡 cx:好,我们去大保健! // 拜占庭将军 我:...
2 2PC
2.1 简述
2PC(tow phase commit)两阶段提交。
所谓的两个阶段是指:第一阶段:准备阶段(投票阶段)和第二阶段:提交阶段(执行阶段)。
我们将提议的节点称为协调者(coordinator),其他参与决议节点称为参与者(participants, 或cohorts)。
2.2 阶段1
在阶段1中,协调者发起一个提议,分别问询各参与者是否接受,如下图:
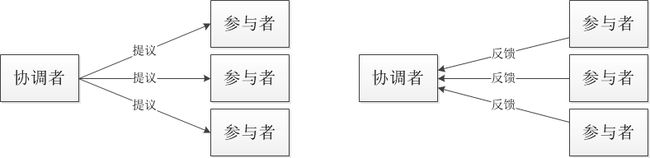
2.3 阶段2
在阶段2中,协调者根据参与者的反馈,提交或中止事务,如果参与者全部同意则提交,只要有一个参与者不同意就中止。
如下图:

2.4 实例
下面我们通过一个例子来说明两阶段提交协议的工作过程:
A组织B、C和D三个人去爬山:如果所有人都同意去爬山,那么活动将举行;如果有一人不同意去爬山,那么活动将取消。用2PC算法解决该问题的过程如下:
首先A将成为该活动的协调者,B、C和D将成为该活动的参与者。
阶段1:
①A发邮件给B、C和D,提出下周三去爬山,问是否同意。那么此时A需要等待B、C和D的邮件。
②B、C和D分别查看自己的日程安排表。B、C发现自己在当日没有活动安排,则发邮件告诉A它们同意下周三去爬山。由于某种原因, D白天没有查看邮 件。那么此时A、B和C均需要等待。到晚上的时候,D发现了A的邮件,然后查看日程安排,发现周三当天已经有别的安排,那么D回复A说活动取消吧。
阶段2:
①此时A收到了所有活动参与者的邮件,并且A发现D下周三不能去爬山。那么A将发邮件通知B、C和D,下周三爬山活动取消。
②此时B、C回复A“太可惜了”,D回复A“不好意思”。至此该事务终止。
2.5 优缺点
在异步环境并且没有节点宕机的模型下,2PC可以满足全认同、值合法、可结束,是解决一致性问题的一种协议。从协调者接收到一次事务请求、发起提议到事务完成,经过2PC协议后增加了2次RTT(propose+commit),带来的时延增加相对较少。
二阶段提交有几个缺点:
- 同步阻塞问题。执行过程中,所有参与节点都是事务阻塞型的。当参与者占有公共资源时,其他第三方节点访问公共资源不得不处于阻塞状态。
- 单点故障。由于协调者的重要性,一旦协调者发生故障。参与者会一直阻塞下去。尤其在第二阶段,协调者发生故障,那么所有的参与者还都处于锁定事务资源的状态中,而无法继续完成事务操作。(如果是协调者挂掉,可以重新选举一个协调者,但是无法解决因为协调者宕机导致的参与者处于阻塞状态的问题)
- 数据不一致。在二阶段提交的阶段二中,当协调者向参与者发送commit请求之后,发生了局部网络异常或者在发送commit请求过程中协调者发生了故障,这回导致只有一部分参与者接受到了commit请求。而在这部分参与者接到commit请求之后就会执行commit操作。但是其他部分未接到commit请求的机器则无法执行事务提交。于是整个分布式系统便出现了数据部一致性的现象。
- 二阶段无法解决的问题:协调者再发出commit消息之后宕机,而唯一接收到这条消息的参与者同时也宕机了。那么即使协调者通过选举协议产生了新的协调者,这条事务的状态也是不确定的,没人知道事务是否被已经提交。
2.6 2pc的衍生
2PC协议包含协调者和参与者,并且二者都有发生问题的可能性。假如协调者发生问题,我们可以选出另一个协调者来提交事务。例如,班长组织活动,如果班长生病了,我们可以请副班长来组织。如果协调者出问题,那么事务将不会取消。例如,班级活动希望每个人都能去,假如有一位同学不能去了,那么直接取消活动即可。或者,如果大多数人去的话那么活动如期举行(2PC变种)。
3 3pc
3.1 简述
三阶段提交(Three-phase commit),是二阶段提交(2PC)的改进版本。
与两阶段提交不同的是,三阶段提交有两个改动点。
- 引入超时机制。同时在协调者和参与者中都引入超时机制。
- 在第一阶段和第二阶段中插入一个准备阶段。保证了在最后提交阶段之前各参与节点的状态是一致的。
也就是说,除了引入超时机制之外,3PC把2PC的准备阶段再次一分为二,这样三阶段提交就有CanCommit、PreCommit、DoCommit三个阶段。
3.2 CanCommit阶段
3PC的CanCommit阶段其实和2PC的准备阶段很像。协调者向参与者发送commit请求,参与者如果可以提交就返回Yes响应,否则返回No响应。
- 事务询问 协调者向参与者发送CanCommit请求。询问是否可以执行事务提交操作。然后开始等待参与者的响应。
- 响应反馈 参与者接到CanCommit请求之后,正常情况下,如果其自身认为可以顺利执行事务,则返回Yes响应,并进入预备状态。否则反馈No
3.3 PreCommit阶段
协调者根据参与者的反应情况来决定是否可以记性事务的PreCommit操作。根据响应情况,有以下两种可能。
假如协调者从所有的参与者获得的反馈都是Yes响应,那么就会执行事务的预执行。
- 发送预提交请求 协调者向参与者发送PreCommit请求,并进入Prepared阶段。
- 事务预提交 参与者接收到PreCommit请求后,会执行事务操作,并将undo和redo信息记录到事务日志中。
- 响应反馈 如果参与者成功的执行了事务操作,则返回ACK响应,同时开始等待最终指令。
假如有任何一个参与者向协调者发送了No响应,或者等待超时之后,协调者都没有接到参与者的响应,那么就执行事务的中断。
- 发送中断请求 协调者向所有参与者发送abort请求。
- 中断事务 参与者收到来自协调者的abort请求之后(或超时之后,仍未收到协调者的请求),执行事务的中断。
3.4 doCommit阶段
该阶段进行真正的事务提交,也可以分为以下两种情况。
执行提交
- 发送提交请求 协调接收到参与者发送的ACK响应,那么他将从预提交状态进入到提交状态。并向所有参与者发送doCommit请求。
- 事务提交 参与者接收到doCommit请求之后,执行正式的事务提交。并在完成事务提交之后释放所有事务资源。
- 响应反馈 事务提交完之后,向协调者发送Ack响应。
- 完成事务 协调者接收到所有参与者的ack响应之后,完成事务。
中断事务
协调者没有接收到参与者发送的ACK响应(可能是接受者发送的不是ACK响应,也可能响应超时),那么就会执行中断事务。
- 发送中断请求 协调者向所有参与者发送abort请求
- 事务回滚 参与者接收到abort请求之后,利用其在阶段二记录的undo信息来执行事务的回滚操作,并在完成回滚之后释放所有的事务资源。
- 反馈结果 参与者完成事务回滚之后,向协调者发送ACK消息
- 中断事务 协调者接收到参与者反馈的ACK消息之后,执行事务的中断。

3PC的优点和缺陷
优点:降低了阻塞范围,在等待超时后协调者或参与者会中断事务。避免了协调者单点问题,阶段3中协调者出现问题时,参与者会继续提交事务。
缺陷:脑裂问题依然存在,即在参与者收到PreCommit请求后等待最终指令,如果此时协调者无法与参与者正常通信,会导致参与者继续提交事务,造成数据不一致。
3.5 2pc和3pc的区别
相对于2PC,3PC主要解决的单点故障问题,并减少阻塞,因为一旦参与者无法及时收到来自协调者的信息之后,他会默认执行commit。而不会一直持有事务资源并处于阻塞状态。但是这种机制也会导致数据一致性问题,因为,由于网络原因,协调者发送的abort响应没有及时被参与者接收到,那么参与者在等待超时之后执行了commit操作。这样就和其他接到abort命令并执行回滚的参与者之间存在数据不一致的情况。
在2PC中一个参与者的状态只有它自己和协调者知晓,假如协调者提议后自身宕机,在协调者备份启用前一个参与者又宕机,其他参与者就会进入既不能回滚、又不能强制commit的阻塞状态,直到参与者宕机恢复。
参与者如果在不同阶段宕机,我们来看看3PC如何应对:
- 阶段1: 协调者或协调者备份未收到宕机参与者的vote,直接中止事务;宕机的参与者恢复后,读取logging发现未发出赞成vote,自行中止该次事务
- 阶段2: 协调者未收到宕机参与者的precommit ACK,但因为之前已经收到了宕机参与者的赞成反馈(不然也不会进入到阶段2),协调者进行commit;协调者备份可以通过问询其他参与者获得这些信息,过程同理;宕机的参与者恢复后发现收到precommit或已经发出赞成vote,则自行commit该次事务
- 阶段3: 即便协调者或协调者备份未收到宕机参与者t的commit ACK,也结束该次事务;宕机的参与者恢复后发现收到commit或者precommit,也将自行commit该次事务
3PC为什么比2PC好?
直接分析协调者和参与者都挂的情况。
第二阶段协调者和参与者挂了,挂了的这个参与者在挂之前已经执行了操作。但是由于他挂了,没有人知道他执行了什么操作。
这种情况下,当新的协调者被选出来之后,他同样是询问所有的参与者的情况来觉得是commit还是roolback。这看上去和二阶段提交一样啊?他是怎么解决一致性问题的呢?
看上去和二阶段提交的那种数据不一致的情况的现象是一样的,但仔细分析所有参与者的状态的话就会发现其实并不一样。我们假设挂掉的那台参与者执行的操作是commit。那么其他没挂的操作者的状态应该是什么?他们的状态要么是prepare-commit要么是commit。因为3PC的第三阶段一旦有机器执行了commit,那必然第一阶段大家都是同意commit。所以,这时,新选举出来的协调者一旦发现未挂掉的参与者中有人处于commit状态或者是prepare-commit的话,那就执行commit操作。否则就执行rollback操作。这样挂掉的参与者恢复之后就能和其他机器保持数据一致性了。(为了简单的让大家理解,笔者这里简化了新选举出来的协调者执行操作的具体细节,真实情况比我描述的要复杂)
简单概括一下就是,如果挂掉的那台机器已经执行了commit,那么协调者可以从所有未挂掉的参与者的状态中分析出来,并执行commit。如果挂掉的那个参与者执行了rollback,那么协调者和其他的参与者执行的肯定也是rollback操作。
所以,再多引入一个阶段之后,3PC解决了2PC中存在的那种由于协调者和参与者同时挂掉有可能导致的数据一致性问题。
3PC存在的问题
在doCommit阶段,如果参与者无法及时接收到来自协调者的doCommit或者rebort请求时,会在等待超时之后,会继续进行事务的提交。
所以,由于网络原因,协调者发送的abort响应没有及时被参与者接收到,那么参与者在等待超时之后执行了commit操作。这样就和其他接到abort命令并执行回滚的参与者之间存在数据不一致的情况。
2pc和3pc区别
3pc背景:
2pc协议在协调者和执行者同时宕机时(协调者和执行者不同时宕机时,都能确定事务状态),选出协调者之后 无法确定事务状态,会等待宕机者恢复才会继续执行(无法利用定时器来做超时处理,超时后也不知道事务状态,无法处理,强制处理会导致数据不一致),这段时间这个事务是阻塞的,其占用的资源不会被释放。为了解决这个问题,产生了3PC协议。
原理:
3PC增加了一个中间状态,方便判断事务状态,新的协调者不用等宕机者恢复 就能决定事务状态,准确的提交事务或者终止事务。
1.CanCommit(能否提交)
2.PreCommit(预提交)
进入这个状态,说明各执行节点的状态都是canCommit
3.doCommit(预提交)
进入这个状态,说明个执行节点的状态都是precommit
新协调者如果发现有的存活节点的状态是preCommit或doCommit,说明各执行节点的状态肯定都是"可以提交",协调者直接提交事务,能保证数据一致性 。
如果发现有的存活节点状态是abort状态,说明事务被中断了,协调者继续中断事务就行。
如果发现所有节点都是canCommit,说明各执行节点不会有处于doCommit状态(因为如果有节点是canCommit,不会有节点是canCommit状态),协调者中断事务,能保证数据一致性。
结论:
3pc解决了事务状态不可知的问题。不过其对执行者引入超时机制(超时后根据执行器当前状态canCommit or preCommit回滚或者提交事务,释放事务占用的资源),如果发生网络分区,会导致事务数据不一致,虽然提升了系统可用性,不过牺牲了系统一致性,执行者超时这个设计不好。
2pc 3pc归根到底是选择系统可用性还是选择系统一致性(CAP理论中的抉择问题)
2pc 一致性好、可用性较低,3pc 一致性较低、可用性高
分布式理论基础(二)选举、多数派和租约
分布式理论基础(三)时间、时钟和事件顺序