【CNN基础】局部响应归一化、gated convolution和gated deconv
〇、 参考文献
- 论文来源:
Yu J, Lin Z, Yang J, et al. Free-form image inpainting with gated convolution[J]. arXiv preprint arXiv:1806.03589, 2018. DeepFillv2-code
Jo Y, Park J. SC-FEGAN: Face Editing Generative Adversarial Network with User’s Sketch and Color[J]. arXiv preprint arXiv:1902.06838, 2019. SC-FEGAN-code - 相关博客:
论文阅读之《Image Inpainting for Irregular Holes Using Partial Convolutions》
一、gated conv的引入
1. gated conv 解决什么问题?
the proposed gated convolution solves the issue of vanilla convolution that treats all input pixels as valid ones, generalizes partial convolution by providing a learnable dynamic feature selection mechanism for each channel at each spatial location across all layers.
- vanilla convolution(普通卷积)认为所有通道的输入像素都是有效的,但gated convolution可以通过对每个channel应用参数可学的特征选择机制,将所有层响应空间位置的像素融合到一起,达到对partial convolution(部分卷积)进行泛化的目的。
- 针对规则的矩形mask设计出来的GANs无法处理free-form masks,已经有文章论证了vanilla convolution无法解决free-form image inpainting任务。Iizuka et al.2017、Yu et al. 2018
2. vanilla conv 为什么无效?
对于free-form image inpainting任务,vanilla conv是无效
~~~~~~ 首先来看vanilla conv的公式: O y , x = ∑ i = − k h ′ k h ′ ∑ i = − k w ′ k w ′ W k h ′ + i , k w ′ + j ⋅ I y + i , x + j O_{y,x}=\sum_{i=-k_{h}^{'}}^{k_{h}^{'}} \sum_{i=-k_{w}^{'}}^{k_{w}^{'}} W_{k_{h}^{'}+i, k_{w}^{'}+j}\cdot I_{y+i, x+j} Oy,x=i=−kh′∑kh′i=−kw′∑kw′Wkh′+i,kw′+j⋅Iy+i,x+j ~~~~~~ 对于输入图像I的每个通道的坐标点位置 I x , y I_{x, y} Ix,y,都会有相同形态的滤波器(这里指kernel size,非每个滤波器本身的系数)对其进行vanilla conv操作。这对于classificaton和object detection任务是有意义的,因为每一个输入像素对于通过滑窗方式提取local feature都是有效的,即: vanilla conv对每个输入像素使用相同形态但系数不同的滤波器,可以有效地提取出图像的local feature。
~~~~~~ 然而,对于image inpainting任务,input feature由valid pixels outside holes、invalid pixels in the masked regions(这些像素通常指在shallow layers才有,因为随着层数变深,invalid pixel会逐渐变成valid pixel)或synthesized pixels in the masked regions (deep layers)组成,这会使训练产生ambiguity,导致测试阶段产生visual artifacts,比如color discrepancy,blurriness,obvious edge responses。
3. partial conv如何解决ambiguity?
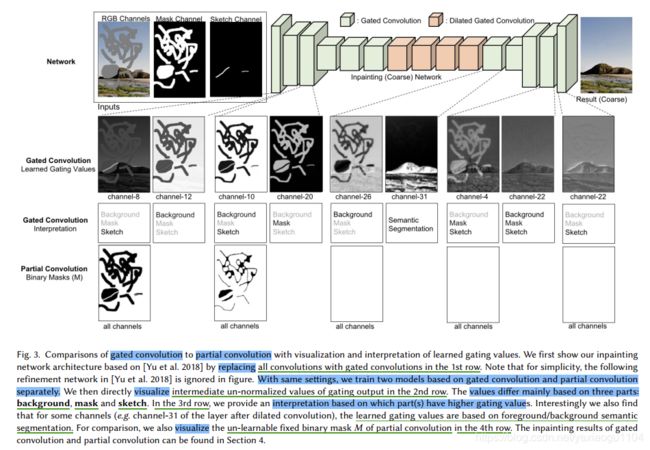
partial conv的mask-update应该是以滑窗为单元,更新策略应该类似于腐蚀操作,随着层数增加,mask的黑色条纹应该会越来越细,图3的示意图可以印证这个观点。更多细节就需要阅读源码。
~~~~~~ 为了让卷积只依赖于valid pixel,partial conv提出了masking和re-normalization策略,partial conv的公式如下: O y , x = { ∑ ∑ W ⋅ ( I ⊙ M s u m ( M ) ) ) i f s u m ( M ) > 0 0 o t h e r w i s e O_{y,x}=\left\{\begin{matrix} \sum\sum W\cdot \left ( I \odot \frac{M}{sum\left (M \right ))} \right ) & if sum\left (M \right ) > 0\\ 0 & otherwise \end{matrix}\right. Oy,x={∑∑W⋅(I⊙sum(M))M)0ifsum(M)>0otherwise
~~~~~~ 其中M是对应的binary mask,每次经过partial conv,mask-update遵循以下策略: m y , x ′ = { 1 i f s u m ( M ) > 0 0 o t h e r w i s e m_{y,x}^{'}= \left\{\begin{matrix} 1 & if sum\left (M \right ) > 0\\ 0 & otherwise \end{matrix}\right. my,x′={10ifsum(M)>0otherwise
~~~~~~ partial conv的确提升了inpainting任务在irregular masks上的表现,但仍有以下几点缺陷:
- 它只是启发式地将所有空间像素分成valid和invalid两种。不论有多少个像素被前一层的滤波器覆盖,下一层的mask都会被设置为Ones(即1 valid pixel和9 valid pixels对于更新当前mask是无差别的)
- 它对于额外的用户输入不兼容。例如user-guided image inmpainting system可以允许用户在mask内部画一些素描作为条件属性,这些素描像素点究竟是valid,还是invalid呢?下一层的mask又该如何更新才好呢?
- 随着层的加深,invalid pixels(mask中的黑色部分)会逐渐消失,mask的所有像素值会慢慢地都变成1,如图3: row-4所示。而gated conv的研究表明,如果让网络自己去学习最佳的mask,网络会给mask的每个空间位置学习到soft mask value(图3: row-2)。即partial conv不如gated conv合理的。
- 每一层的所有channel都共享同一个mask,限制了网络的flexibility。
4. 什么是gated conv
partial conv可以被认为是hard-gating single-channel un-learnable layer再跟input feature map逐像素点乘。
~~~~~~ gated conv抛弃通过固定规则进行更新的hard mask,而是从数据中自动学习soft mask,公式如下: G a t i n g y , x = ∑ ∑ W g ⋅ I Gating_{y,x} = \sum \sum W_{g} \cdot I Gatingy,x=∑∑Wg⋅I F e a t u r e y , x = ∑ ∑ W f ⋅ I Feature_{y,x} = \sum \sum W_{f} \cdot I Featurey,x=∑∑Wf⋅I O y , x = ϕ ( F e a t u r e y , x ) ⊙ σ ( G a t i n g y , x ) O_{y,x} = \phi \left ( Feature_{y,x} \right )\odot \sigma \left ( Gating_{y,x} \right ) Oy,x=ϕ(Featurey,x)⊙σ(Gatingy,x)
~~~~~~ 其中, σ \sigma σ表示对0~1的output gating values使用sigmoid激活函数, ϕ \phi ϕ可以是任意激活函数(ReLU or LeakyReLU)
~~~~~~ gated conv使得网络可以针对每个channel和每个空间位置,学习一种动态特征选择机制。有趣的是,图3: row-3的intermediate gating value可视化表明,网络不仅可以根据background、mask和sketch,也可以根据一些通道的semantic segmentation来选择feature maps。甚至在更深的层,gated conv可以在不同的channel对masked regions进行highlight ,也可以sketch必要的information,来获得更好的inpainting结果。
二、效果展示
客观指标:mean L1 loss, mean L2 loss, mean TV loss
主观效果
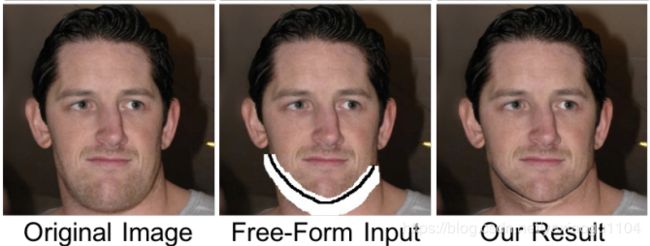
1. DeepFillv2主观效果
- 观察眉毛部分,partial conv可以恢复出皮肤的纹理和颜色,但是黑色线条对应的眉毛却没恢复出来,根据之前“partial conv的mask-update类似于腐蚀操作”的分析,mask当中的黑色线条会越来越细,最终全部变成白色,眉毛还没恢复出来,mask就已经失效了。
- gated conv则可以拟合并恢复出mask中的黑色线条对应的眉毛,这说明soft mask起了作用。
三、代码实现
实现参考:SC-FEGAN
1. Local response normalization(局部响应归一化)
- 局部响应归一化,由于做了平滑处理,可以增加泛化能力,公式如下
b x , y i = a x , y i / ( b i a s + α ∑ j = max ( 0 , i − n / 2 ) min ( N − 1 , i + n / 2 ) ( a x , y i ) 2 ) b_{x,y}^i = a_{x,y}^i/\left( {bias + \alpha \sum\limits_{j = \max (0,i - n/2)}^{\min (N - 1,i + n/2)} {{{(a_{x,y}^i)}^2}} } \right) bx,yi=ax,yi/⎝⎛bias+αj=max(0,i−n/2)∑min(N−1,i+n/2)(ax,yi)2⎠⎞
其中i代表在第几个feature map,(x,y)代表所在feature map位置 - tensorflow有内置函数tf.nn.lrn,参数输入与解释如下
"""Local Response Normalization.
The 4-D `input` tensor is treated as a 3-D array of 1-D vectors (along the last
dimension), and each vector is normalized independently. Within a given vector,
each component is divided by the weighted, squared sum of inputs within
`depth_radius`. In detail,
sqr_sum[a, b, c, d] =
sum(input[a, b, c, d - depth_radius : d + depth_radius + 1] ** 2)
output = input / (bias + alpha * sqr_sum) ** beta
a is batch size. d is channel.
2. gated convolution
~~~~~~ 公式如下
y ( X ) = ( X ∗ W + b ) ⊗ σ ( X ∗ V + c ) y({\bf{X}}) = ({\bf{X*W + b}}) \otimes \sigma ({\bf{X*V + c}}) y(X)=(X∗W+b)⊗σ(X∗V+c)
~~~~~~ 其中 W,V为两个不同的卷积核
~~~~~~ tensorflow实现方法如下
def gate_conv(x_in, cnum, ksize, stride=1, rate=1, name='conv',
padding='SAME', activation='leaky_relu', use_lrn=True, training=True):
assert padding in ['SYMMETRIC', 'SAME', 'REFELECT']
if padding == 'SYMMETRIC' or padding == 'REFELECT':
p = int(rate * (ksize - 1) / 2)
x = tf.pad(x_in, [[0, 0], [p, p], [p, p], [0, 0]], mode=padding)
padding = 'VALID'
x = tf.layers.conv2d(
x_in, cnum, ksize, stride, dilation_rate=rate,
activation=None, padding=padding, name=name)
if use_lrn:
x = tf.nn.lrn(x, bias=0.00005)
if activation == 'leaky_relu':
x = tf.nn.leaky_relu(x)
g = tf.layers.conv2d(
x_in, cnum, ksize, stride, dilation_rate=rate,
activation=tf.nn.sigmoid, padding=padding, name=name + '_g')
x = tf.multiply(x, g)
return x, g
3. gated deconvolution
def gate_deconv(input_, output_shape, k_h=5, k_w=5, d_h=2, d_w=2, stddev=0.02,
name="deconv", training=True):
with tf.variable_scope(name):
# filter : [height, width, output_channels, in_channels]
w = tf.get_variable('w', [k_h, k_w, output_shape[-1], input_.get_shape()[-1]],
initializer=tf.random_normal_initializer(stddev=stddev))
deconv = tf.nn.conv2d_transpose(input_, w, output_shape=output_shape,
strides=[1, d_h, d_w, 1])
biases = tf.get_variable('biases1', [output_shape[-1]], initializer=tf.constant_initializer(0.0))
deconv = tf.reshape(tf.nn.bias_add(deconv, biases), deconv.get_shape())
deconv = tf.nn.leaky_relu(deconv)
g = tf.nn.conv2d_transpose(input_, w, output_shape=output_shape,
strides=[1, d_h, d_w, 1])
b = tf.get_variable('biases2', [output_shape[-1]], initializer=tf.constant_initializer(0.0))
g = tf.reshape(tf.nn.bias_add(g, b), deconv.get_shape())
g = tf.nn.sigmoid(deconv)
deconv = tf.multiply(g,deconv)
return deconv, g